 Roger
RogerSince Phoebe will be a TurtleBot variant built out of stuff already in my parts bin, these parts won’t necessarily fit together well. The first thing to do is to figure out how to make the wheels work together. A simple test frame will mount Phoebe’s two drive wheels and see how they cooperate. And besides, building a two-wheel test chassis is how I’ve started many robot projects and that’s worked out well so far. So now let’s make another one to follow in the grand tradition of two wheel test chassis built to test parts going into SGVHAK Rover and Sawppy Rover.
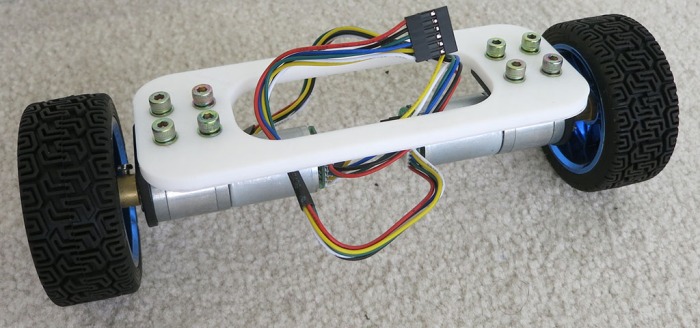
For Phoebe, this simple test chassis established the following:
- I used a caliper to measure wheel mounting bracket dimensions, and they are accurate enough to proceed. They are spaced the correct distance apart, and their diameter is large enough for M4 bolts to slide through without being so large that the resulting wheel wobbles.
- The 5mm thick slender connecting members are too weak. The next frame will have greater thickness and generally beefier structure.
- I wanted a 20cm track. (Left-right distance between wheel centers.) I measured the dimensions for my wheel assembly but the measurements were a little off. Now I know how much to adjust for the next frame.
- And most importantly: this frame allowed direct comparison of drive wheel resting height against caster wheel height. They were both awkward shapes to measure with a ruler so having the flat surface of a frame makes the measurement easier. Their relative height difference needs to be accounted for in the next frame in order to have a robot body that is level with the ground.
(Cross-posted to NewScrewdriver.com)
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.