 Rudolph
RudolphDeary Diary,
Yup, been a while. Project R has been largely ignored since not advancing past the quarterfinals of the last THP. Actually it's been worse than ignored, it was dismembered and some of the parts reappropriated. That's okay though because the project has always been tumbling about in the back of my mind.
About a month ago I started really noodling over having another go at Ruprecht. As I've mentioned in other places, I realized that last time I was building Ruprecht for the wrong reasons, and that this time I should build things for myself, not for what I (likely mistakenly) think someone would want to see for a contest entry (imagine that). So I pulled out the box o' remaining parts (which is most of them) and started fiddling again.
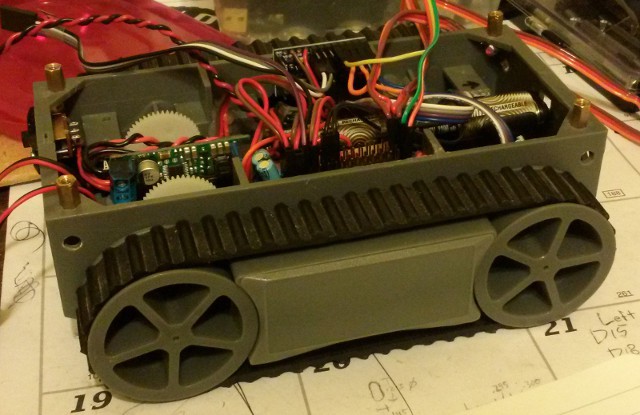
The same basic premise of Project R still applies. A small, low-budget research type of robot to play with machine vision, mapping (SLAM), and whatever else gets "researched" with a Linux-running, webcammed, internetted robot. Ruprecht will still be about the same size as before too, sitting atop the old RP-5 chassis. It will be a bit lower profile though as I've re-thunk how I want to do the arms and head. I guess I need to dig out the crayons and whip up a new CAD rendering. Although I'll likely have the chassis up and running to take a real photo of before I get the attitude to locate the art supplies.
In fact, I had intended to sit down and start writing some code for the chassis, and while looking back on what came before I got sidetracked on HaD dot io and ended up writing this instead. So here's a quick snap of the current state of things.
This post is getting longer than intended, so I'll get one more point out and get back to work. This year's THP states "Build something that matters." I was thinking that over and decided that not only will Ruprecht solve the problem of nerf darts laying all over the house, it'll also play a pivotal role in my (previously mentioned, top-secret) dastardly plans to take over the world. If that isn't something that matters, I don't know what is. The Rules say that last THP semifinalist projects aren't eligible. Since Ruprecht went out at quarterfinals, I guess that means I can enter again. So, I'm re-entering Project R to The Hackaday Prize. What's the worst that can happen, right? :-)
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.