 Robin Fröjd
Robin FröjdSo the first prototype is coming together. Changed the Brushless motor from a DJI 3510 to an PM2805 with encoder feedback on the Vertical axis. The first version will use a LidarLite V3, here we need a really slow vertical movement @ 0.01 hz and 3.0 hz horizontal, so around 100 seconds for one rotation for a dense 3D Cloud (not for realtime 3D, but for mapping it's ok - like the Leica BLK360)

LidarLite V3 fits nice in the housing. Using 6710 2RS / 61710 2RS 50x62x6 mm bearing at top/bottom to reduce load on motor. The motor needs the power to work against the friction of this two bearings.
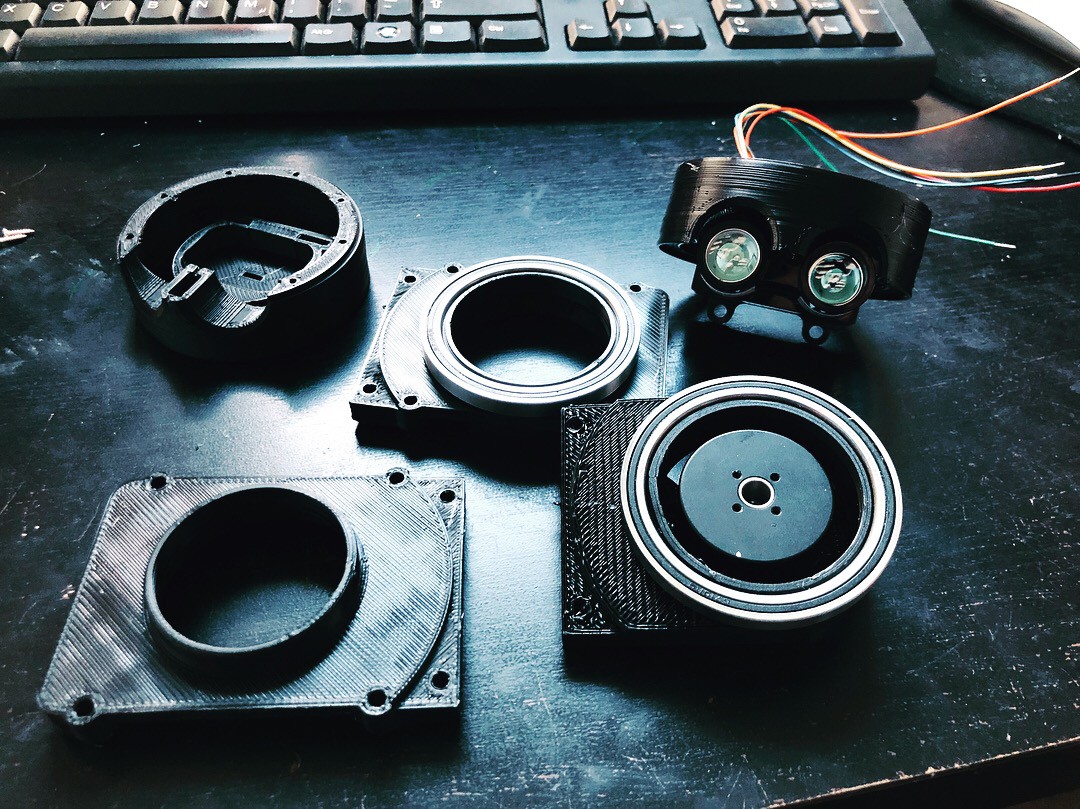
Reducing height with the PM2805 BLDC.

Quick example of running a BLDC motor with an cheap L298 over 5V Powerbank and a Mega.
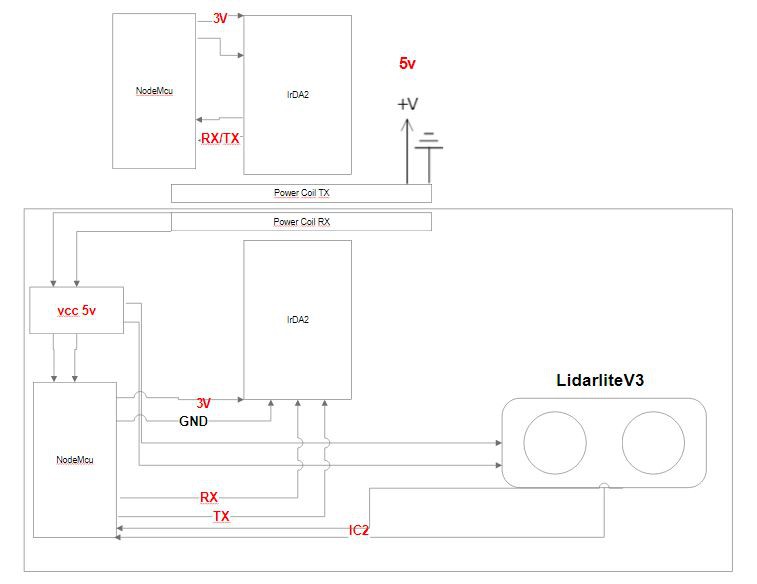
Quick test of IR serial communication between two nodemcu’s. Sending AS5048A sensor data wirelessly.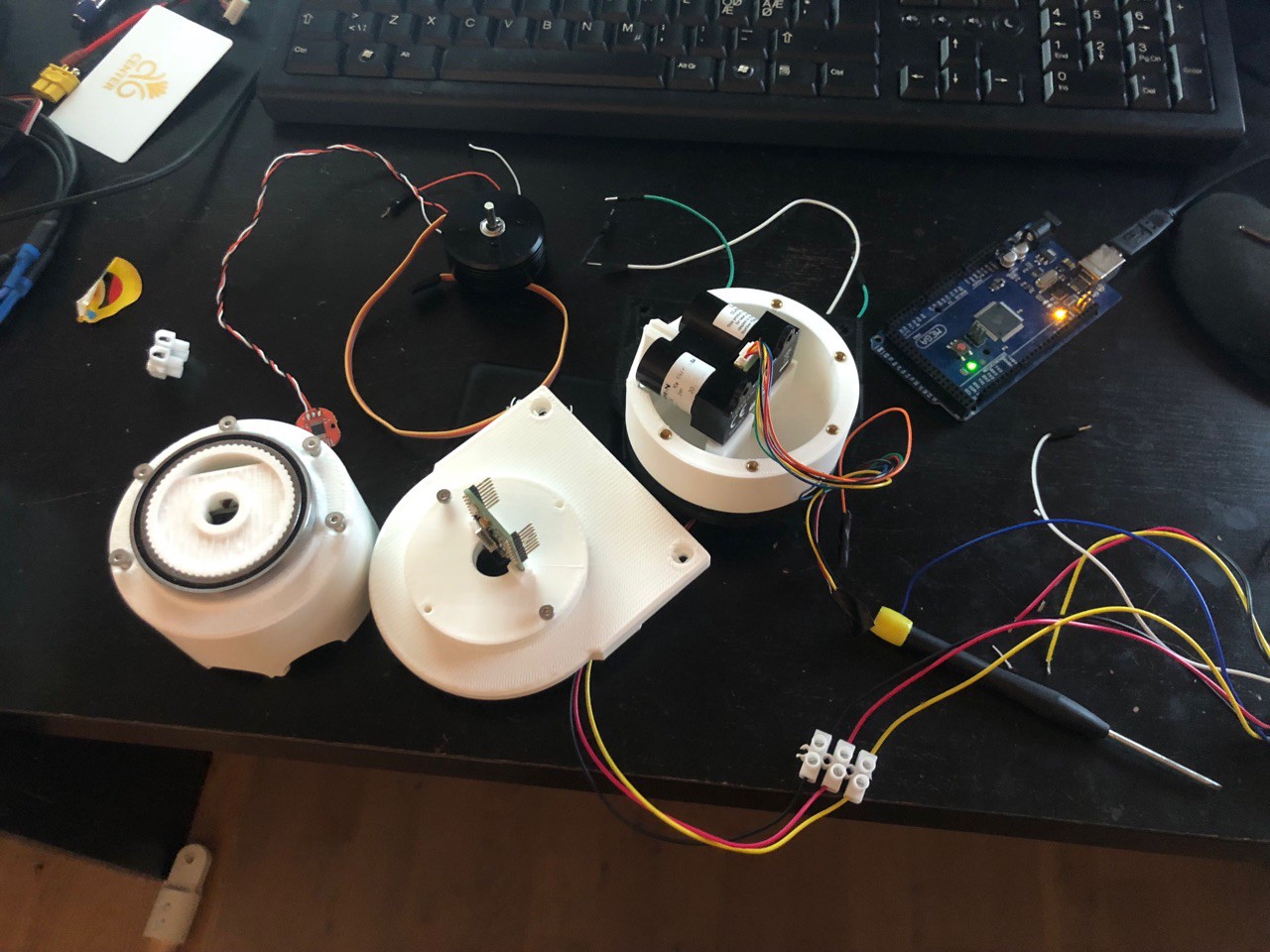


 Anthony
Anthony
 Kris Winer
Kris Winer
 Brian Wyld
Brian Wyld
 markwarren.ee
markwarren.ee
Have you considered slightly different design approach like the "Leica BLK360"?