 Rudolph
RudolphI got the new lipo batteries the other day, so I finally had to lay out the lower deck and actually make this thing a real robot. Well, closer to it, anyway.
The bottom layer now has the 2 2200mAh 7.4 volt batteries, one for motor power and one for brains power. Also present are the big 5v smps for running the micros and BBB, and a smaller 5v smps for the drive motors and the chassis' pro mini and L298. The two long loops will supply motor battery power to the arms.
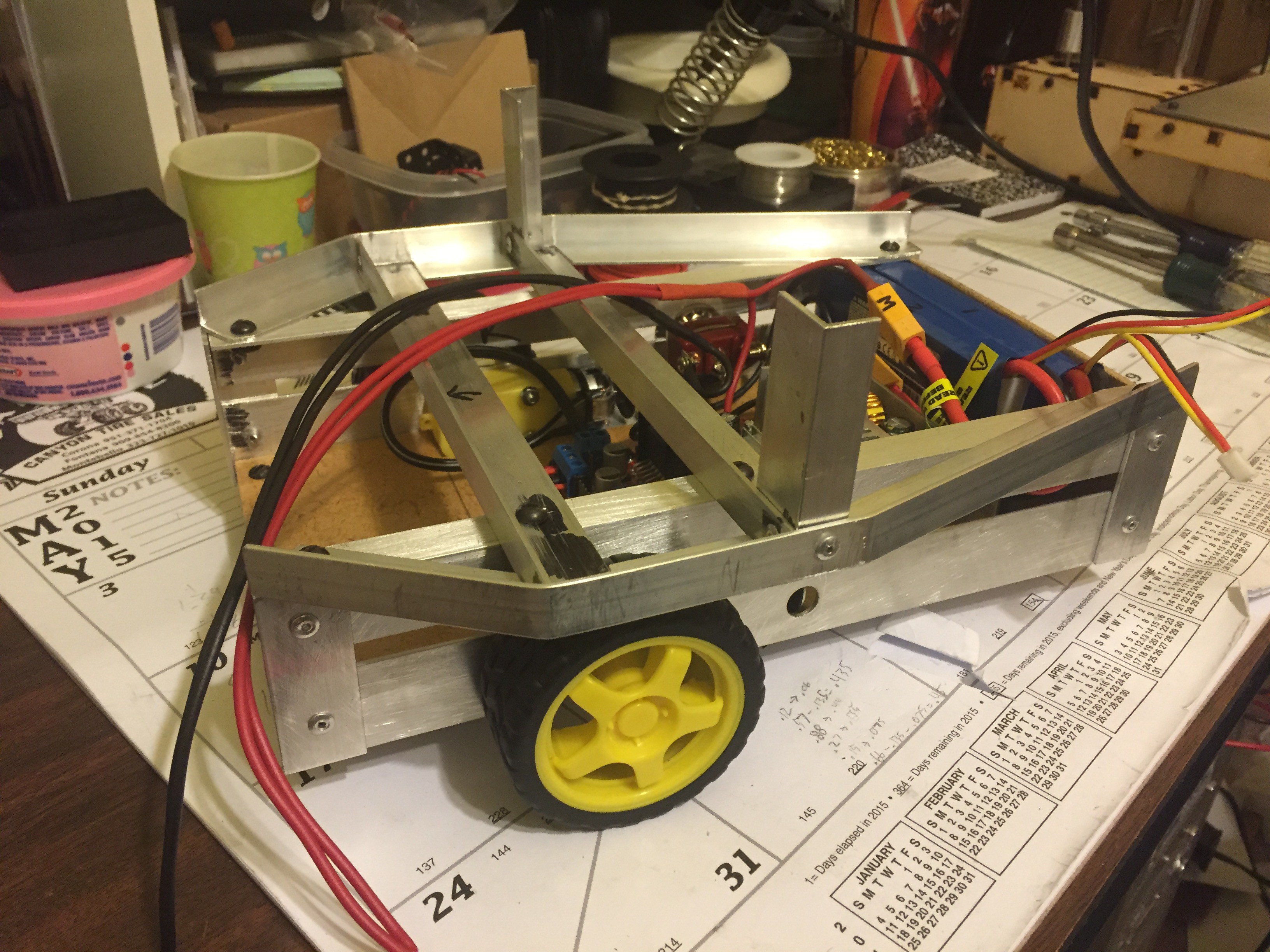
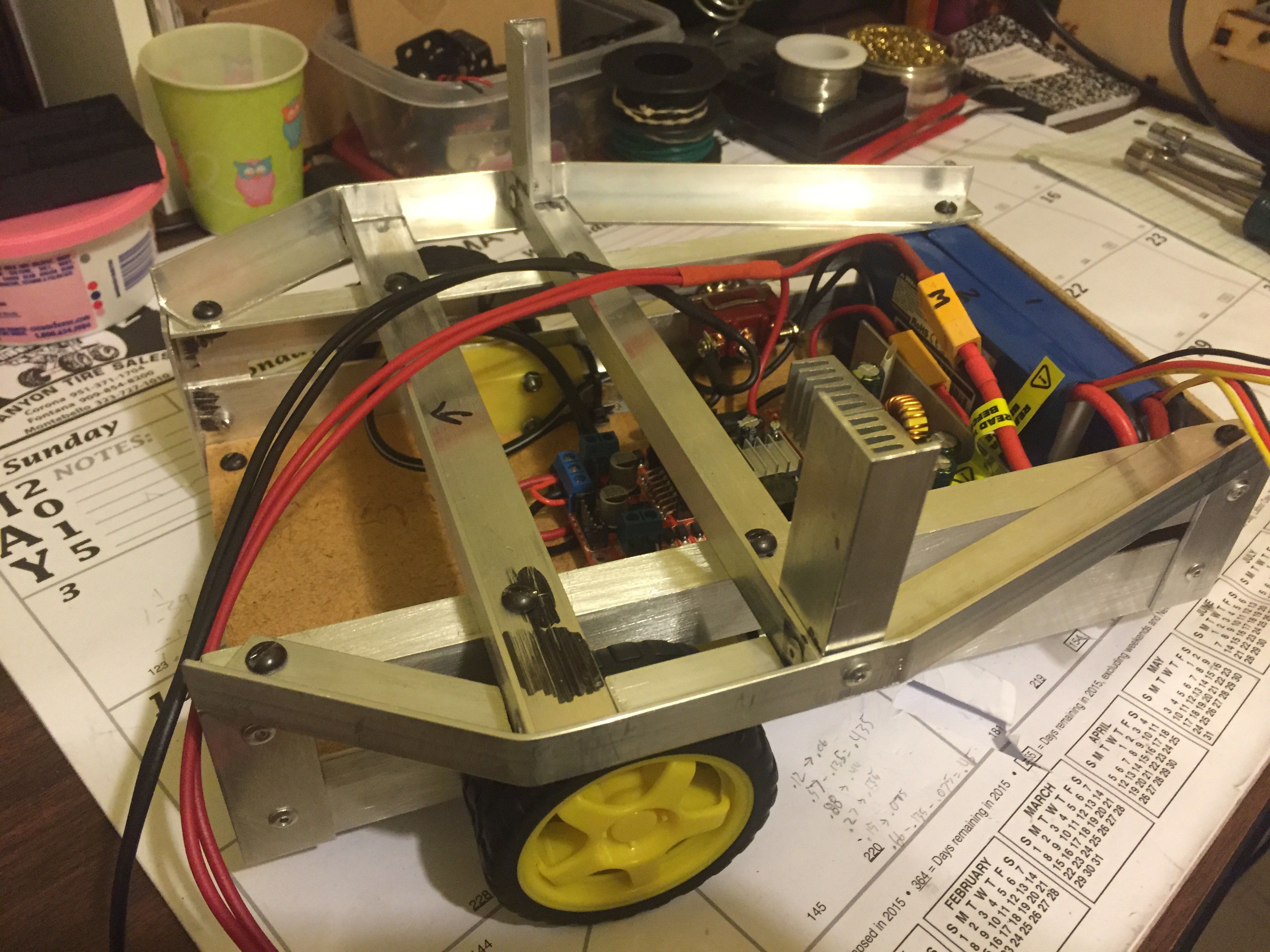
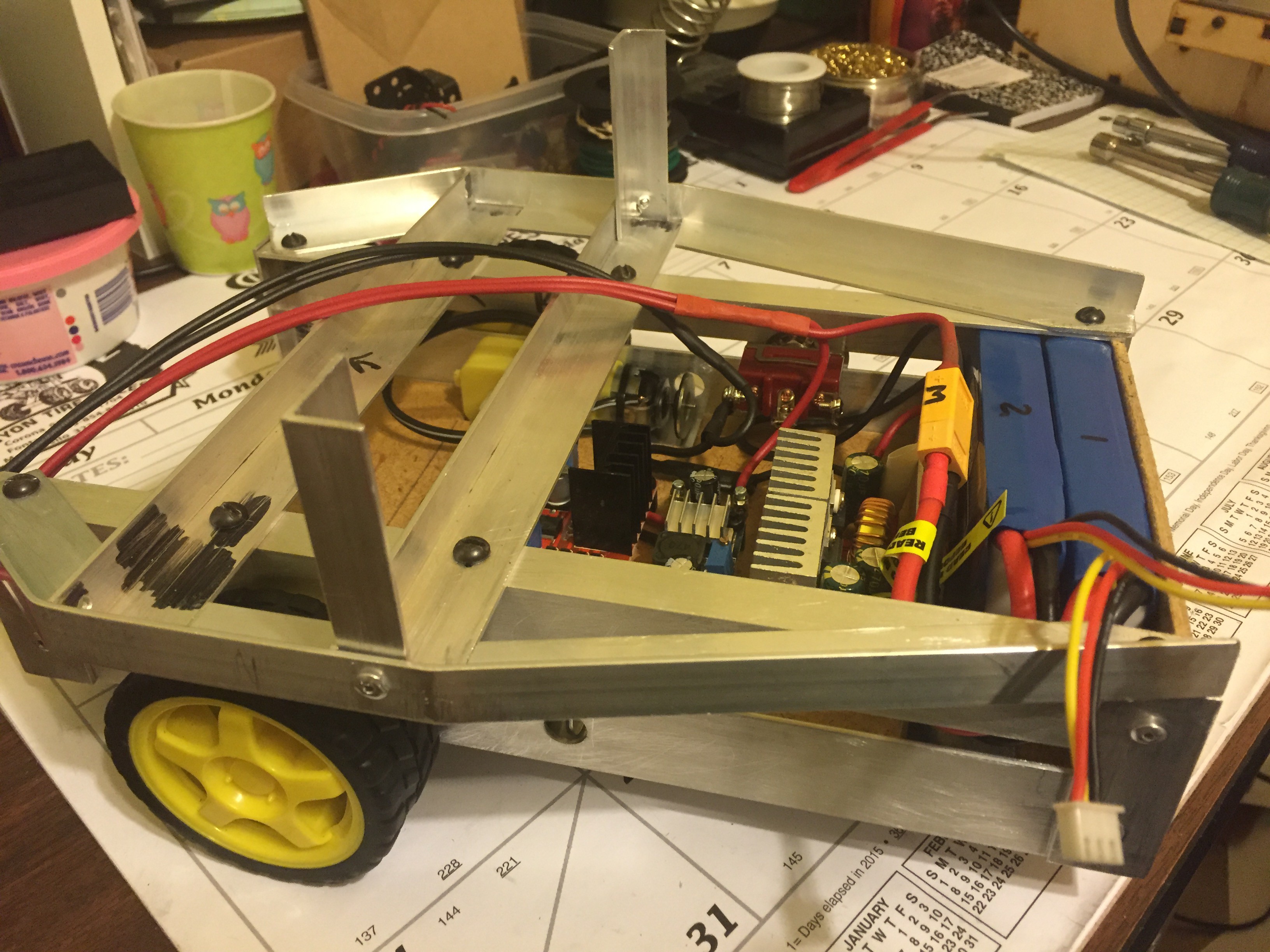
Oh yeah, the chassis-duino will use the MCP3208 to monitor battery cell volts and a couple IR corner sensors.
Tomorrow I'll cut out the top deck plate and stick on a pro mini and breadboard to start the chassis programming. Somewhere in that I'll also add the Hall effect sensors for the wheel encoders.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.