Dennis
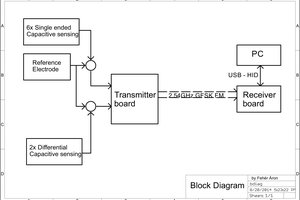
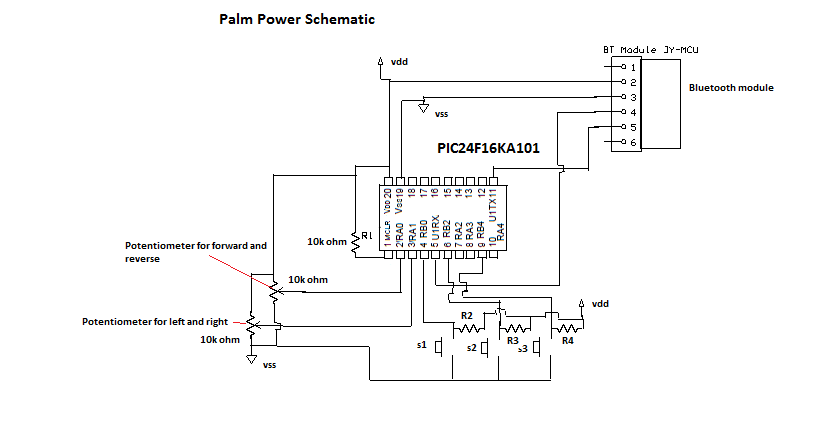
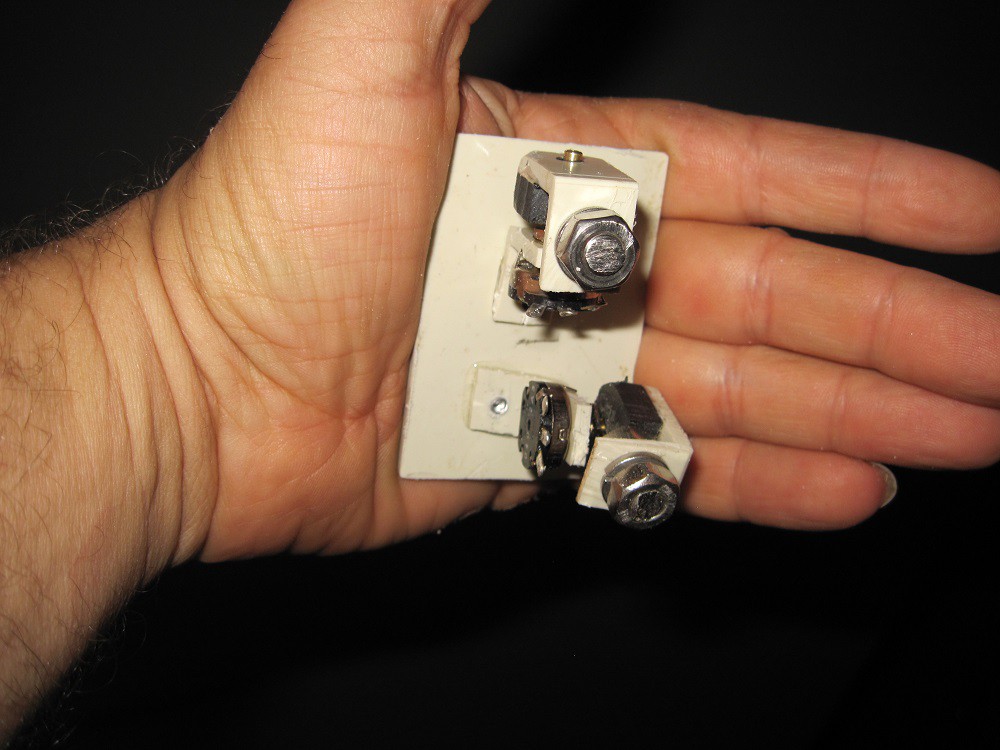
DennisPalm power is an open source wearable device to control a robot's motion with just the tilt of a hand. Two potentiometers with off-set weights on their shafts are used to determine if the hand is tilted forward, backward, left or right. One potentiometer reads pitch and the other potentiometer reads roll. Three touch switches are included to add additional user defined controls, such as turn on LEDs for lighting. At the heart of Palm Power is a MicroChip PIC24F16KA101. The PIC24F16KA101 reads the two potentiometers with two analog input pins. Three pins are configured for inputs to read the three touch switches. The PIC24F16KA101 communicates to a robot via Bluetooth with a JY-MCU V1.02 USART to Bluetooth module.
Agenda:
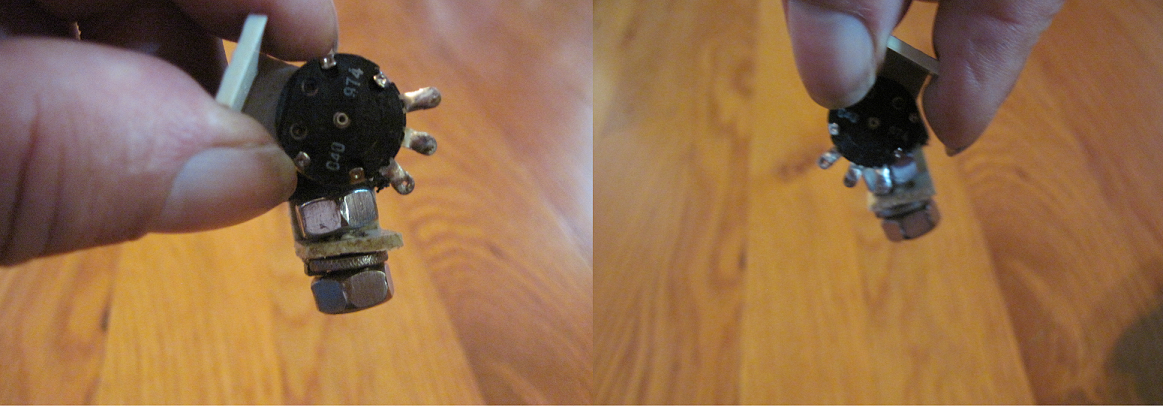
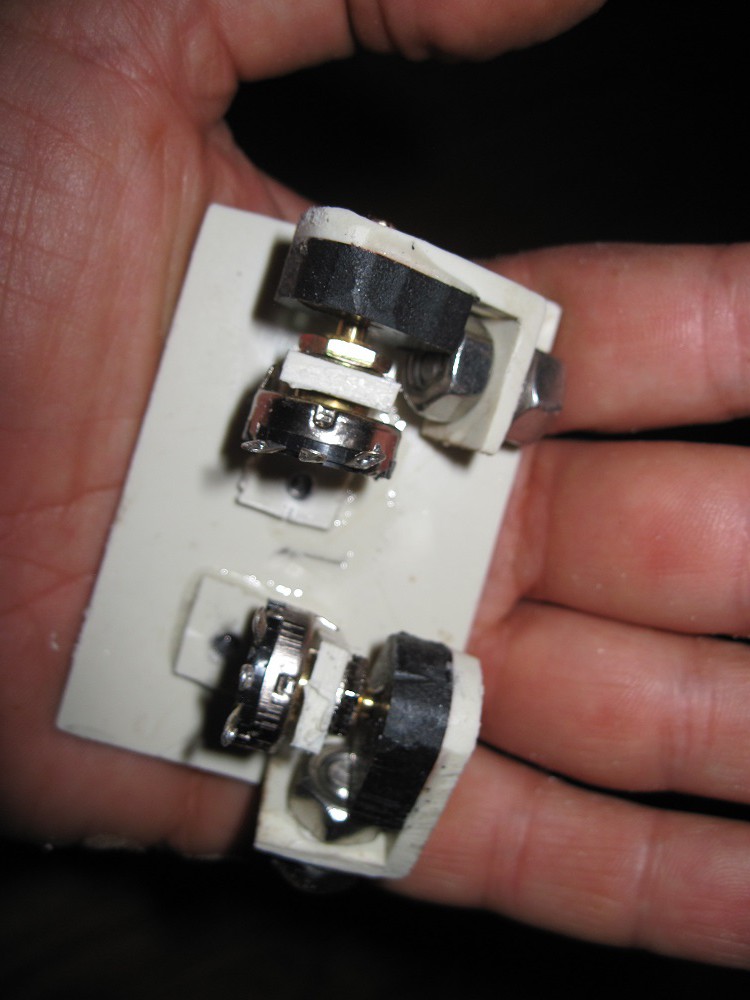
- Assemble two potentiometers with mounting brackets and offset weights to sense the pitch and roll of a hand.
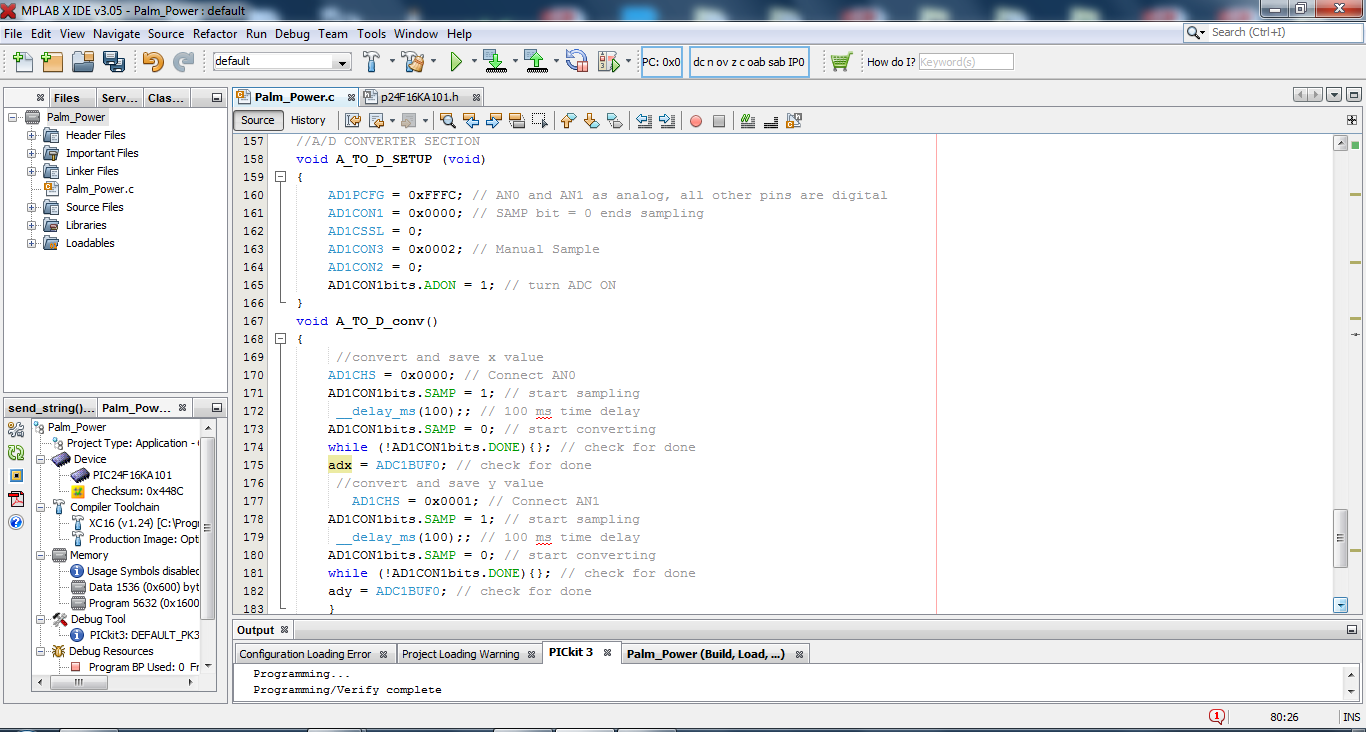
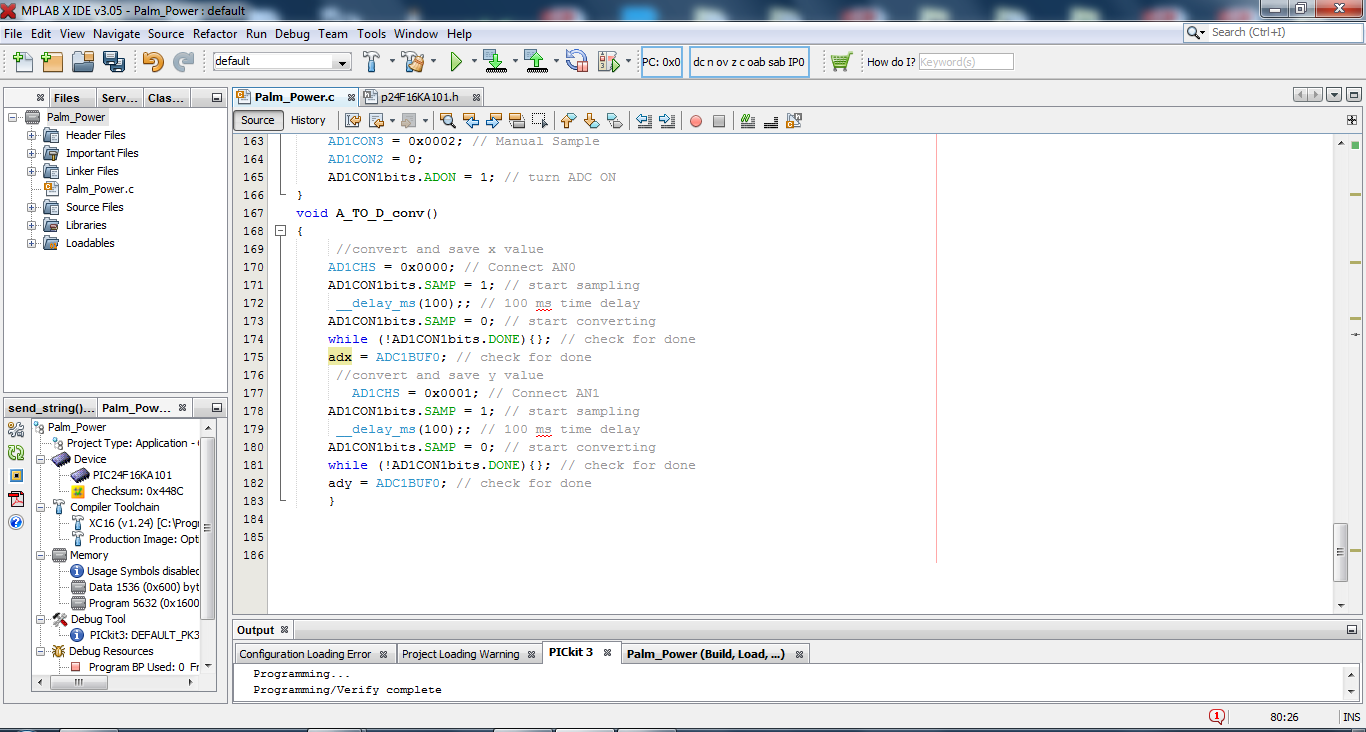
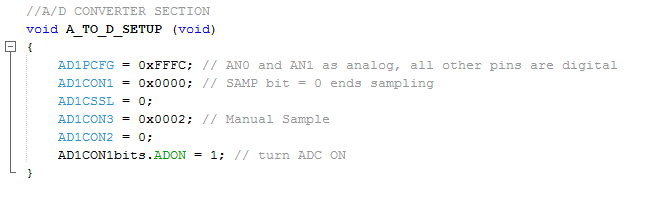
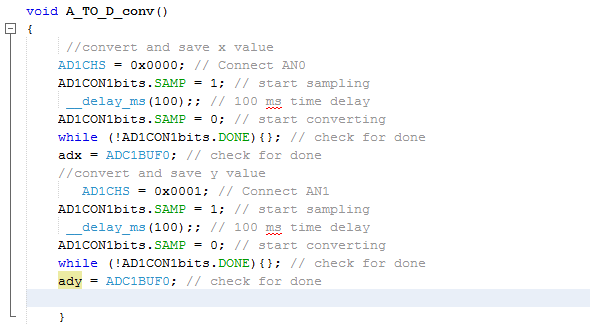
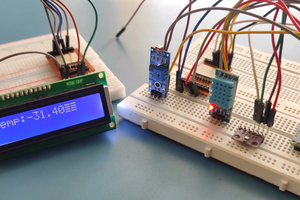
- Design and assemble a circuit to read the potentiometers and touch switches.
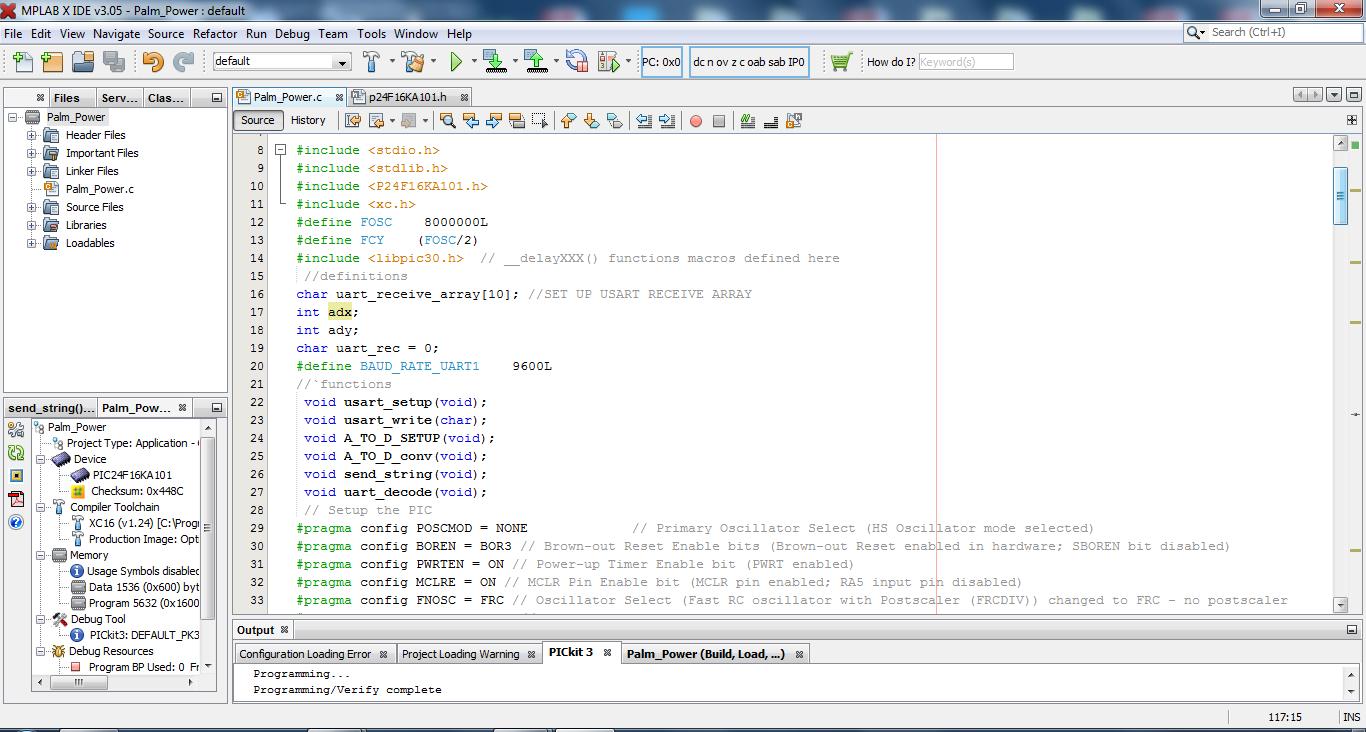
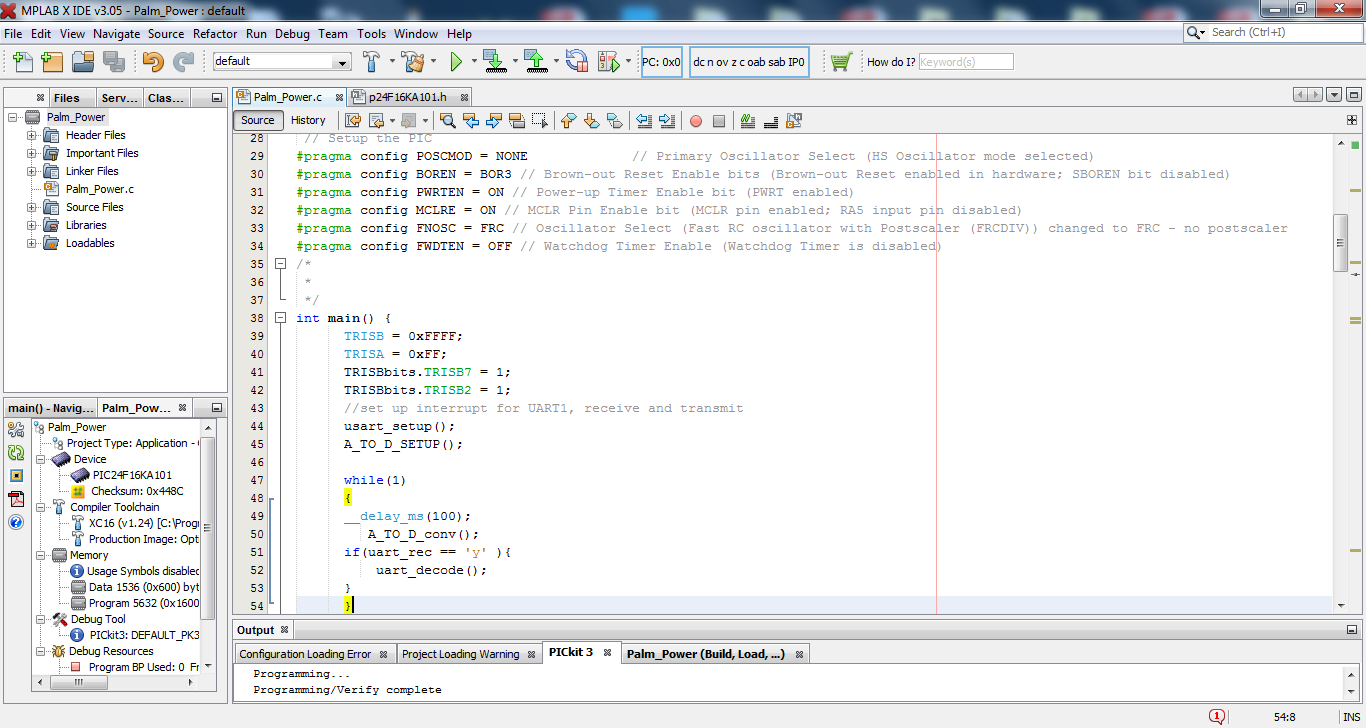
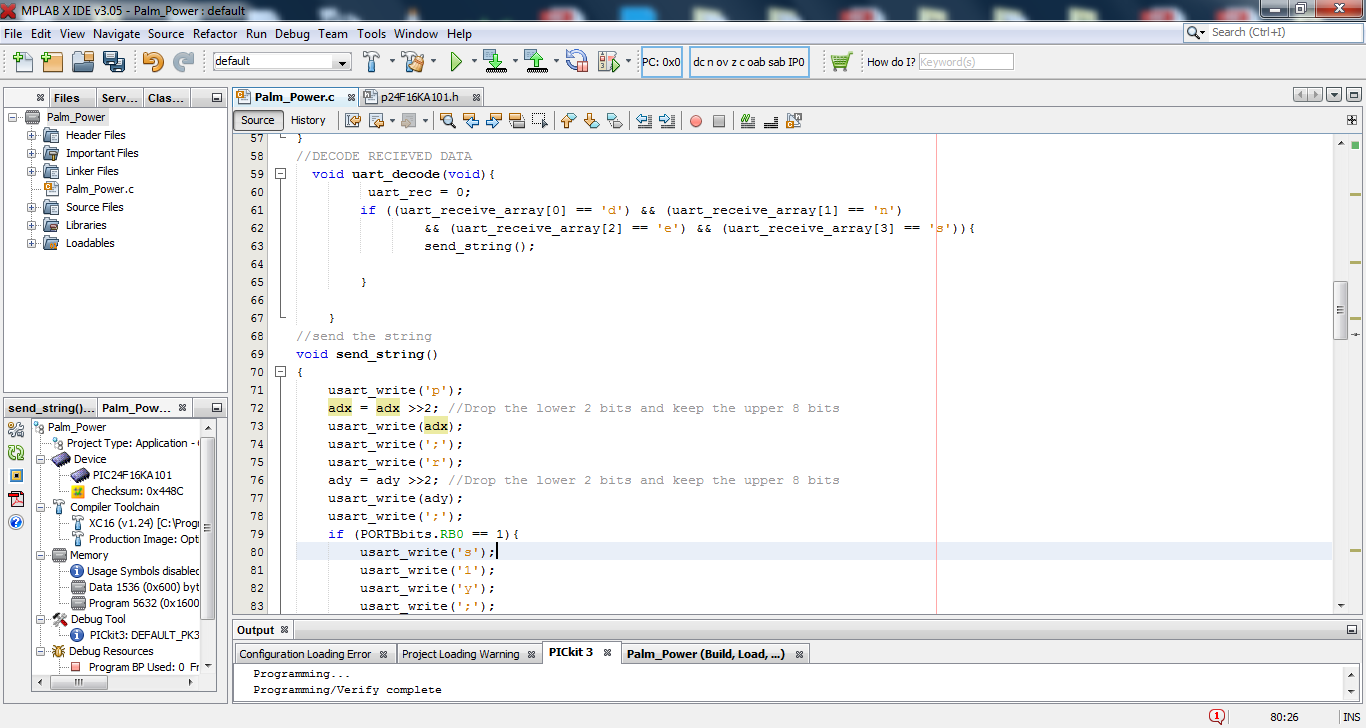
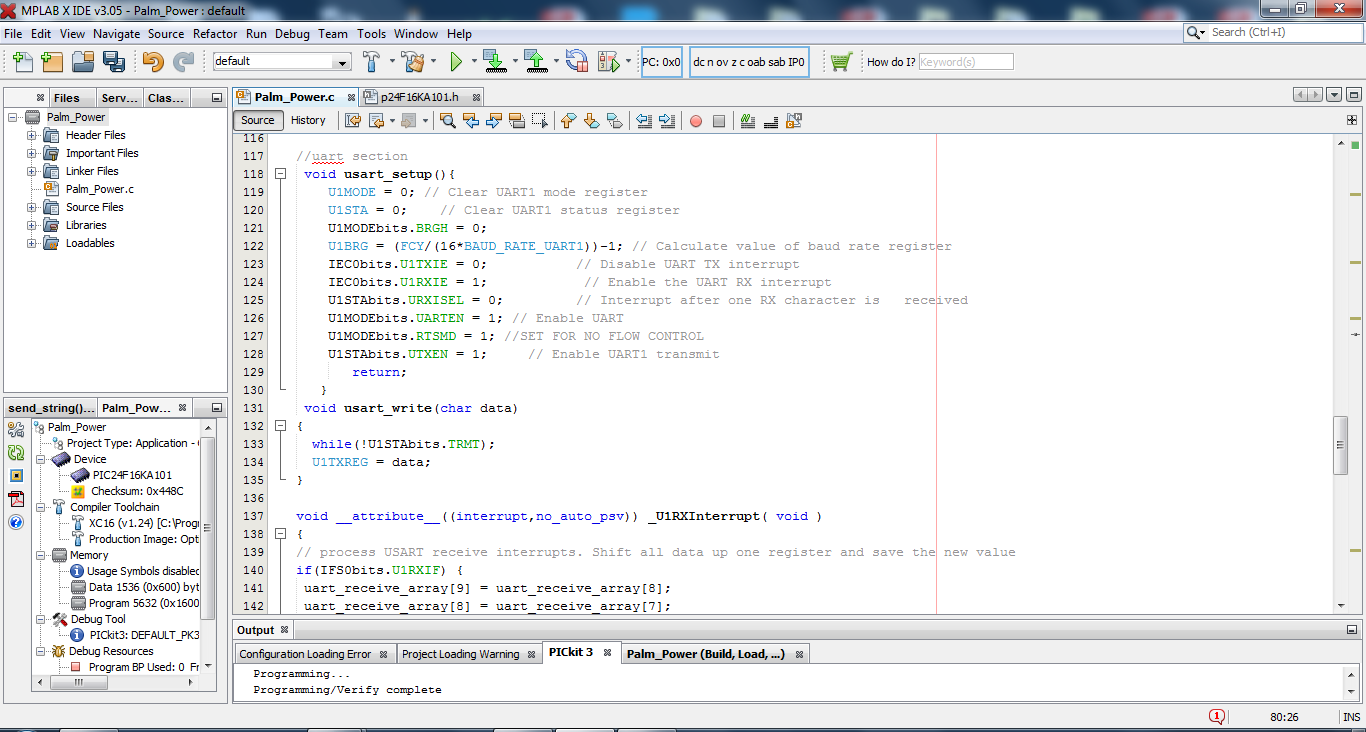
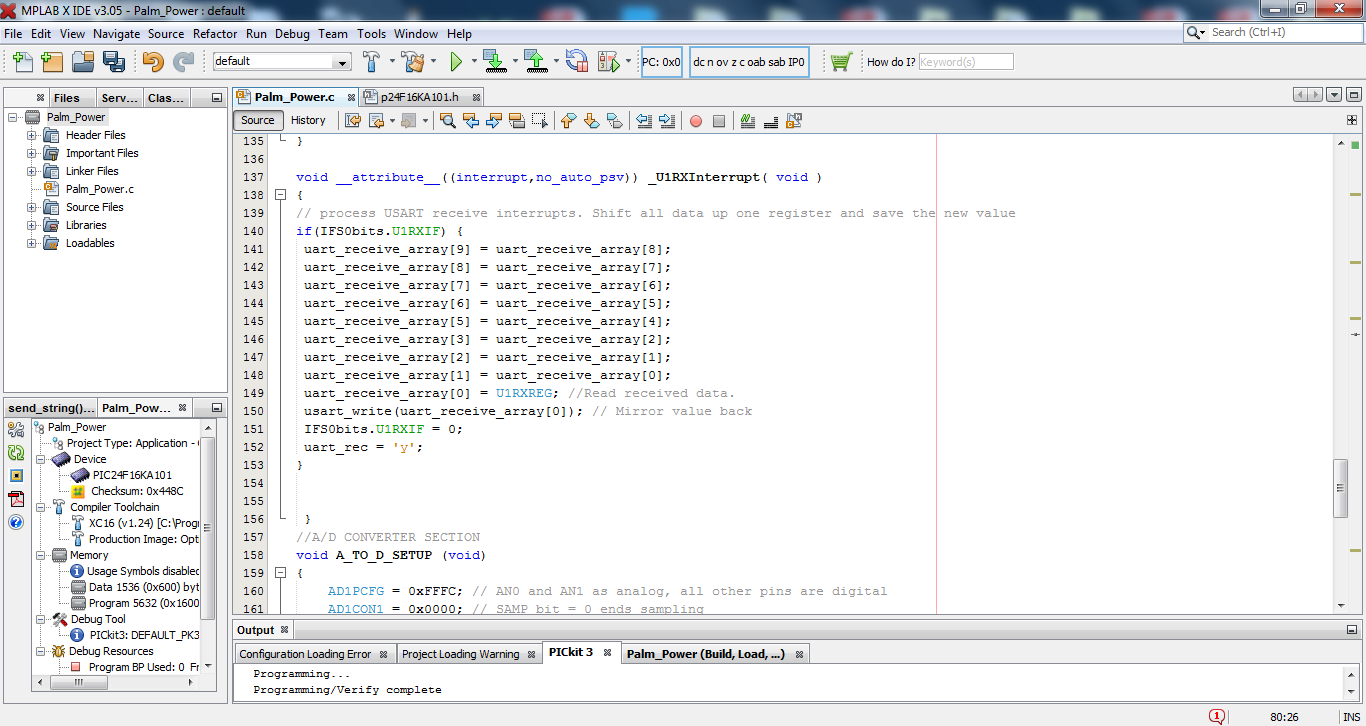
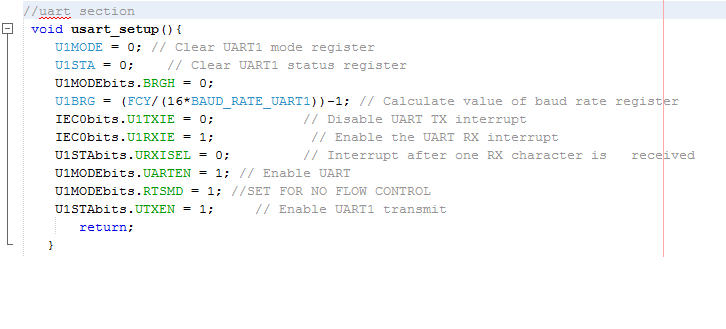
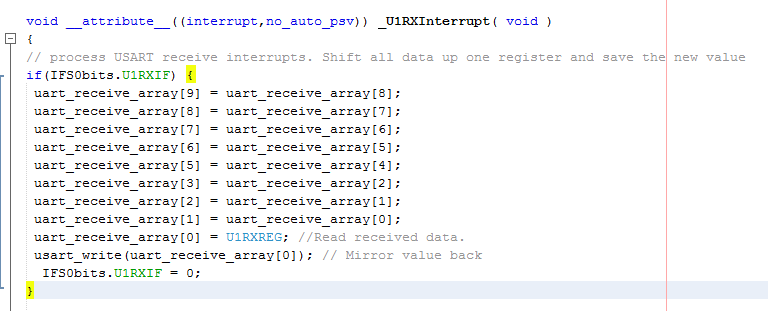
- Configure the PIC’s UART to send a data stream to a Bluetooth module.
- Configure a Bluetooth module to communicate with a robot.
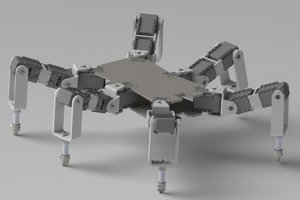
- Program a robot to receive and execute the commands.
*License information is in the repository*






 Vladimir
Vladimir