 Robin Fröjd
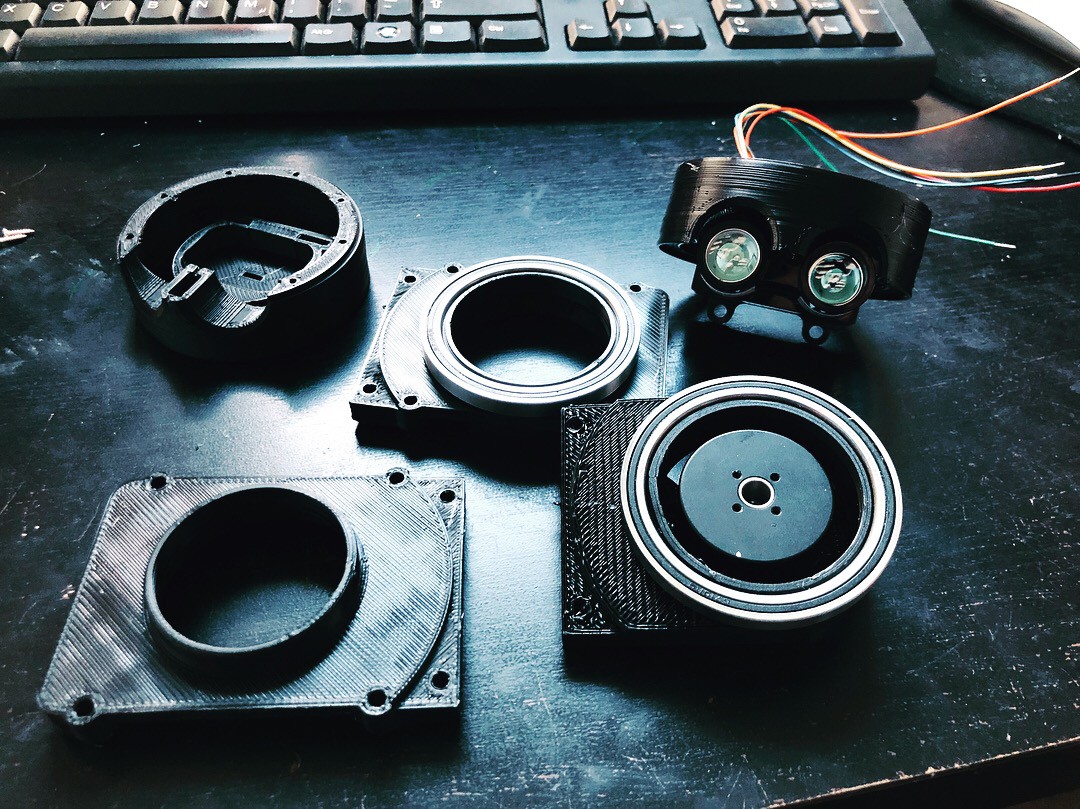
Robin FröjdSo the first prototype is coming together. Changed the Brushless motor from a DJI 3510 to an PM2805 with encoder feedback on the Vertical axis. The first version will use a LidarLite V3, here we need a really slow vertical movement @ 0.01 hz and 3.0 hz horizontal, so around 100 seconds for one rotation for a dense 3D Cloud (not for realtime 3D, but for mapping it's ok - like the Leica BLK360)

LidarLite V3 fits nice in the housing. Using 6710 2RS / 61710 2RS 50x62x6 mm bearing at top/bottom to reduce load on motor. The motor needs the power to work against the friction of this two bearings.
Reducing height with the PM2805 BLDC.

Quick example of running a BLDC motor with an cheap L298 over 5V Powerbank and a Mega.
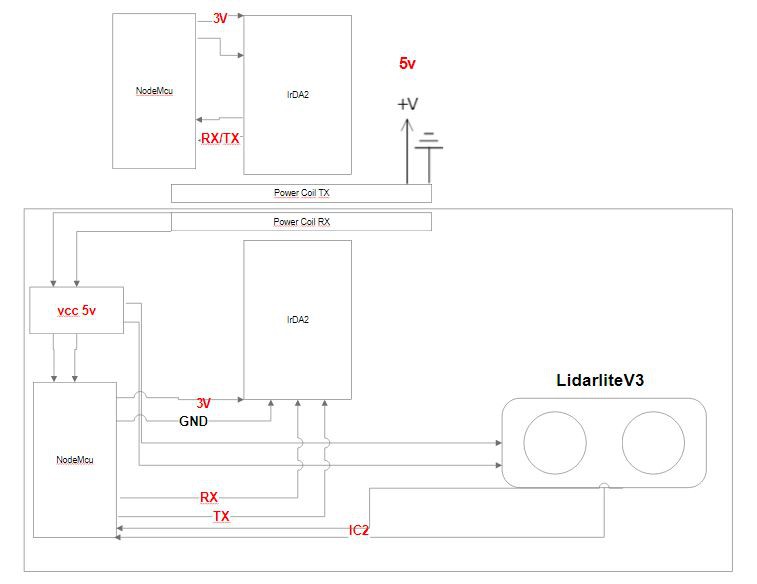
Quick test of IR serial communication between two nodemcu’s. Sending AS5048A sensor data wirelessly.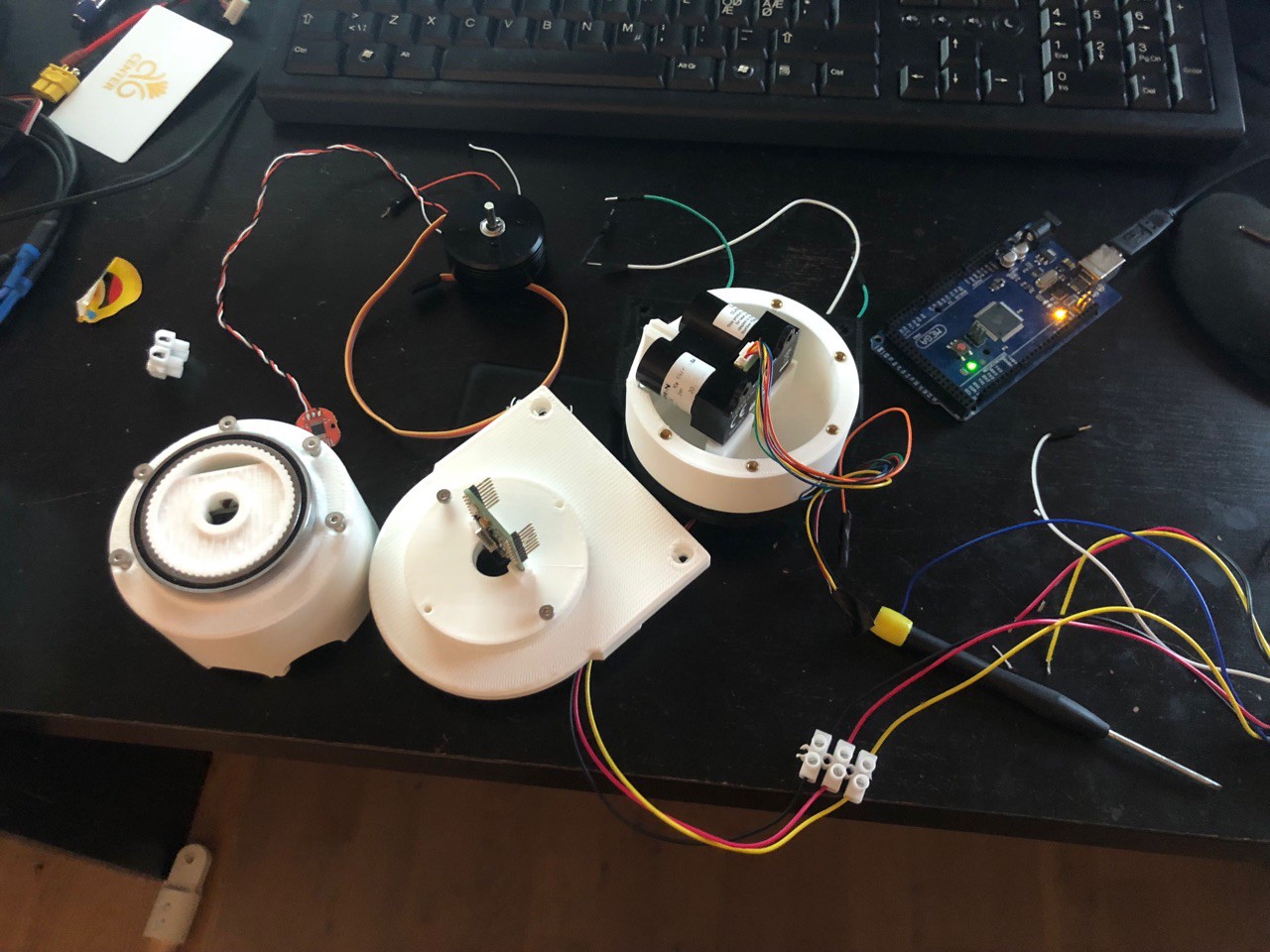

Have you considered slightly different design approach like the "Leica BLK360"?