 bornach
bornach
The challenging part was microstepping the stepper motor so that it stayed in sync with the APA102 strip.
This stepper motor only has 20 steps in full rotation. If I had limited the motor control to full or half stepping, it would mean the orientation resolution would have been a 9 or 18 degrees. So I had to implement microstepping that would output a PWM to the GPIO pins controlling the SN754410NE. I couldn't use the built-in PWM of the RPi.GPIO library because it seems to be unstable and segmentation faults whenever I tried to use it for microstepping. So far I have it set to 2 degree resolution. Now for final assembly:
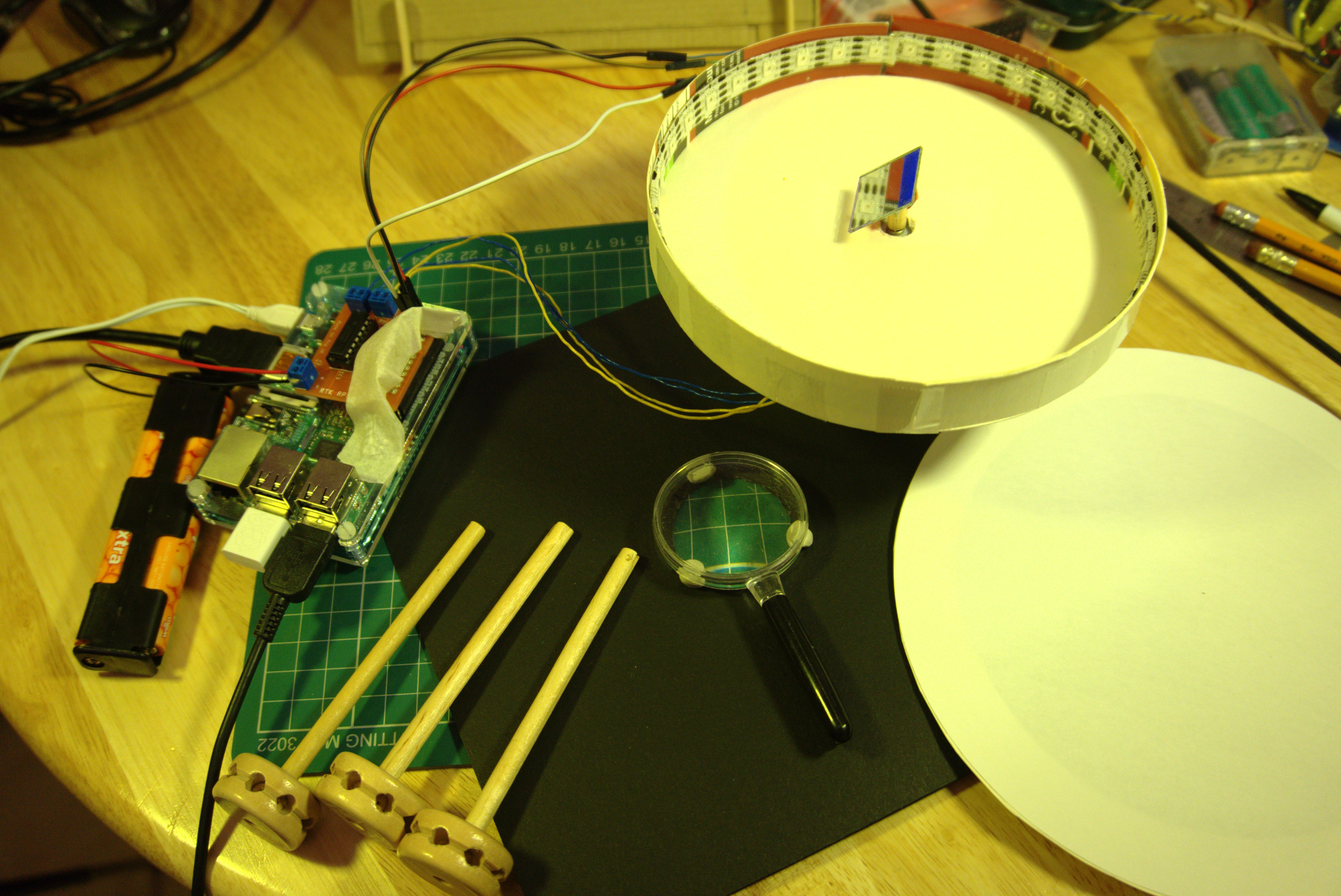
The light from the portion of the LEDs that are illuminated should be redirected upwards by the rotating mirror that has been tilted at 45 degrees. This will need to be collimated using a hole cut in cardboard and focused with the help of a cheap magnifying glass.
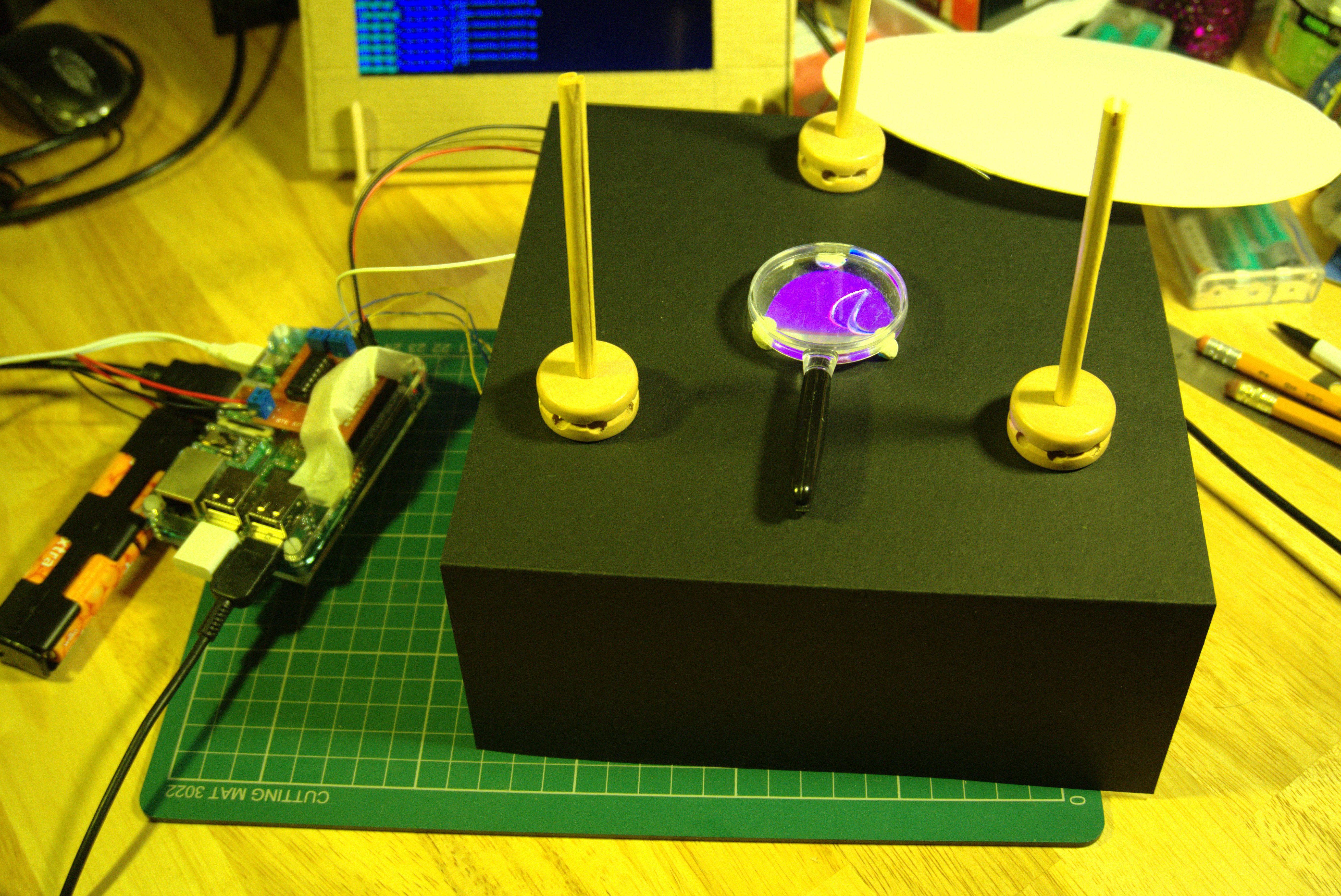
The exact geometry and lens focal length will ultimately determine how far to place the paper screen onto while the LEDs will be projected. This was also done with trial and error.
The image shows the Raspberry Pi 2 with motor driver hat -- I've taken the precaution of using masking tape to avoid accidentally shorting the pins when I attach the LED strip.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.