 Maximiliano Rojas
Maximiliano RojasThis module essentially consists of a work based on wolverine haptic system (by a sort of reverse engineering with the video available on youtube ). In this stage the main measures in mm, its composition, the materials, and building. With respect to the algorithm, as it mathematical background, an outline review will be present.
The goals are the same that in other modules, cheap, easy to build and implement.
The idea is the, through a mechanical break, a person can "feel" the grasp of an object (real or virtual) with him two fingers (thumb and index), a potentiometer will be used to measure the distance between the fingers.
1 General design and mathematic model
The mathematical background of this module consists in a rectangle triangle formed with the half of the equilateral, so, as all length of the triangle are known, to found the distance just form the next trigonometric relation:
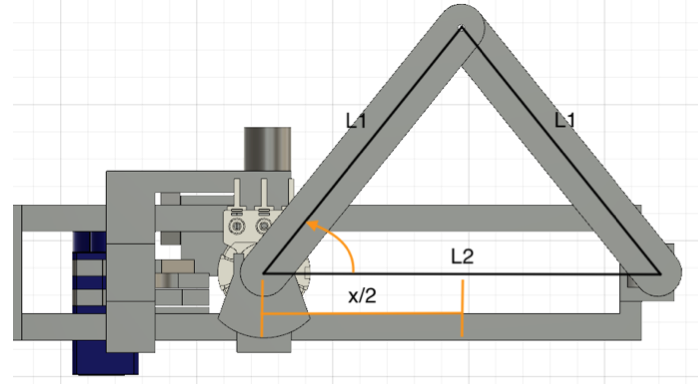
If we look carefully, 2*L1 is equal to L2 when the angle is zero, so:
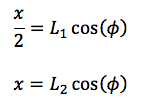
Where x is the distance between the fingers. Now a little explanation of how the break works:
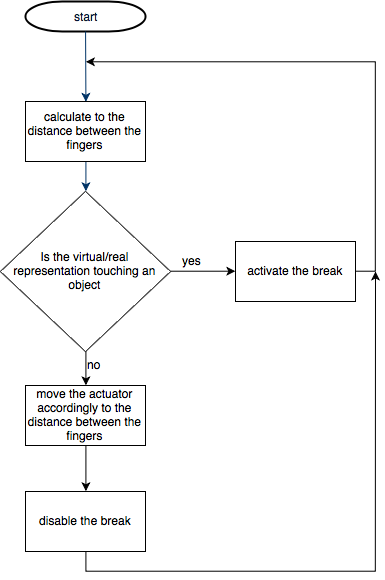
2 Coding
The general scheme for any application must follow the next flowchart:
3 application
The application will be present in a further Stage due to its extension, but you can see a video of how it works now.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.