 Timo Birnschein
Timo BirnscheinAfter buying the Acton Blink Qu4tro, which still is one of the most powerful electric skateboards commercially available, I quickly realized my mistake. I assumed that a relatively small company located in Silicon Valley has enough influence on Chinese motor controller manufacturers to push their own demands through and make a good remote in the process.
My Qu4tro remote control was of such horrible quality that I decided a change is required to actually enjoy this fantastic piece of leisure equipment - which was otherwise almost impossible:
- At cruising speeds, the skateboard would show torque wobble and not run at constant velocity at all
- The remote has trouble communicating when in line of transmission of a wireless communication tower
- The remote has terrible mechanical properties, was way too light, felt very cheap and the throttle potentiometer was even pressure sensitive and would accelerate the board when pressed down - not good in stressful situations!
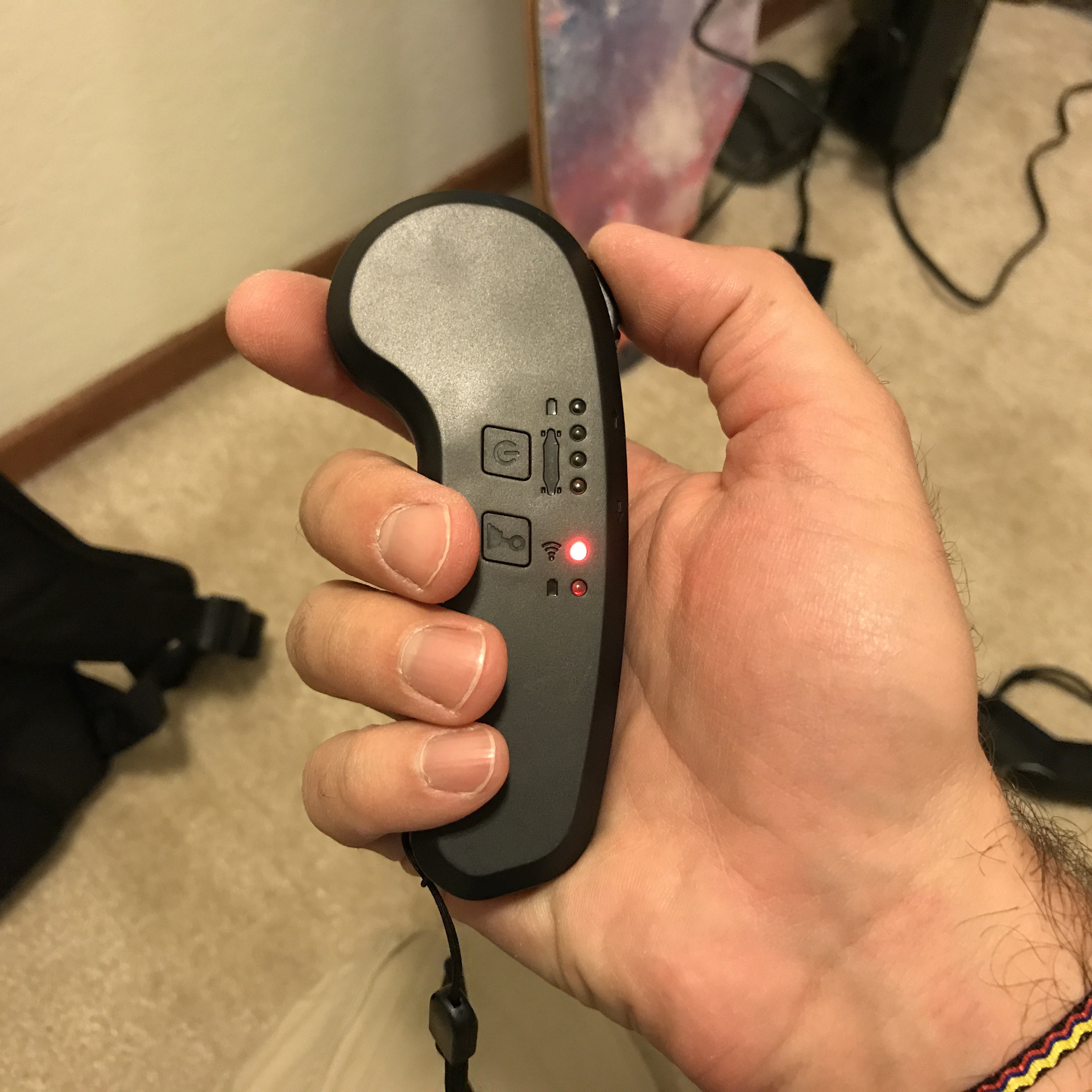
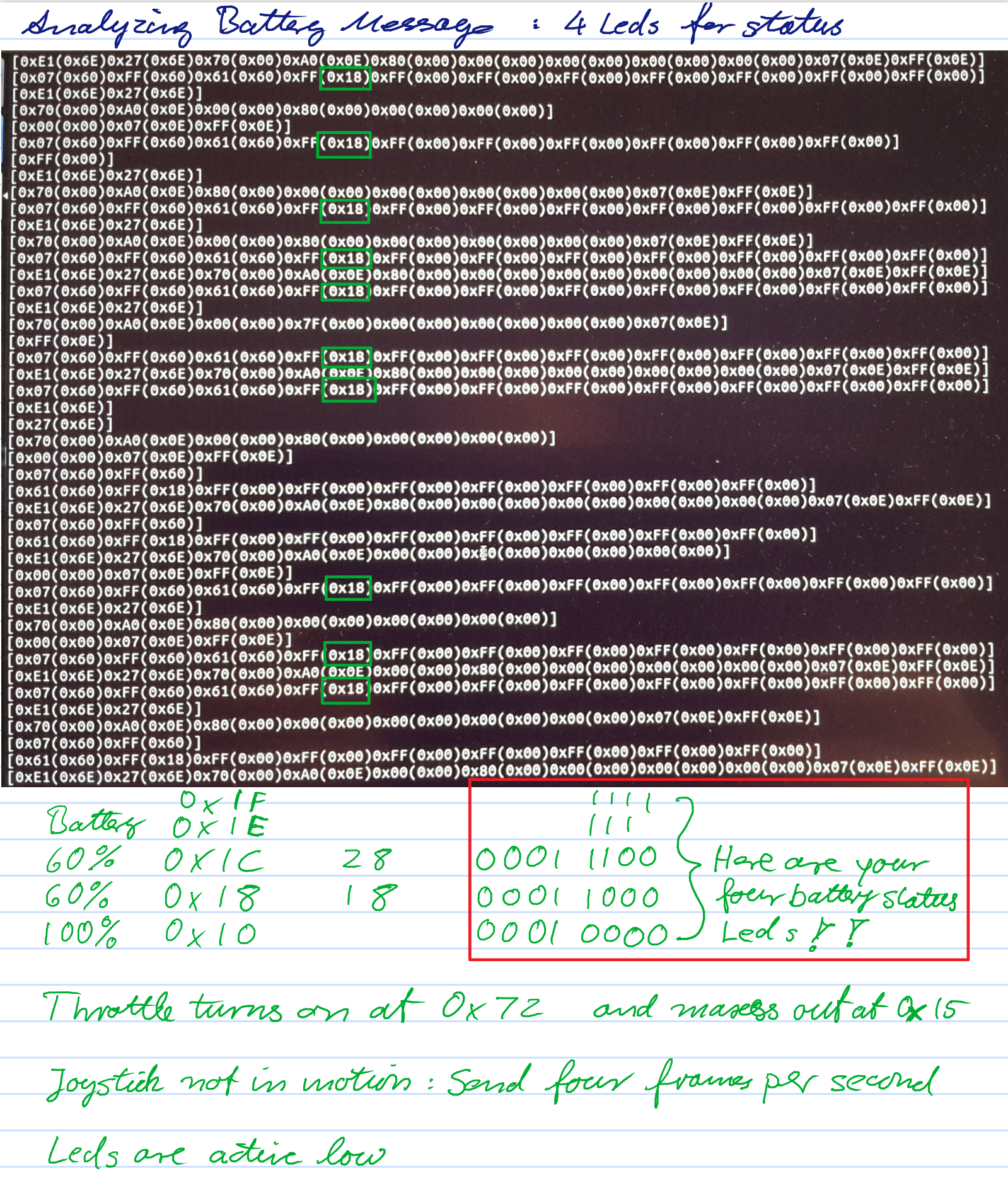
- The remote had a terrible battery indicator that only blinks in different colors at the bottom - the part that is literally hidden in the palm of your hand!
- The battery indicator for an EMPTY REMOTE was also just the same blinking LED in three green successive short blinks! (instead of the long green blinks when the board itself is fully charged!!)
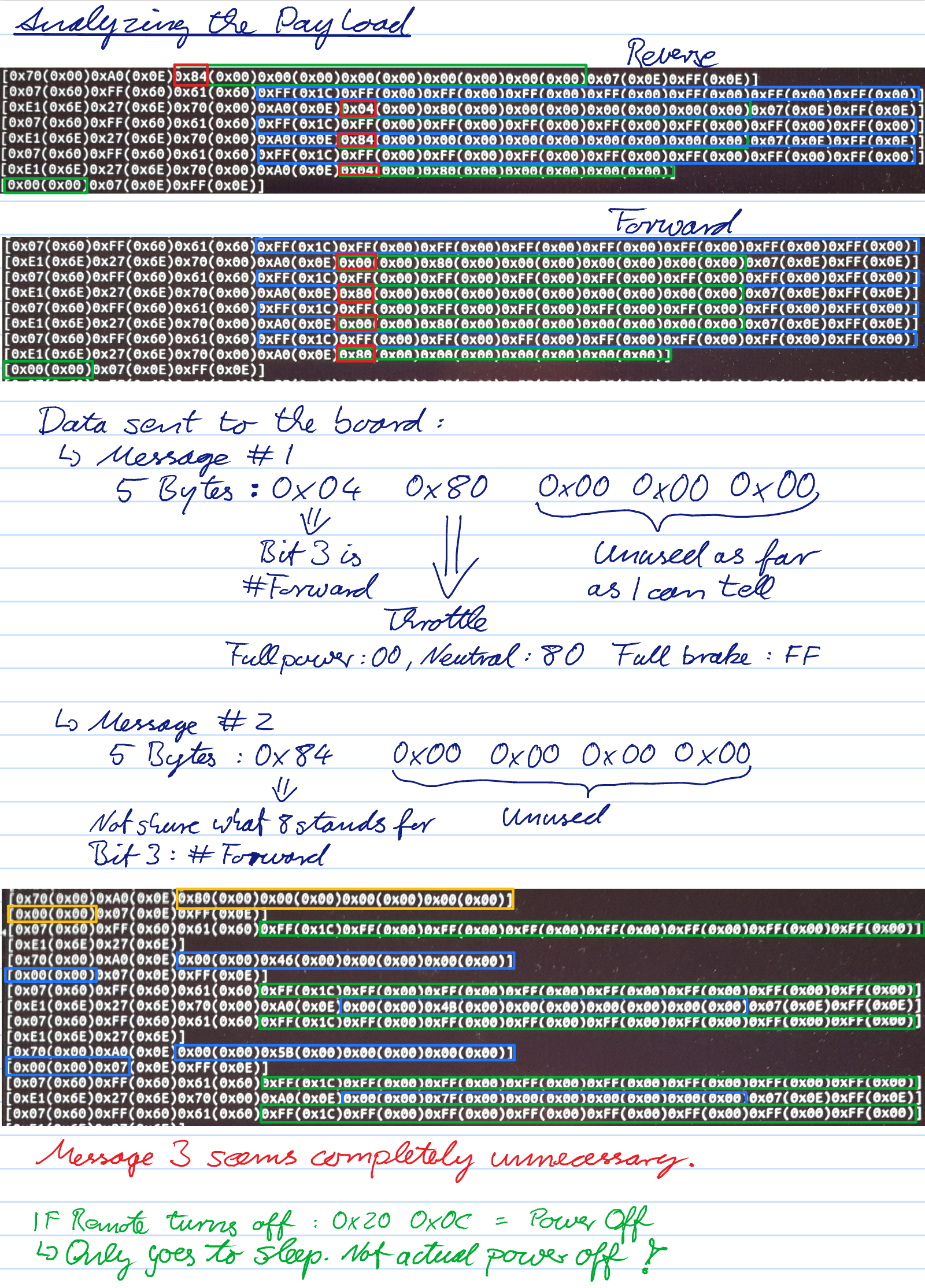
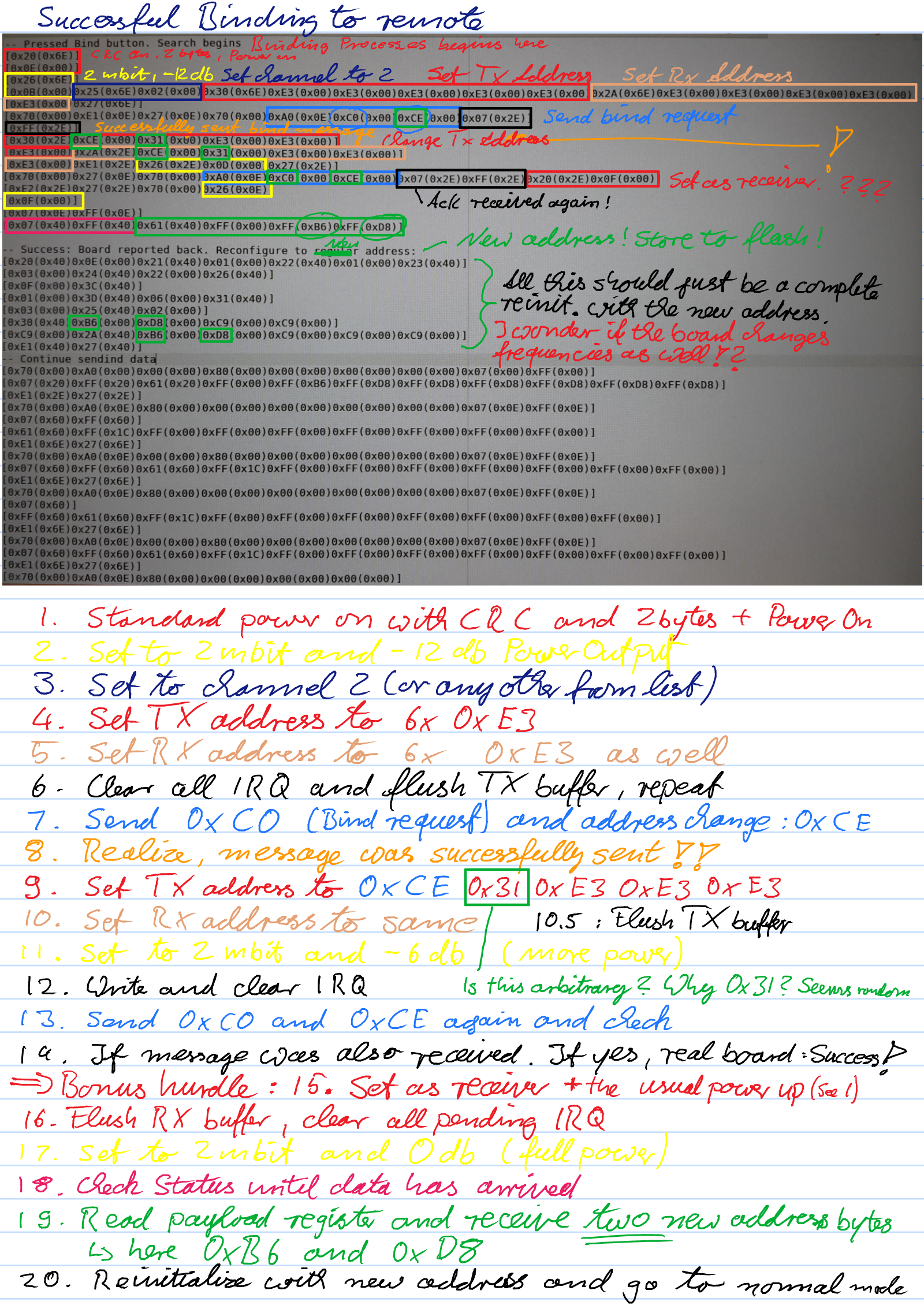
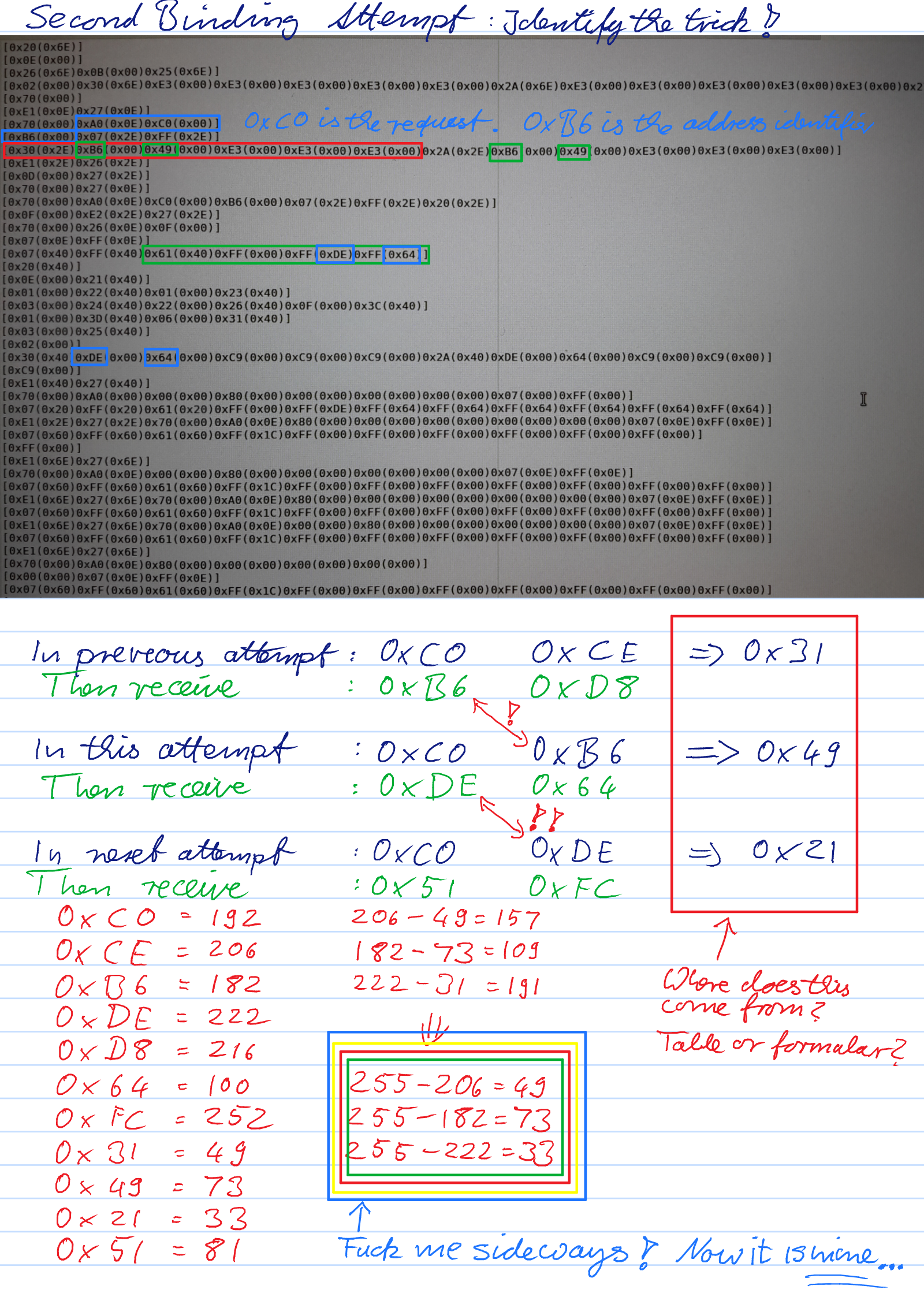
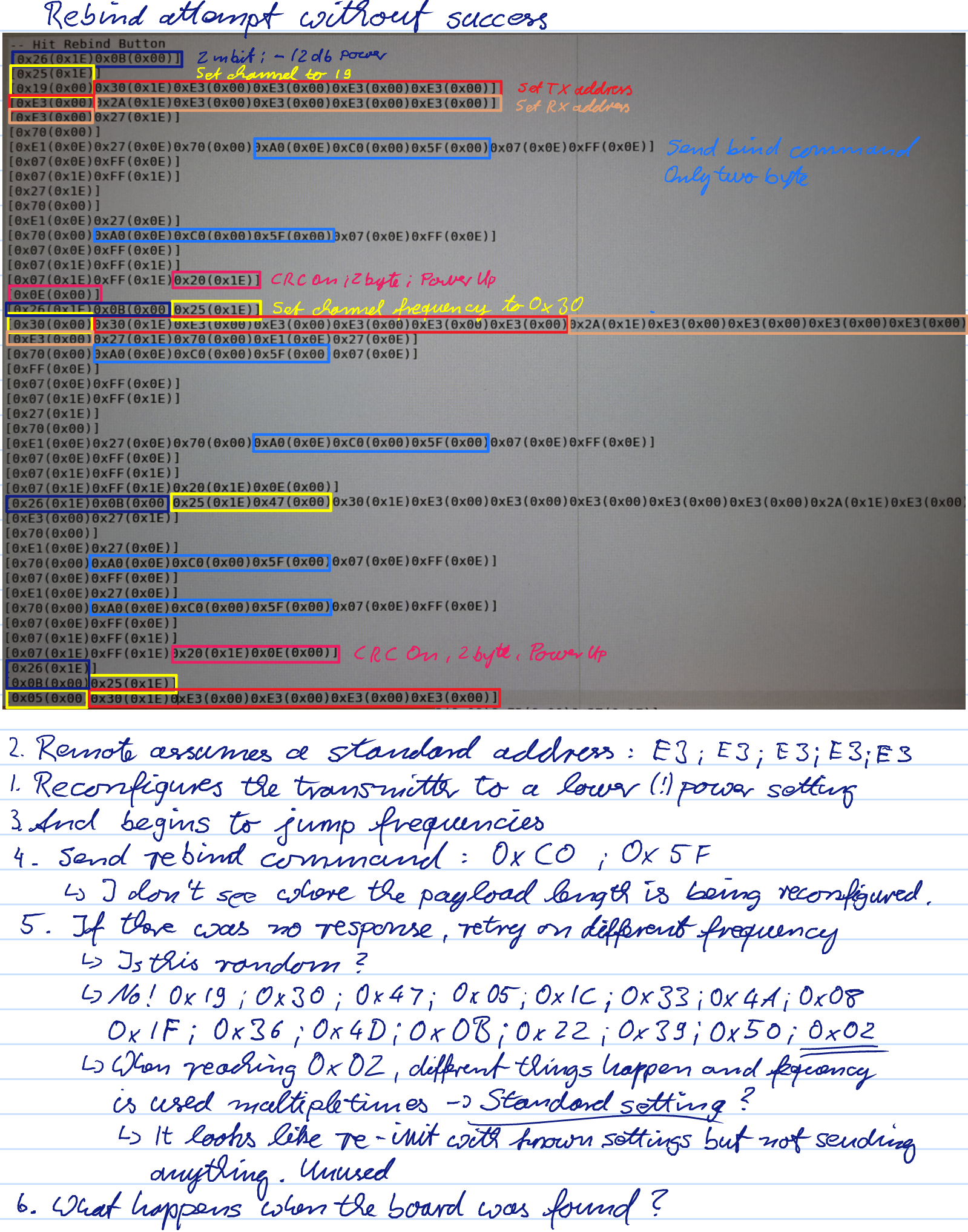
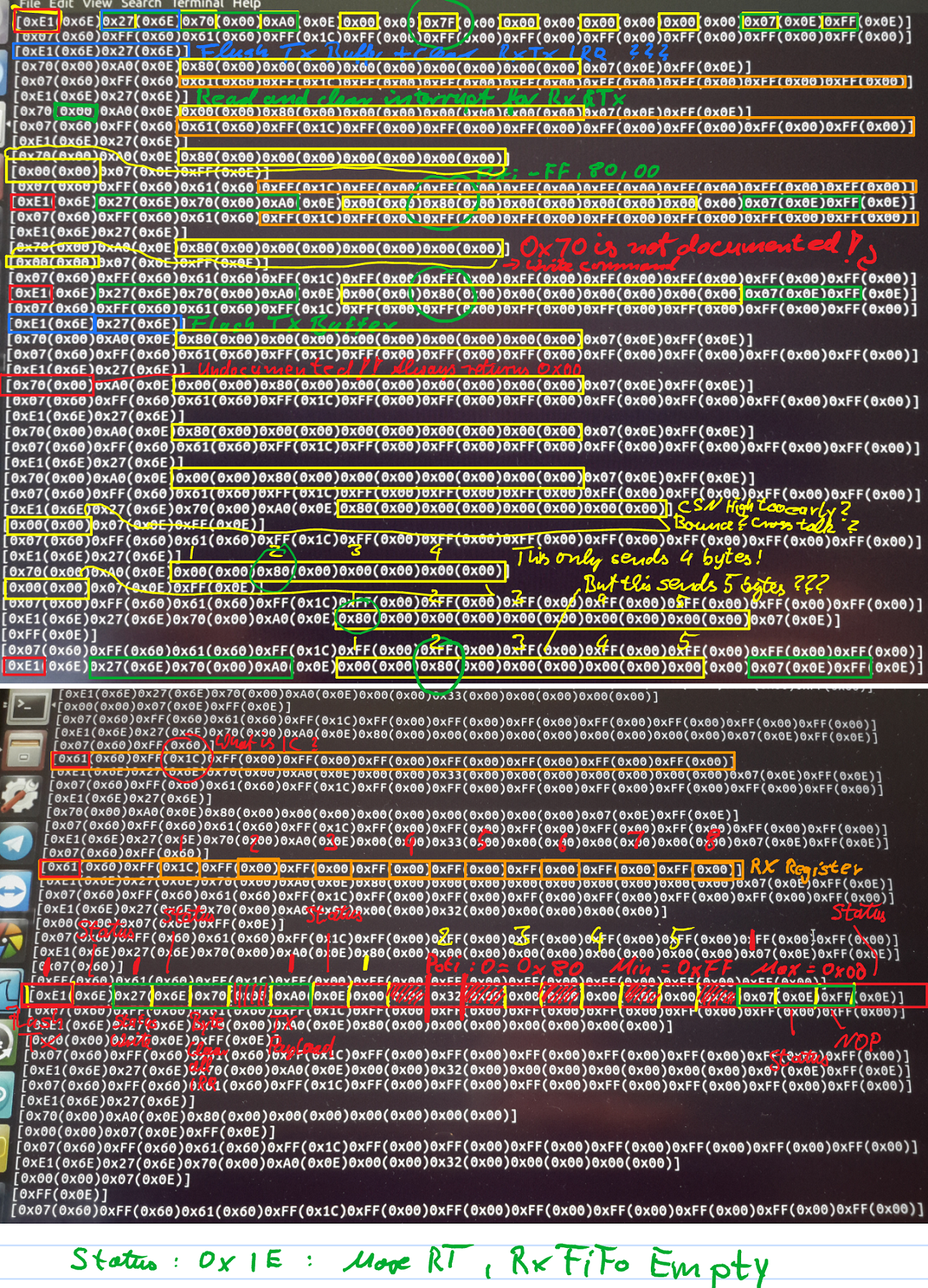
- There are other major issues, that I will mention below when I go into detail about the communication protocol used
In my arrogance and wild feverish dreams I loudly announced my goal to completely reverse engineer this skateboard and take over control of the various bits and pieces. Something I thought I could probably do but had never really done before in great detail on a complex system like this.
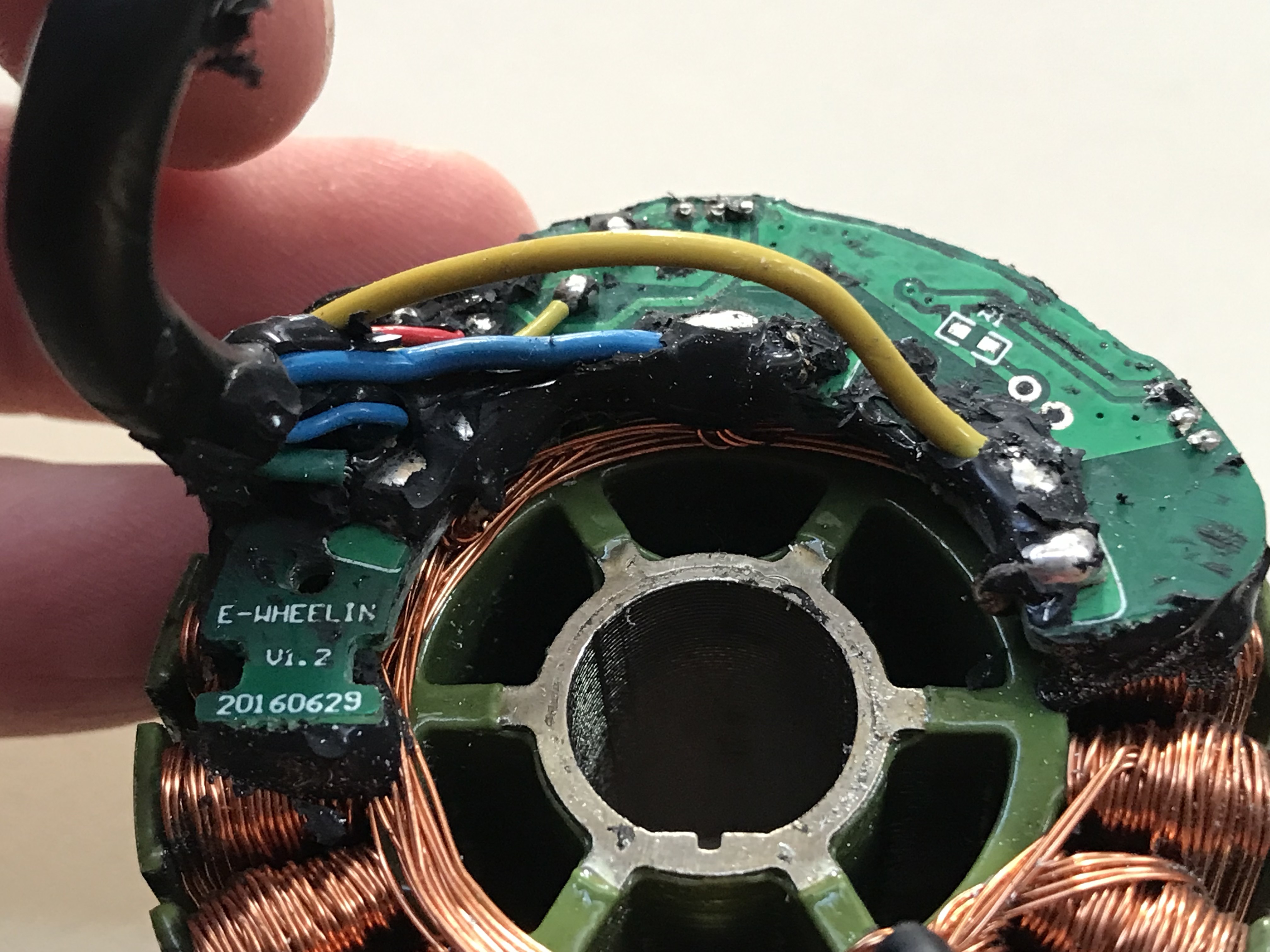
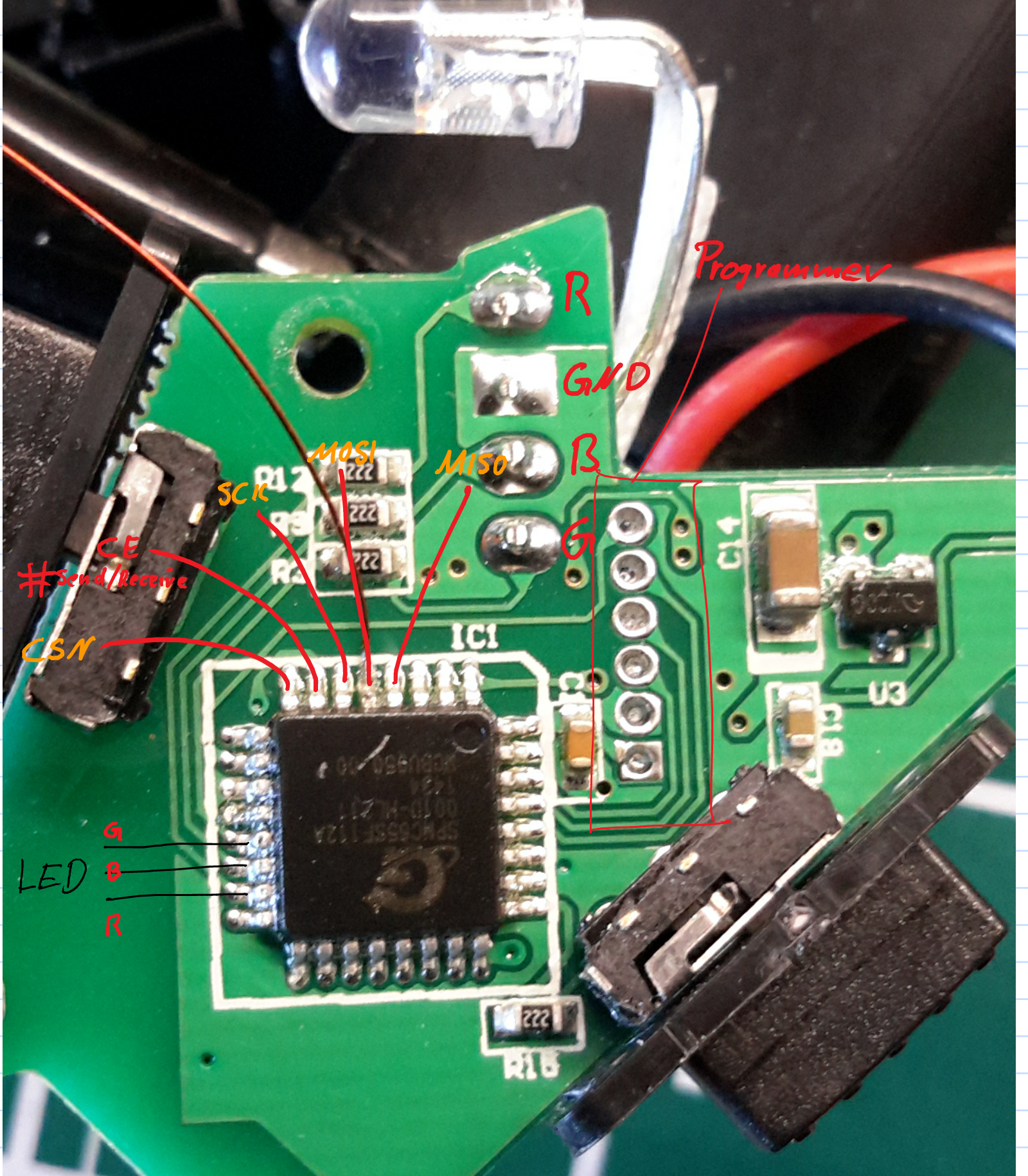
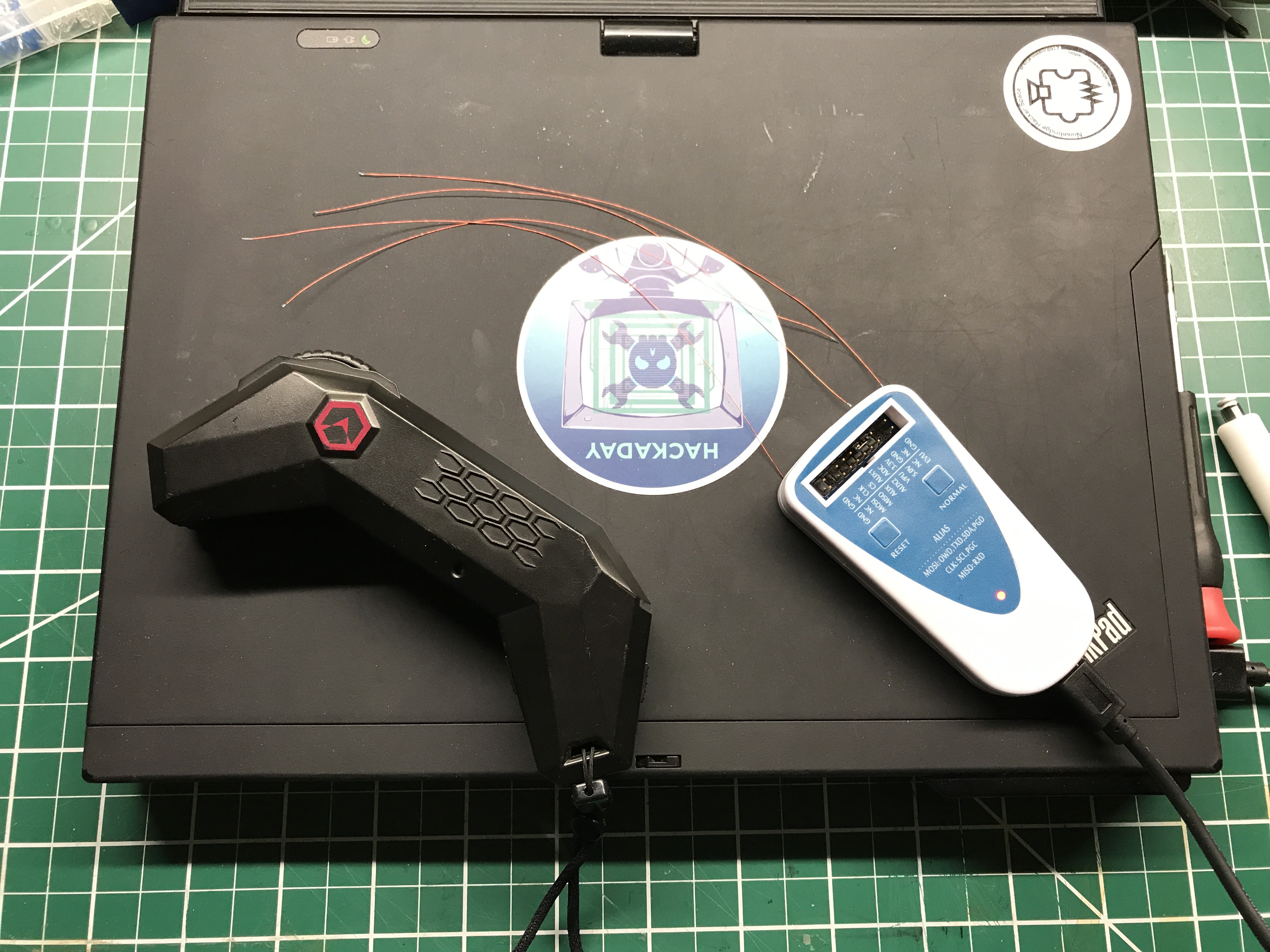
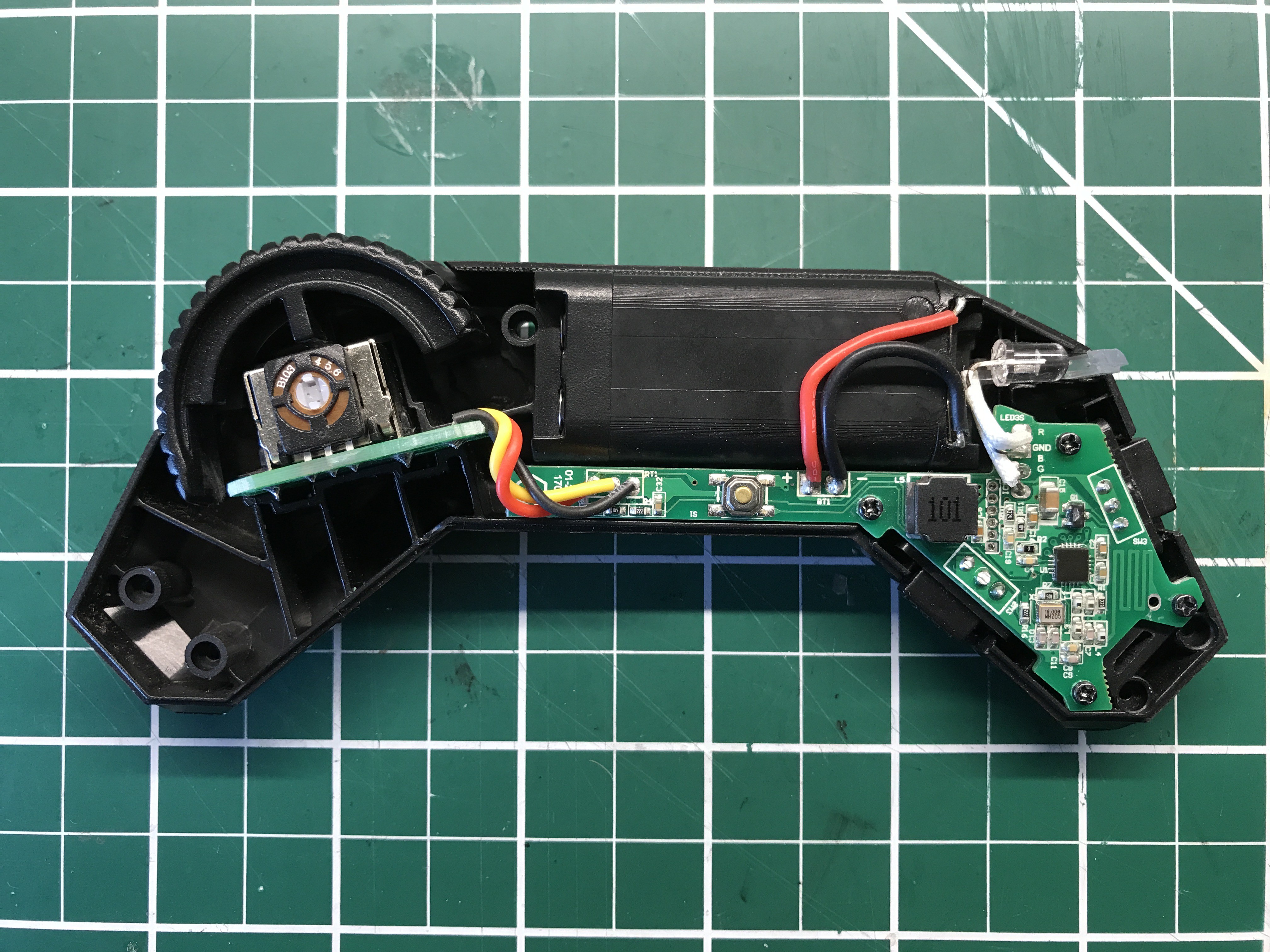
About five weeks after my public announcement, I had enough and took the remote and board apart to look at everything, take a ton of pictures and start with searching for chip datasheets. With only two hits, I was pretty disappointed to realize, I'll not be able to take over these Chinese micro processors that are produced by the thousands and have absolutely no description at all!
However, I had two very dominant hits, that made this process possible:
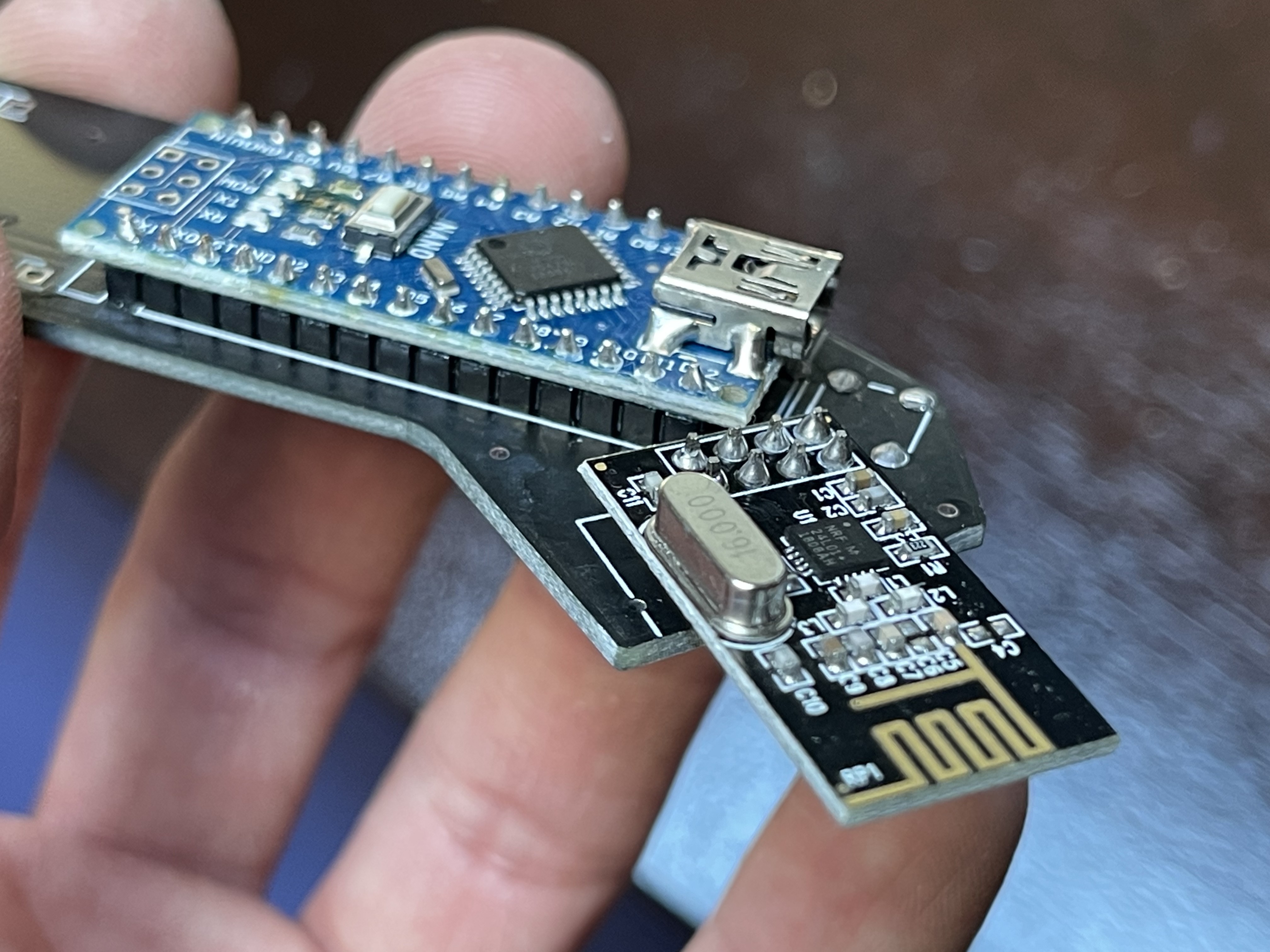
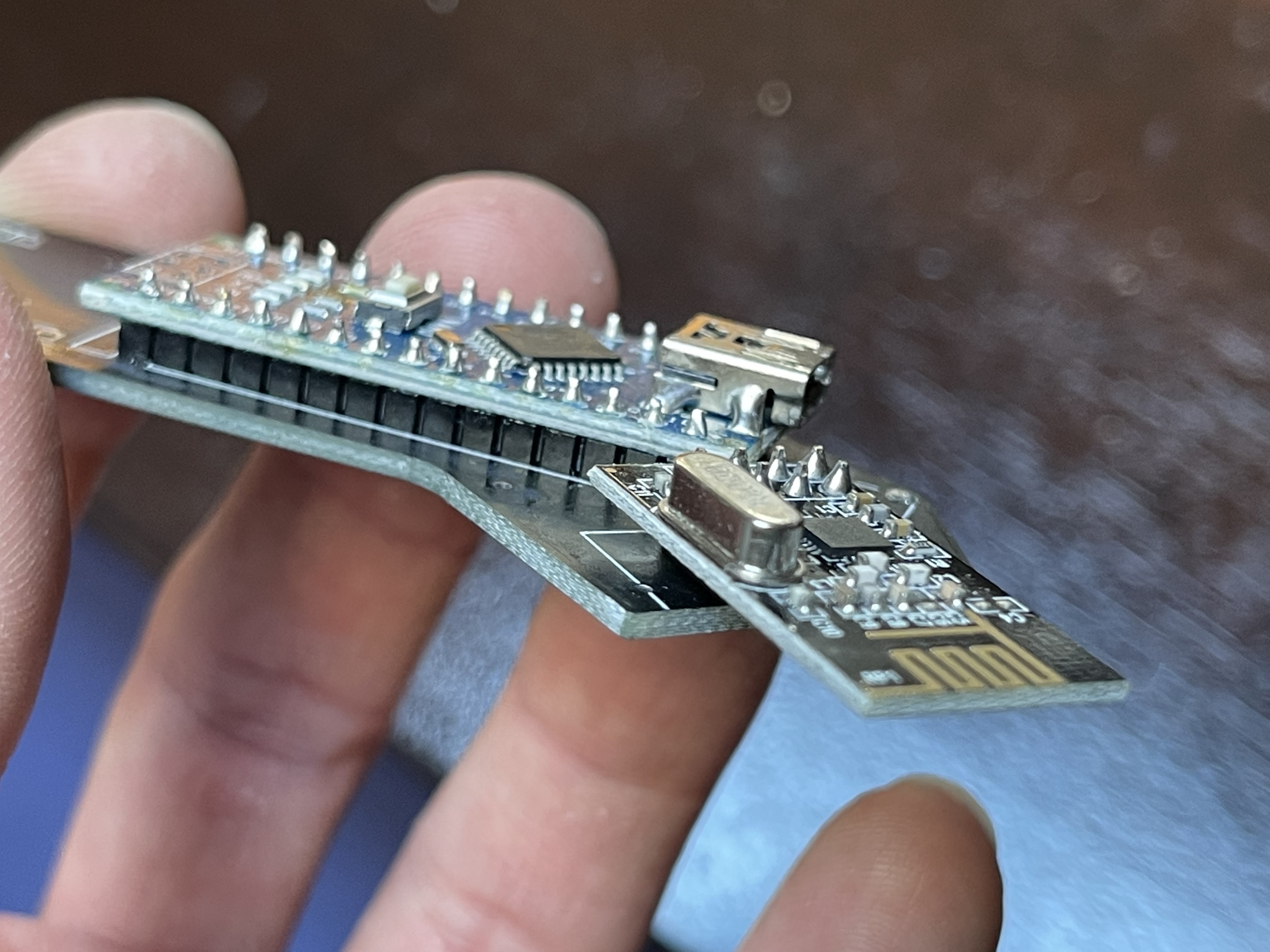
- The wireless communication chip NRF24L01+ used in both, the remote as wel as the receiving end on the board
- The wireless bluetooth chip used for communication with the smartphone app
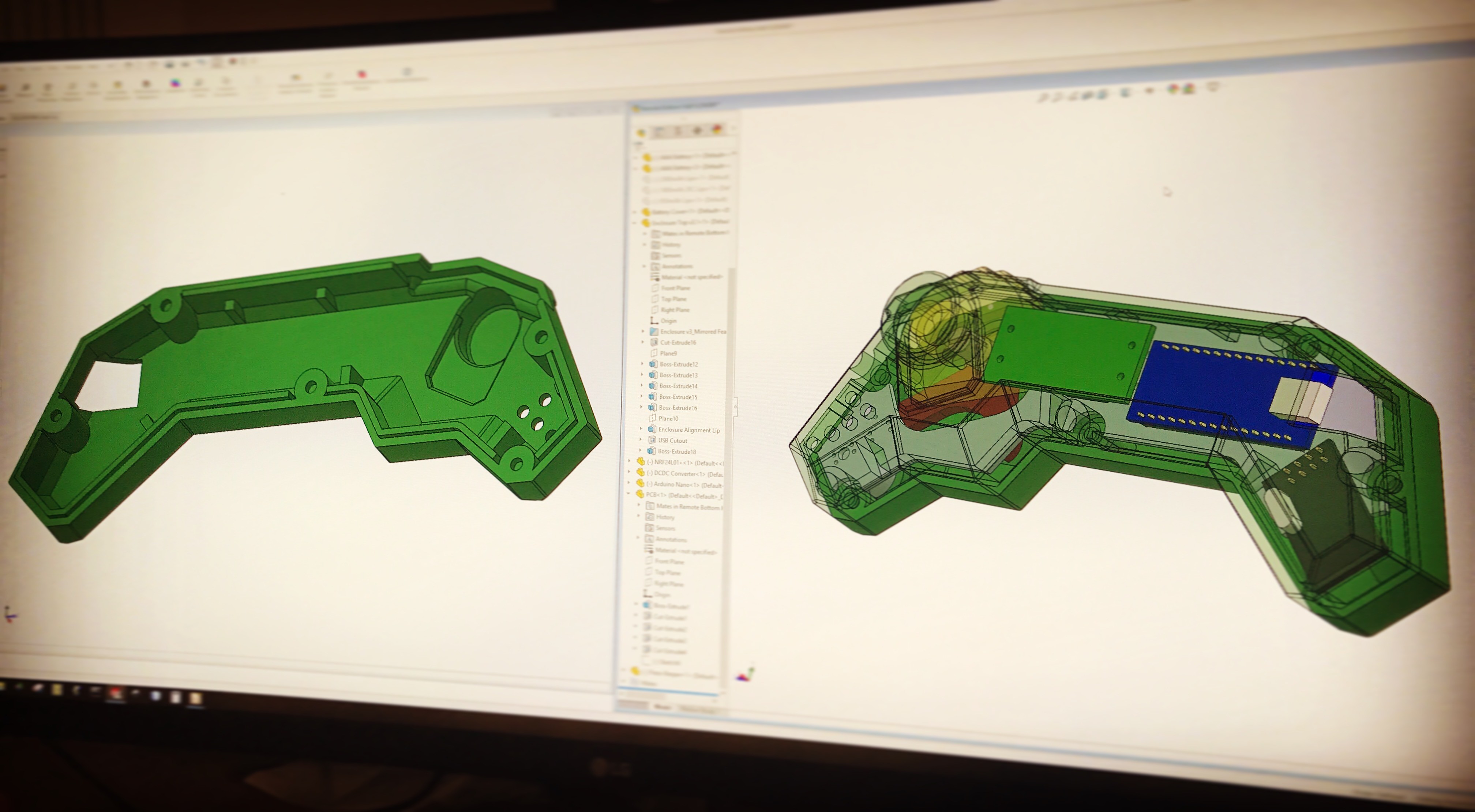
Apart from learning a lot during this process, I managed to reverse engineer the entire wireless communication protocol, write code around it to handle pairing and general communication, design my own custom electronics, enclosure and throttle mechanism and bring it all together using my PCB mill as well as my 3D printer.
This logbook is an aftermath of the steps I took and the success and fun I had doing this project.
The project documentation is work in progress even though version 1 of this remote works very well and already has 200 miles on its back without a single failure or disconnect.
The STL files can be found on my Thingiverse project page: https://www.thingiverse.com/thing:3273537
The code can be found in my GitHub repository: https://github.com/McNugget6750/Open-esk8-Remote
 However, I had a pretty big crash in 2018 and the remote took a pretty brutal hit with my entire body weight being smashed into the remote. To my big surprise, it took the hit well and even complained that it wasn't connected to the board anymore when I was able to perceive my surroundings again.
However, I had a pretty big crash in 2018 and the remote took a pretty brutal hit with my entire body weight being smashed into the remote. To my big surprise, it took the hit well and even complained that it wasn't connected to the board anymore when I was able to perceive my surroundings again.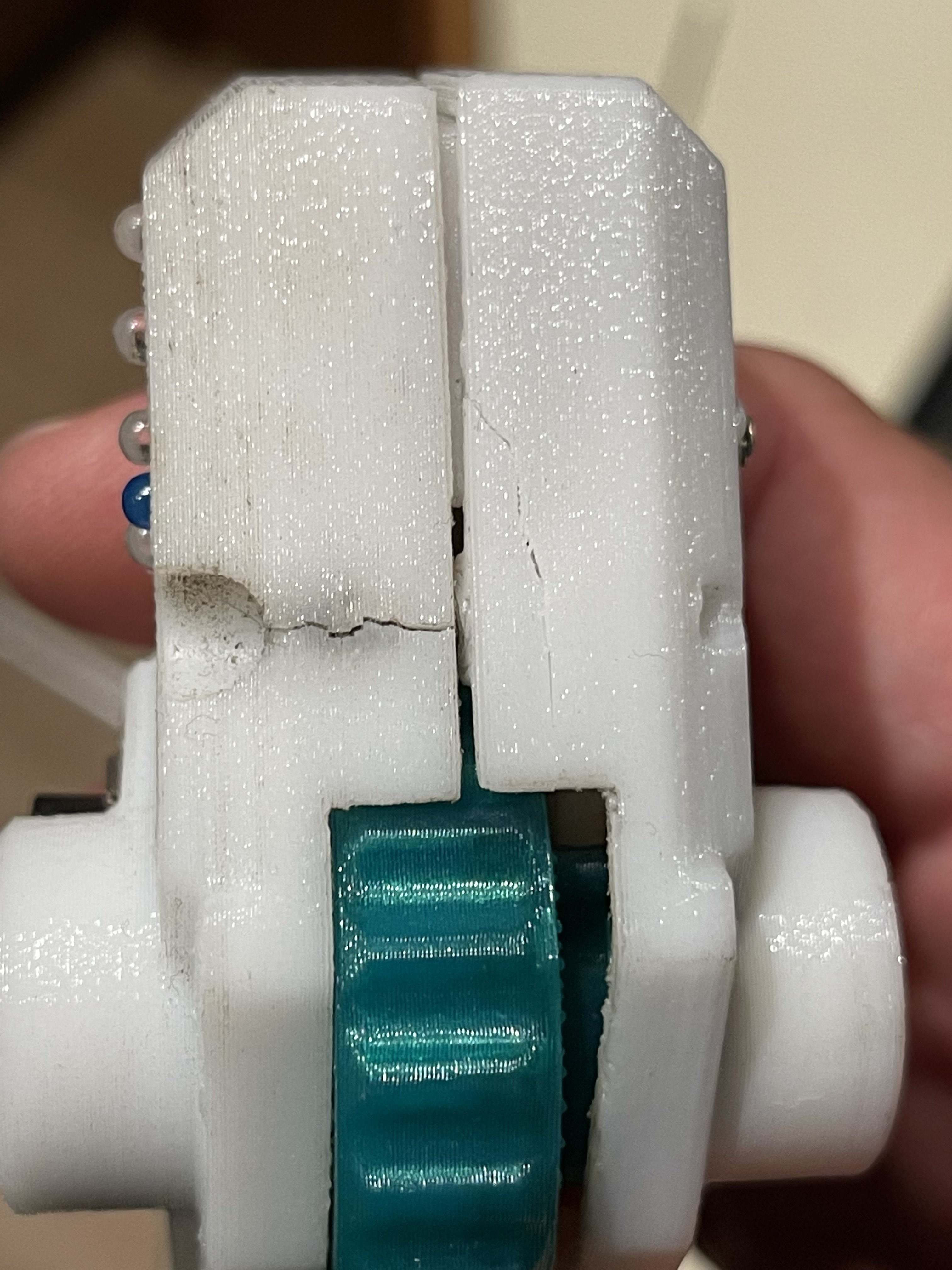

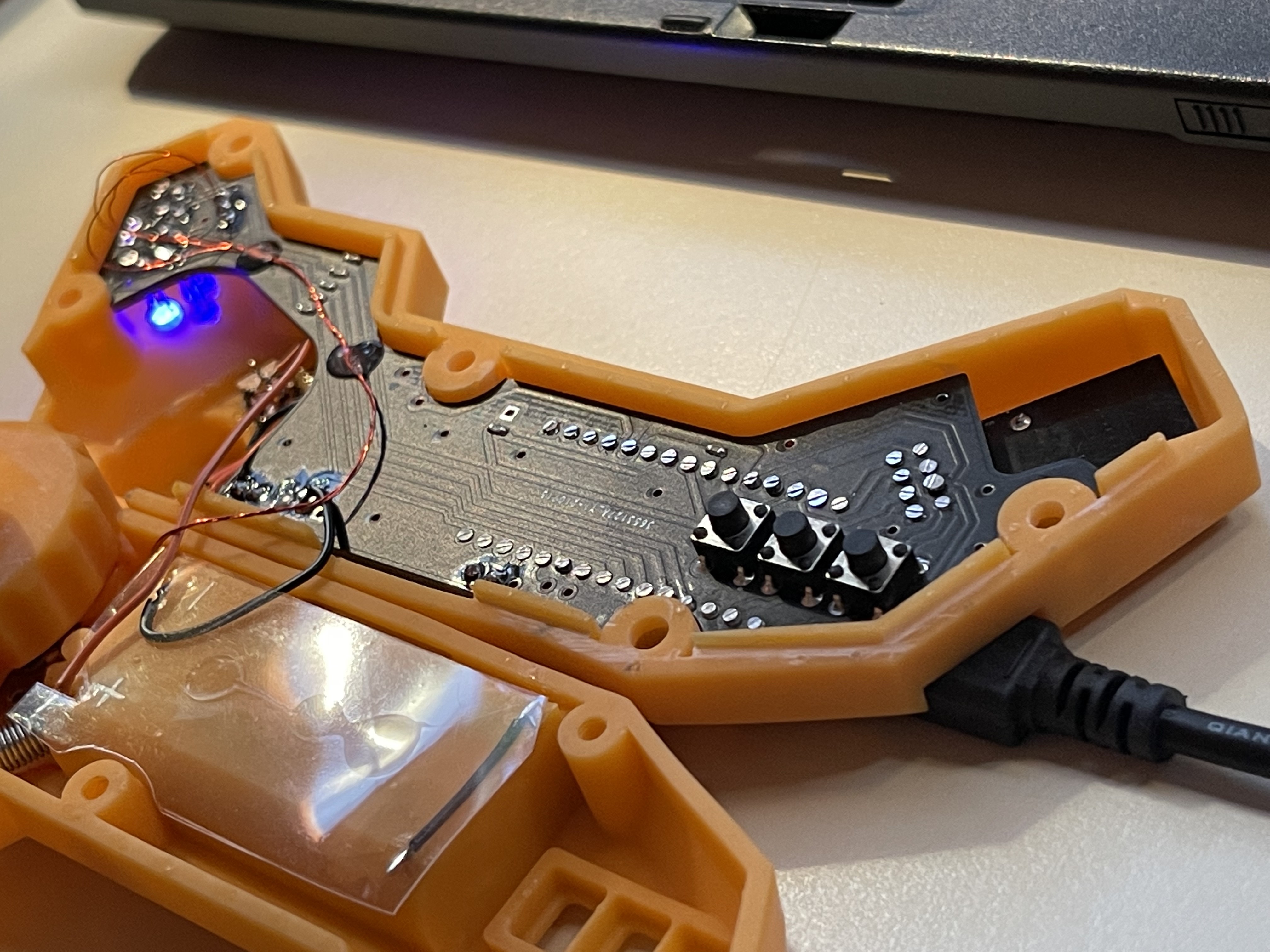
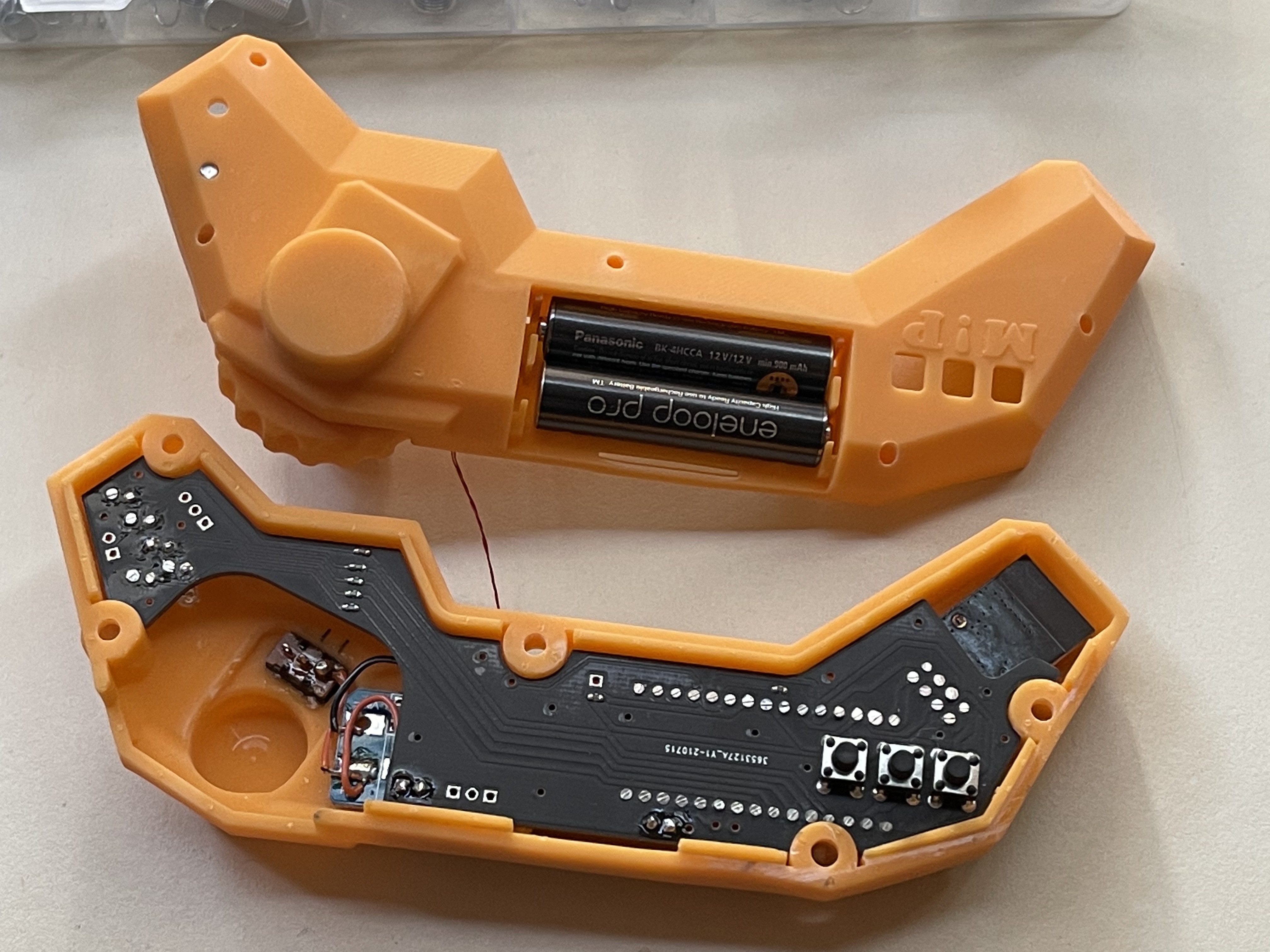
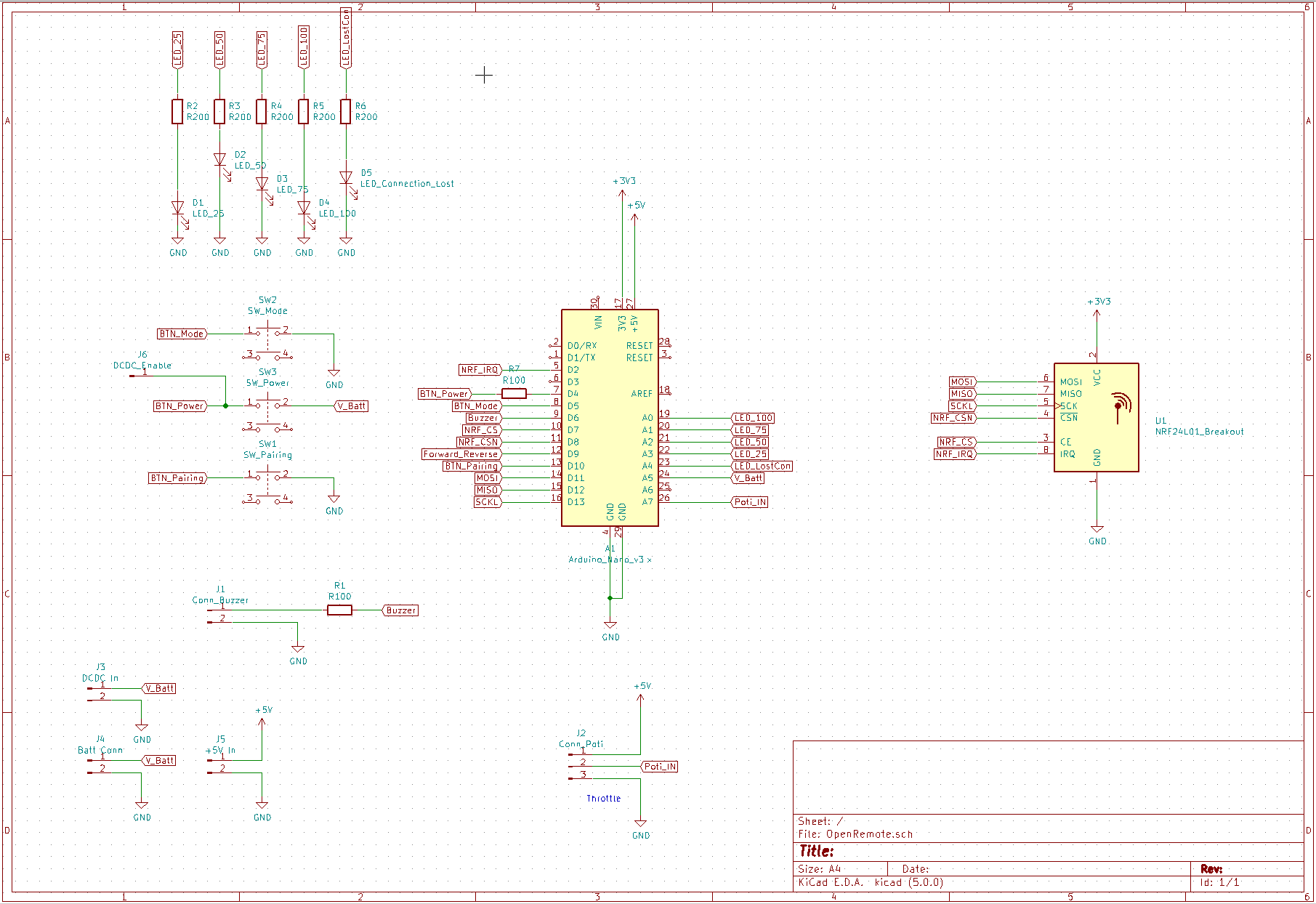
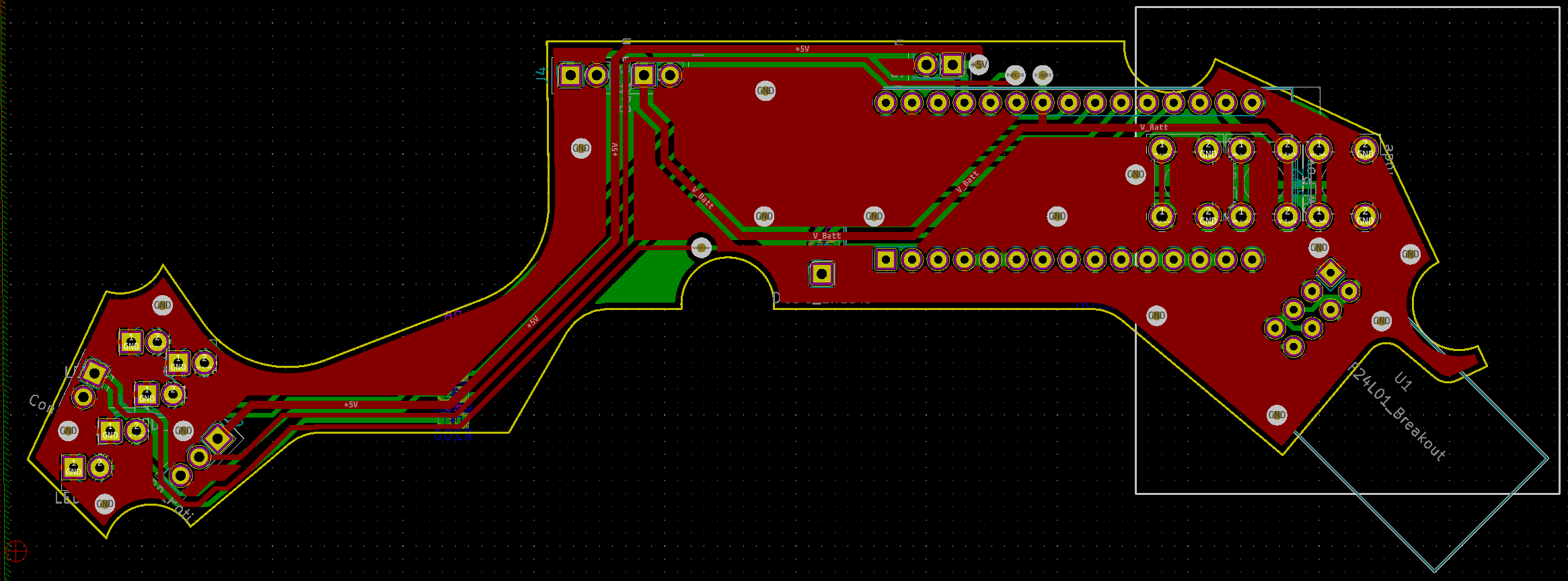
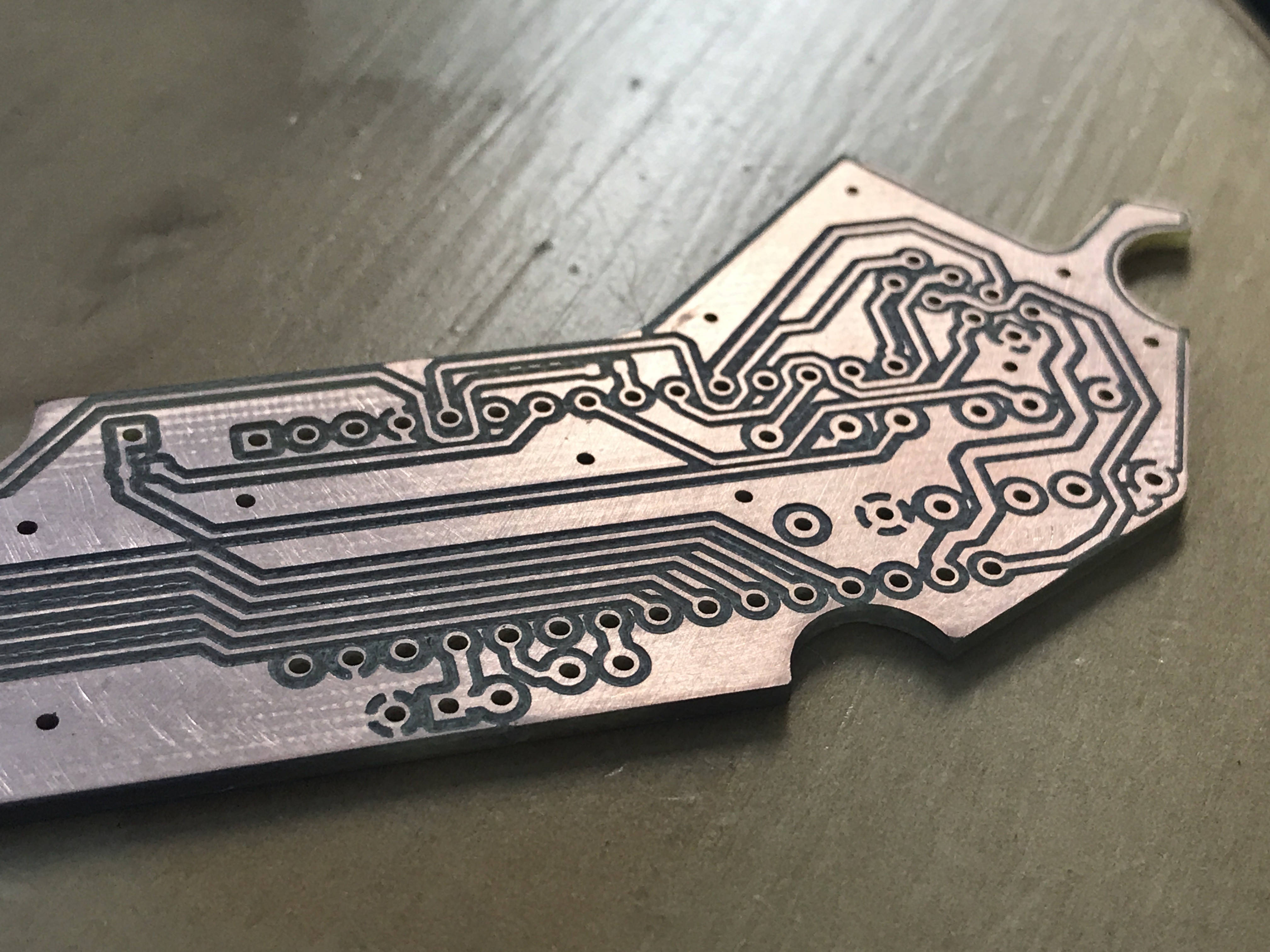
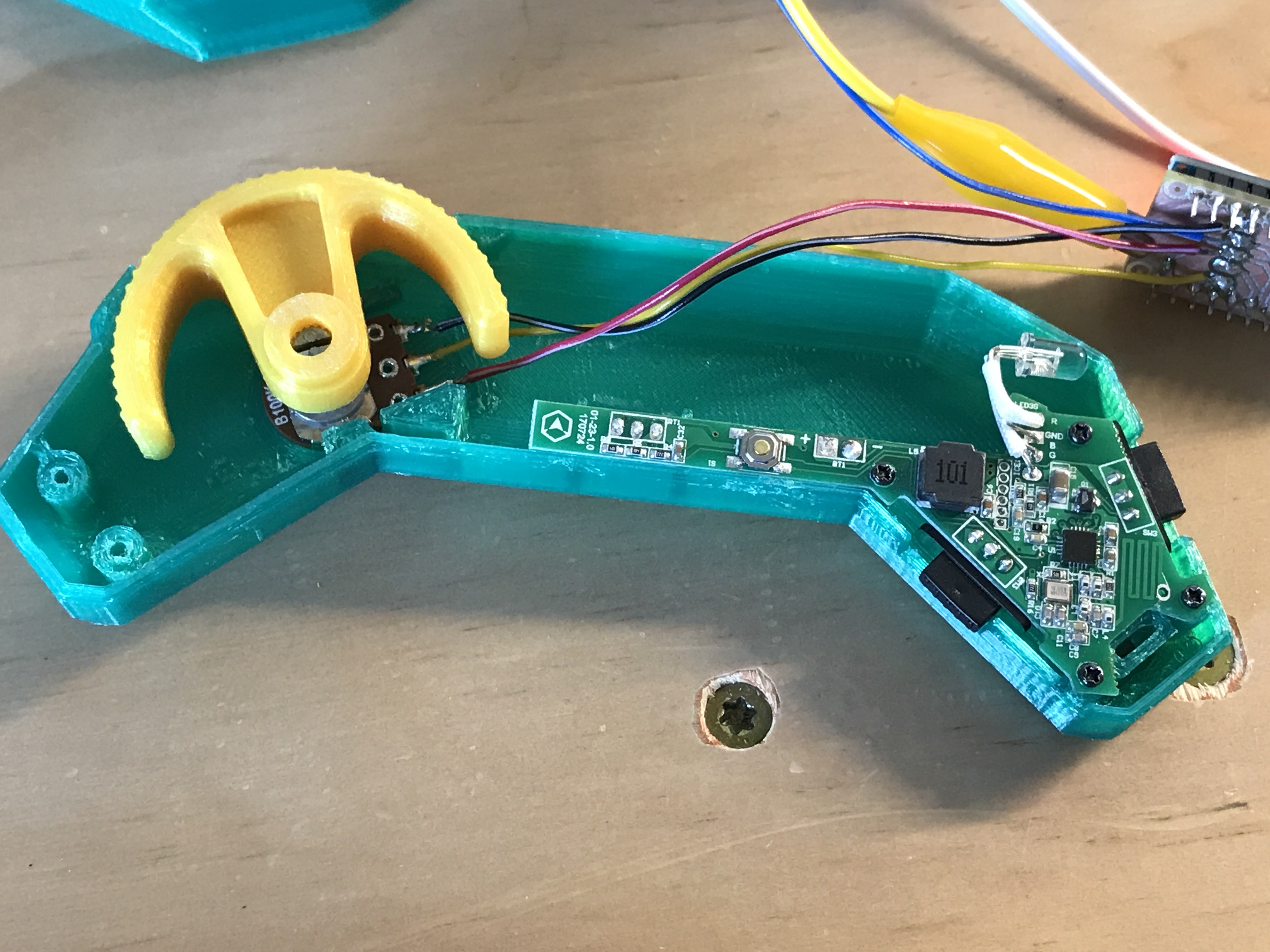
 I decided to add some minor updates to the PCB and change a few wires around but nothing major changed. All pin assignments are still the same as I wanted to maintain compatibility to my previous version.
I decided to add some minor updates to the PCB and change a few wires around but nothing major changed. All pin assignments are still the same as I wanted to maintain compatibility to my previous version.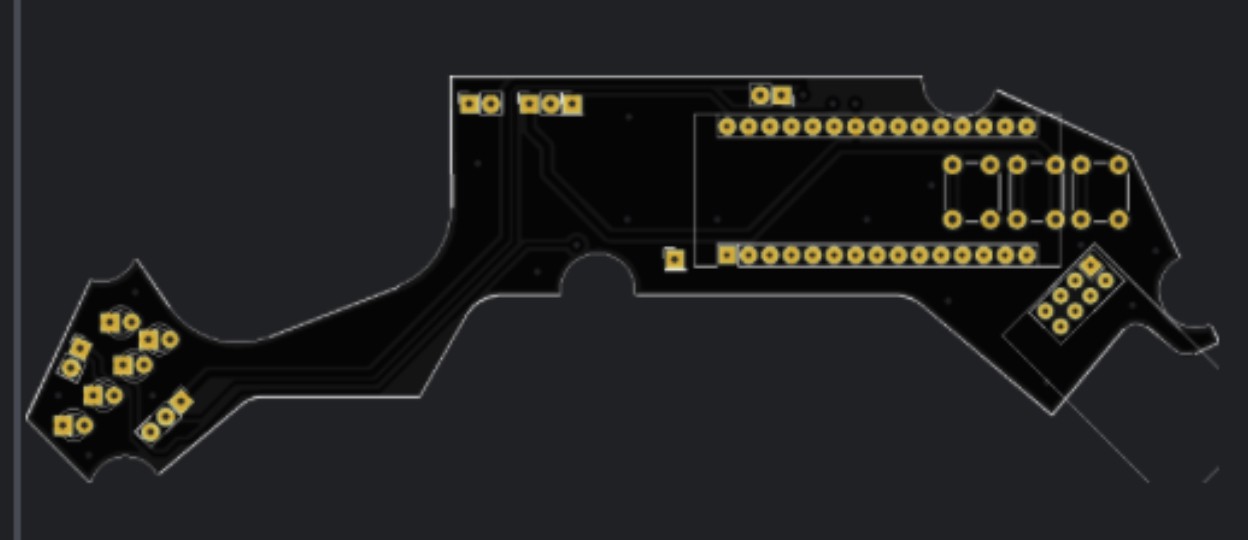


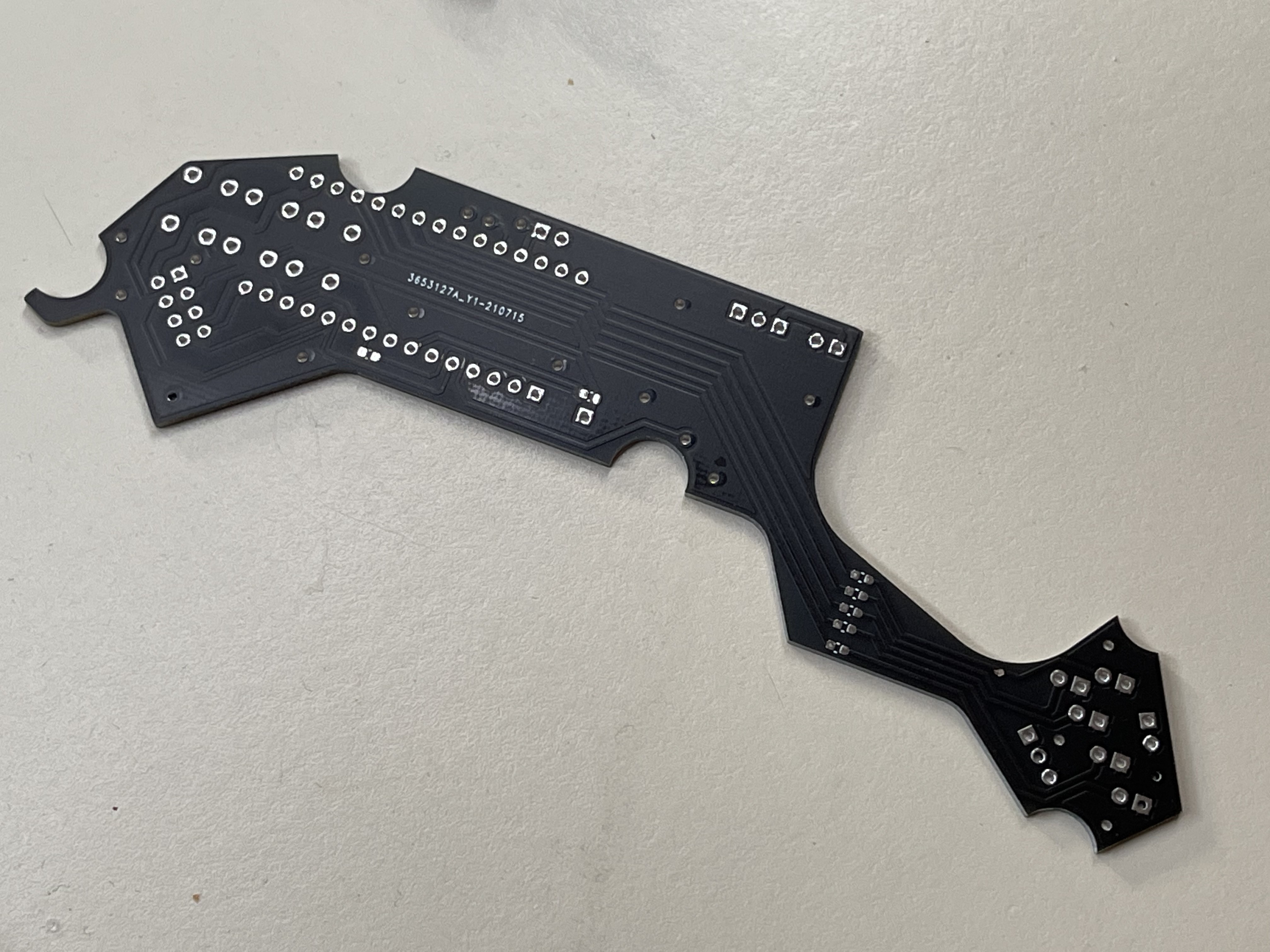
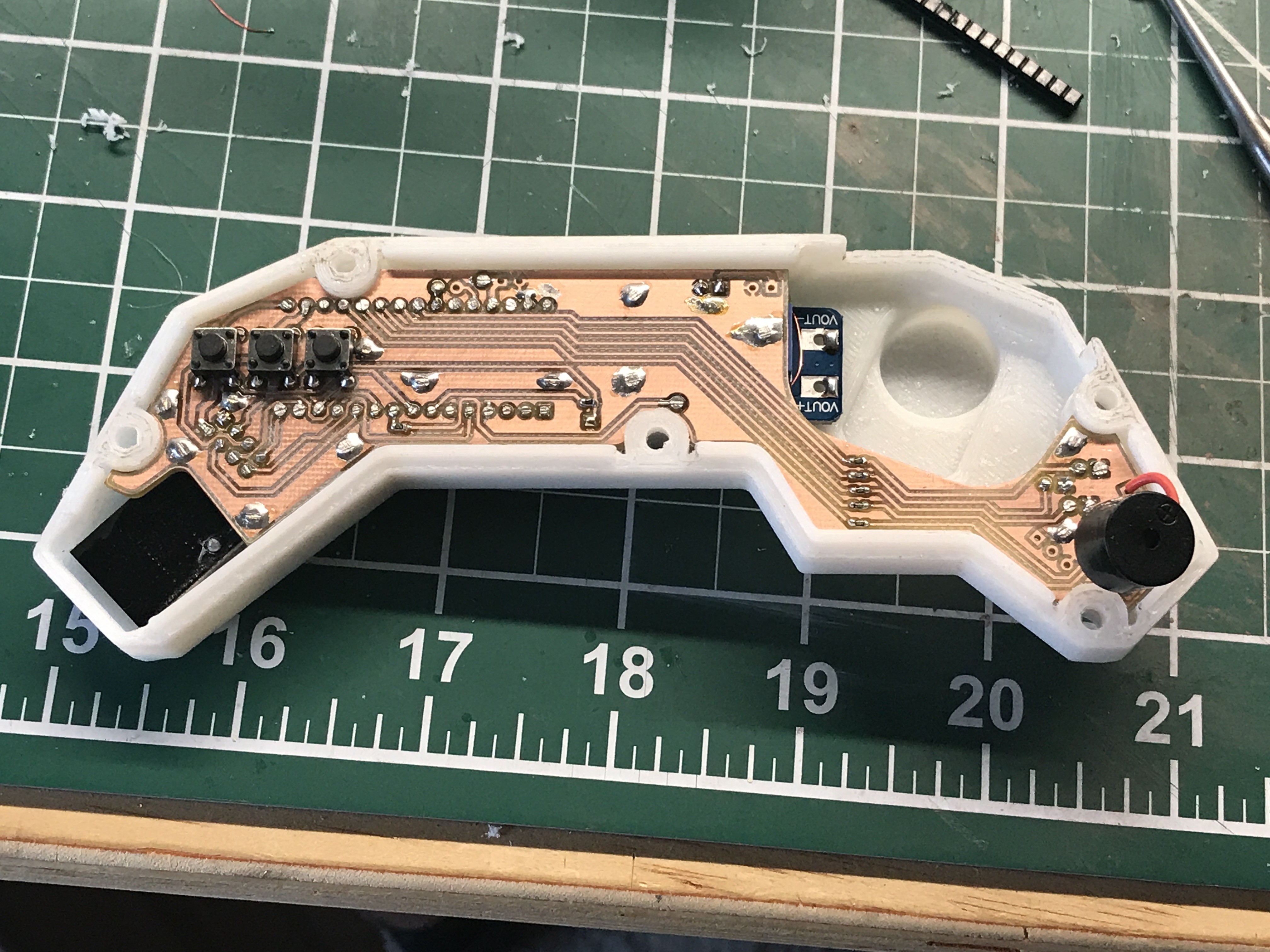
 Have you ever seen something this pretty in your life? Well okey, I show myself out....
Have you ever seen something this pretty in your life? Well okey, I show myself out....
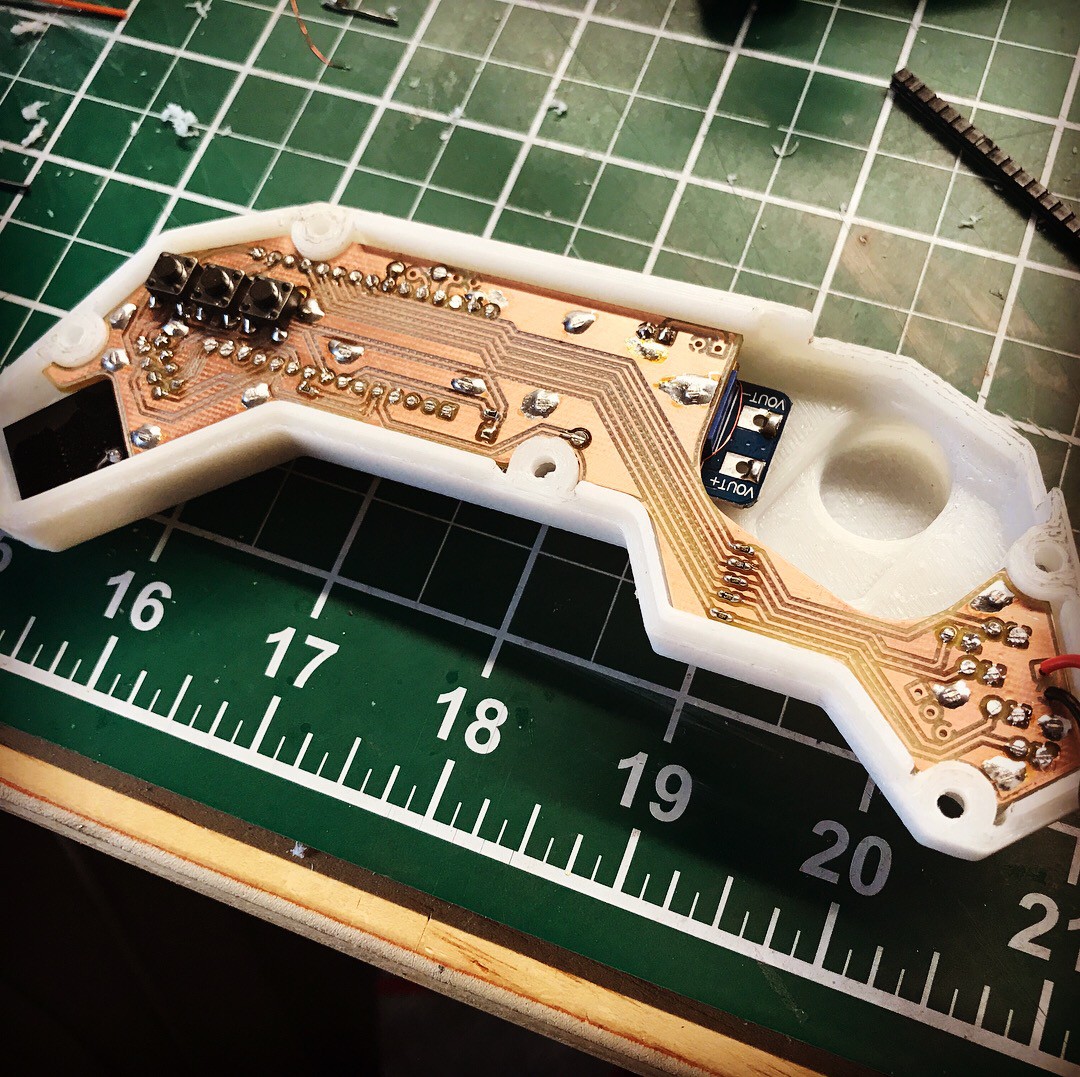
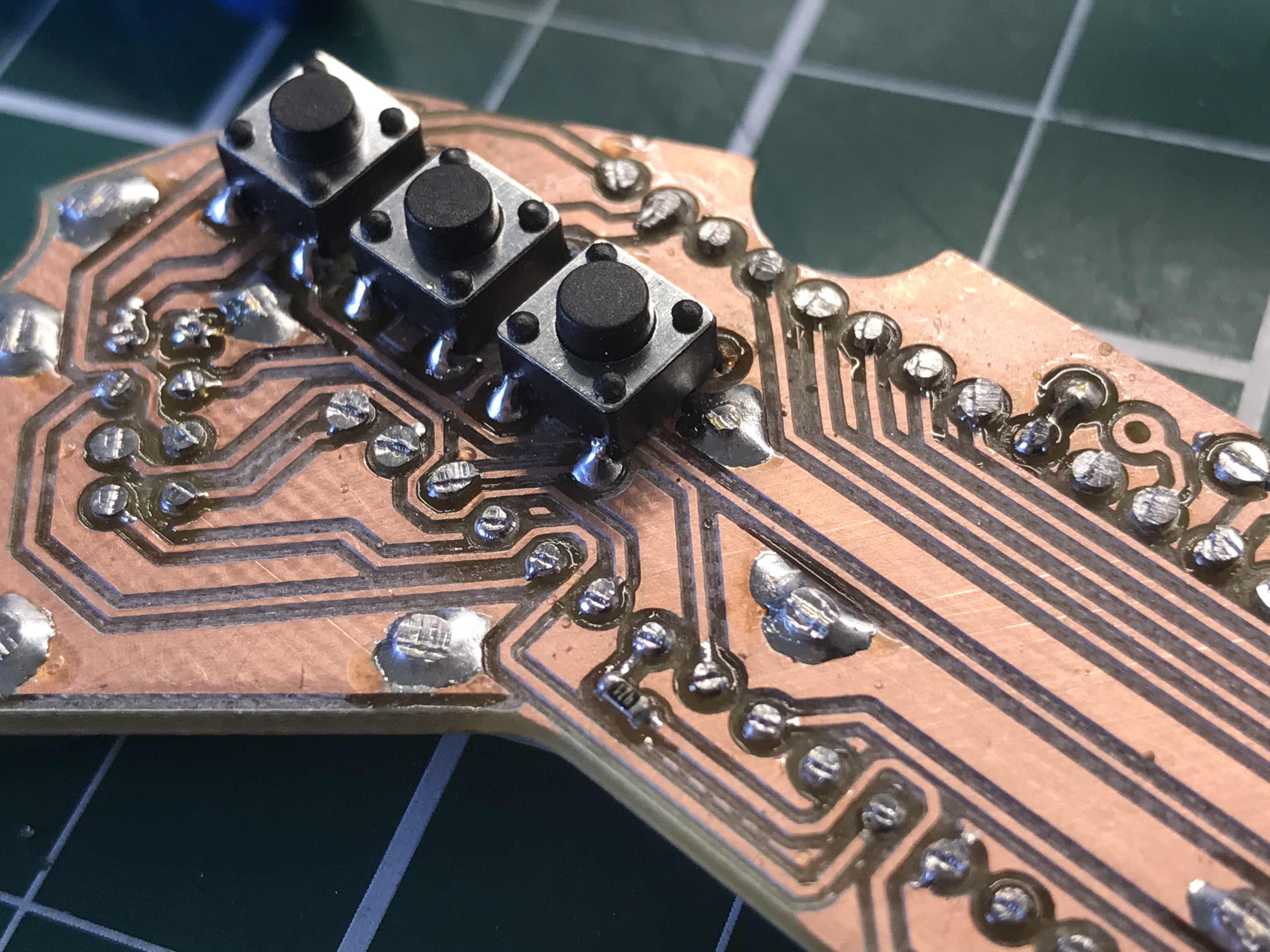
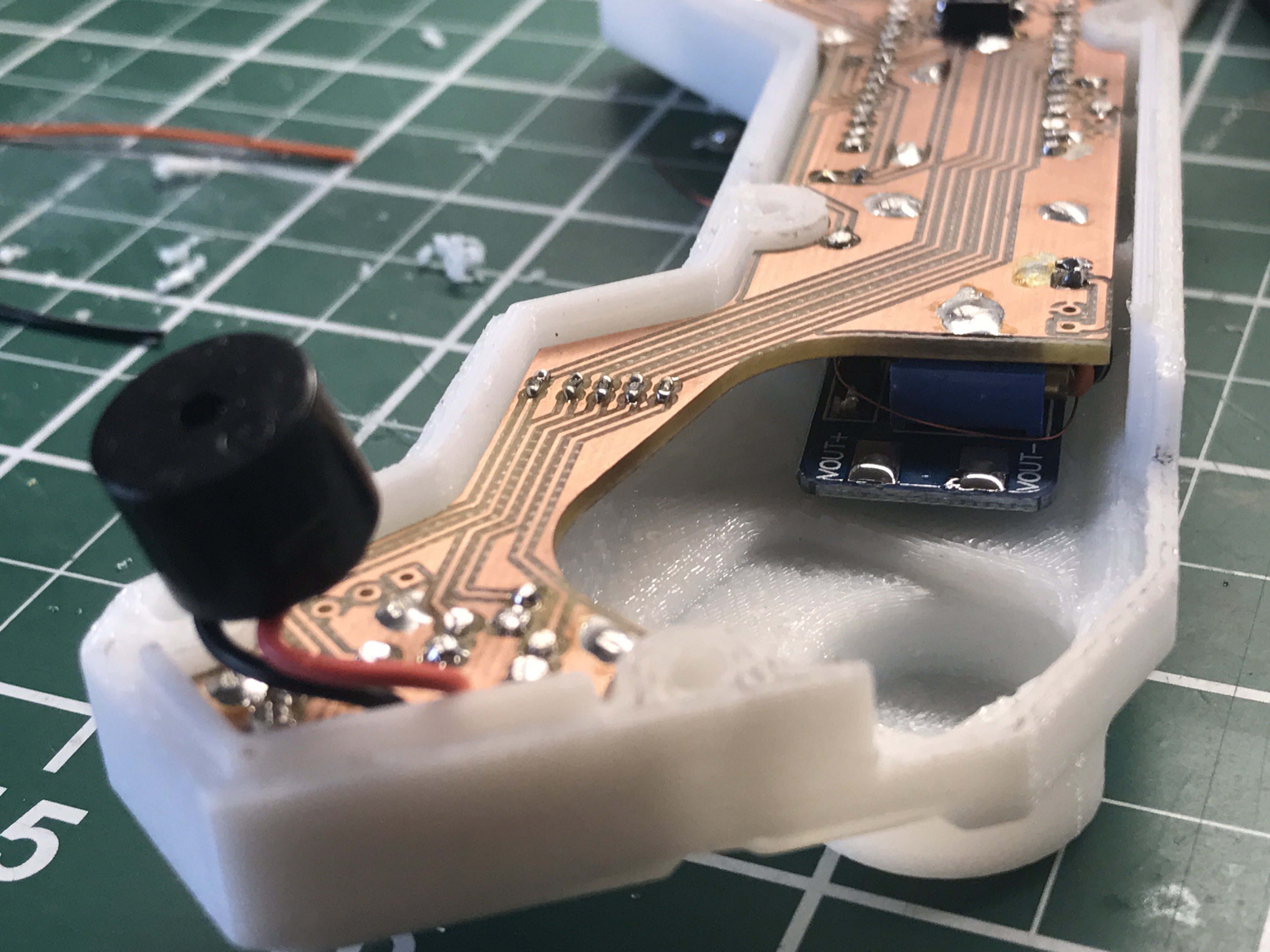
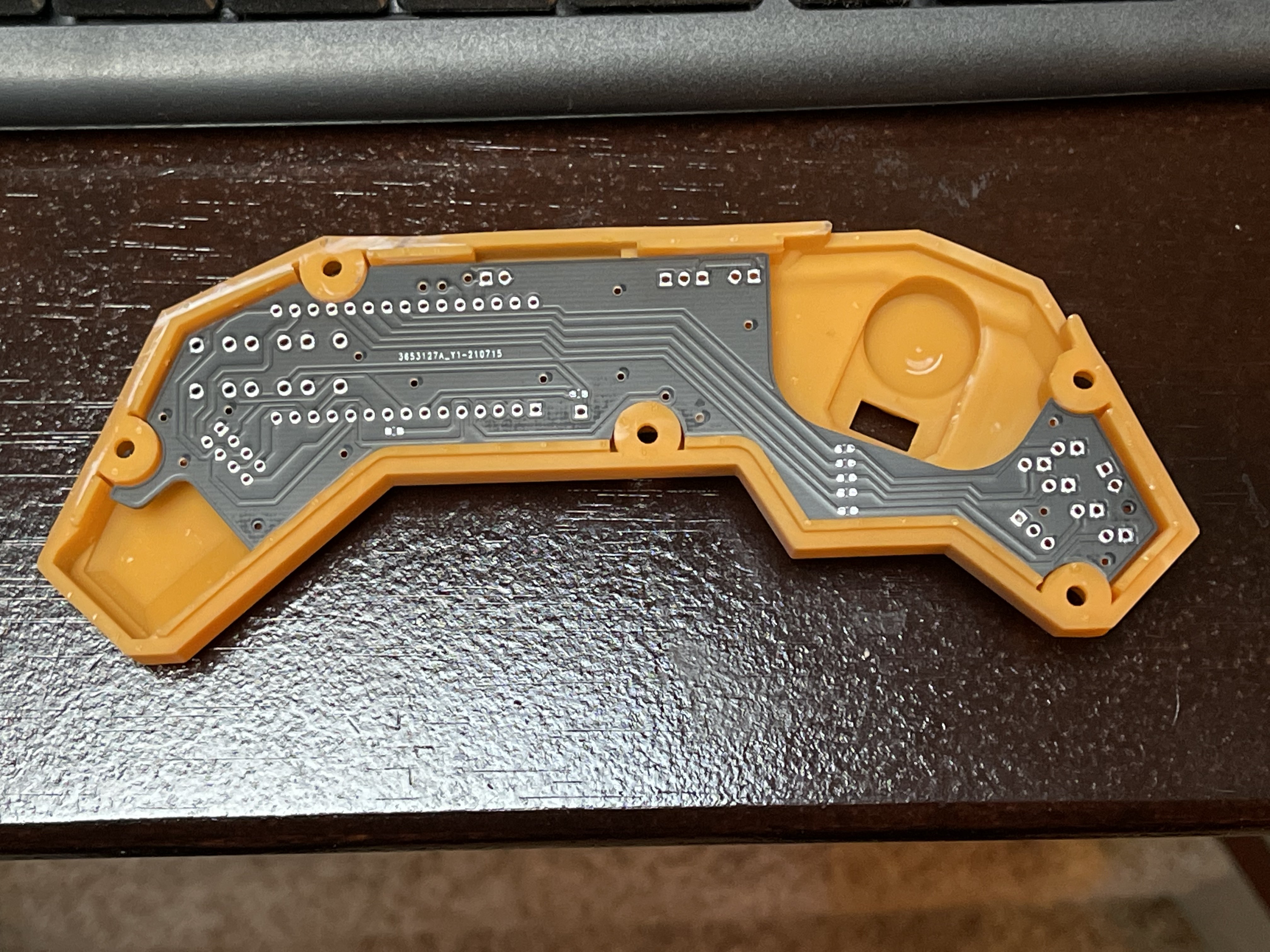 Some more sanding and the throttle potentiometer also fit into its seat.
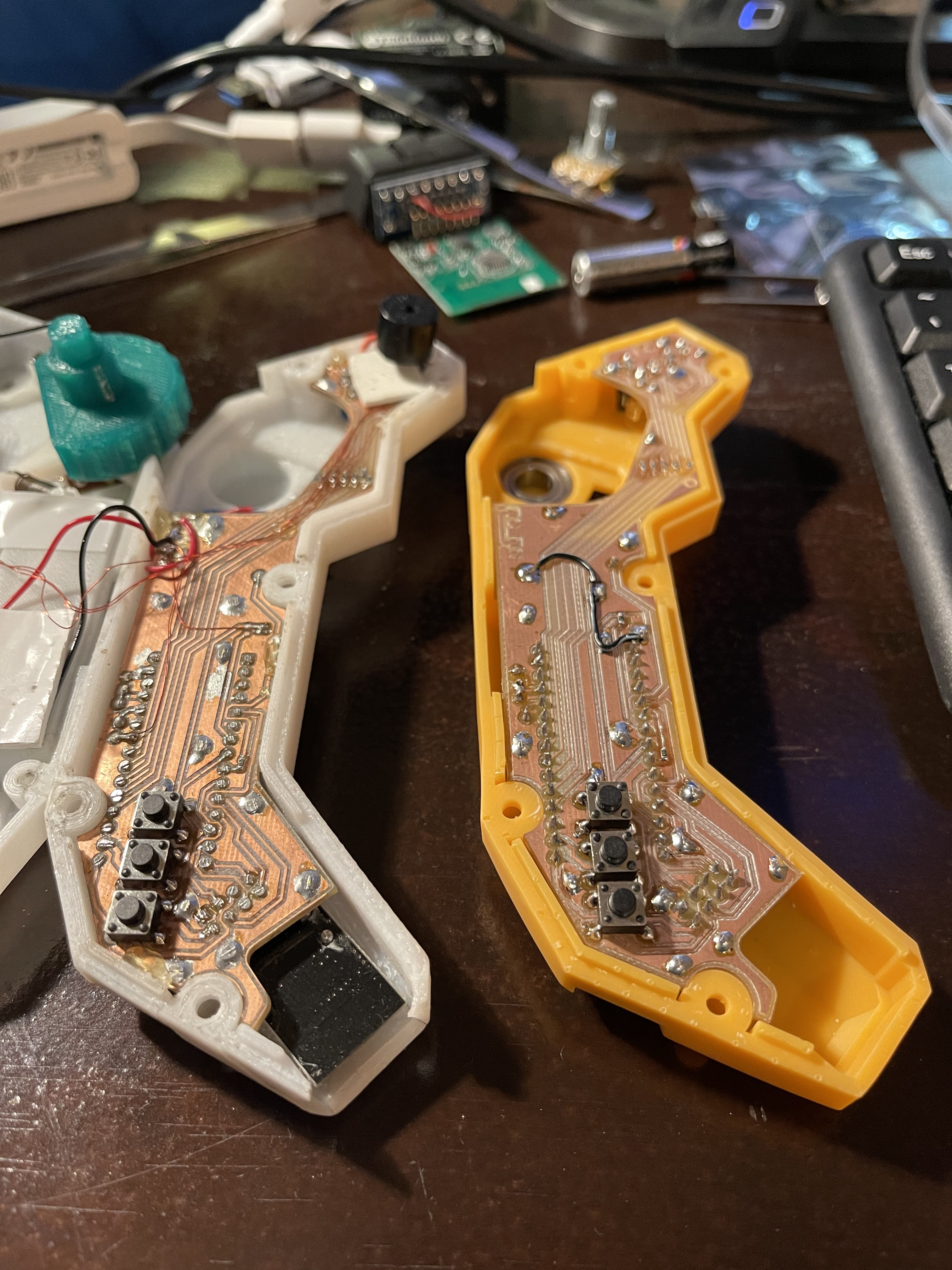
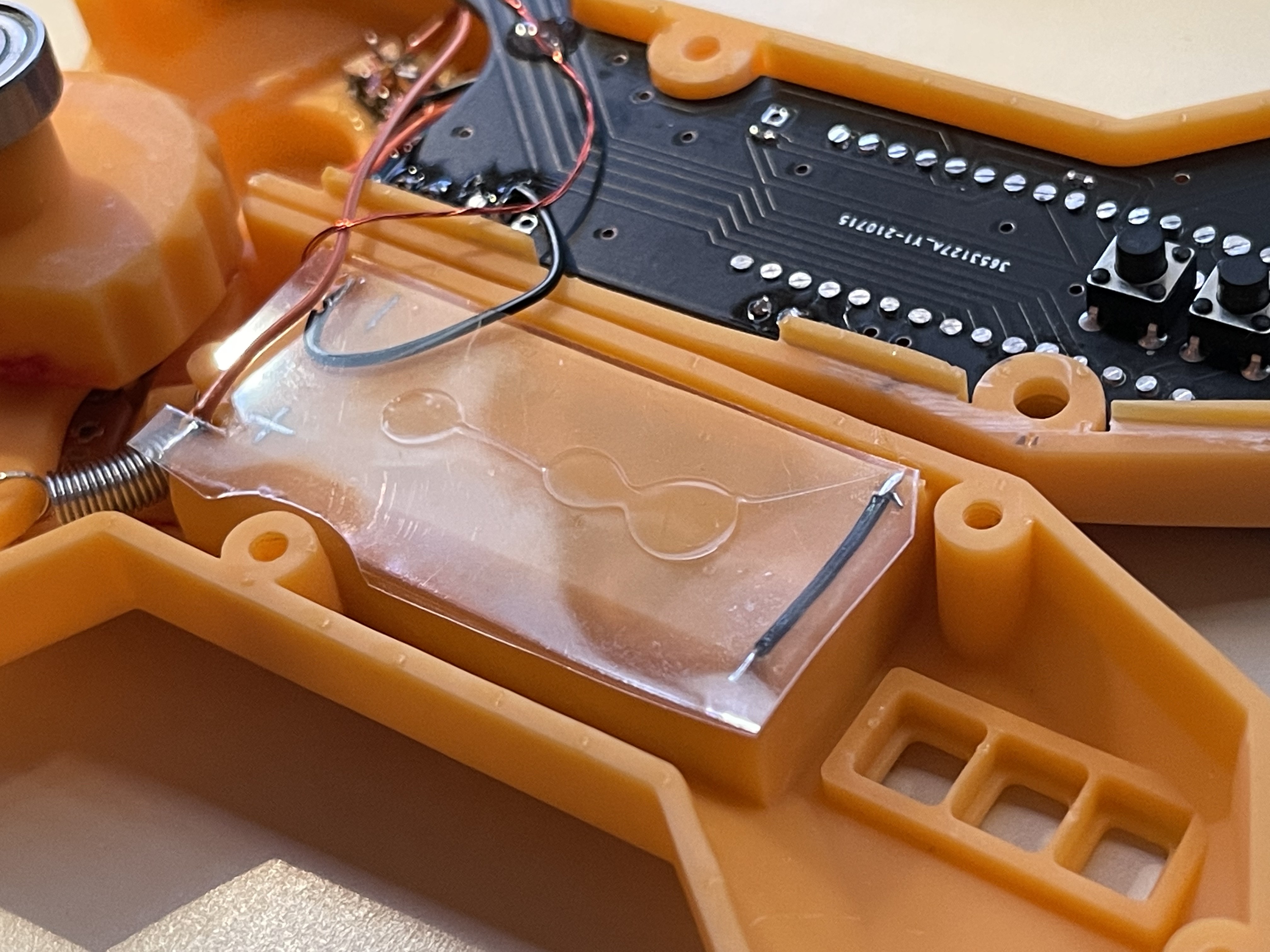
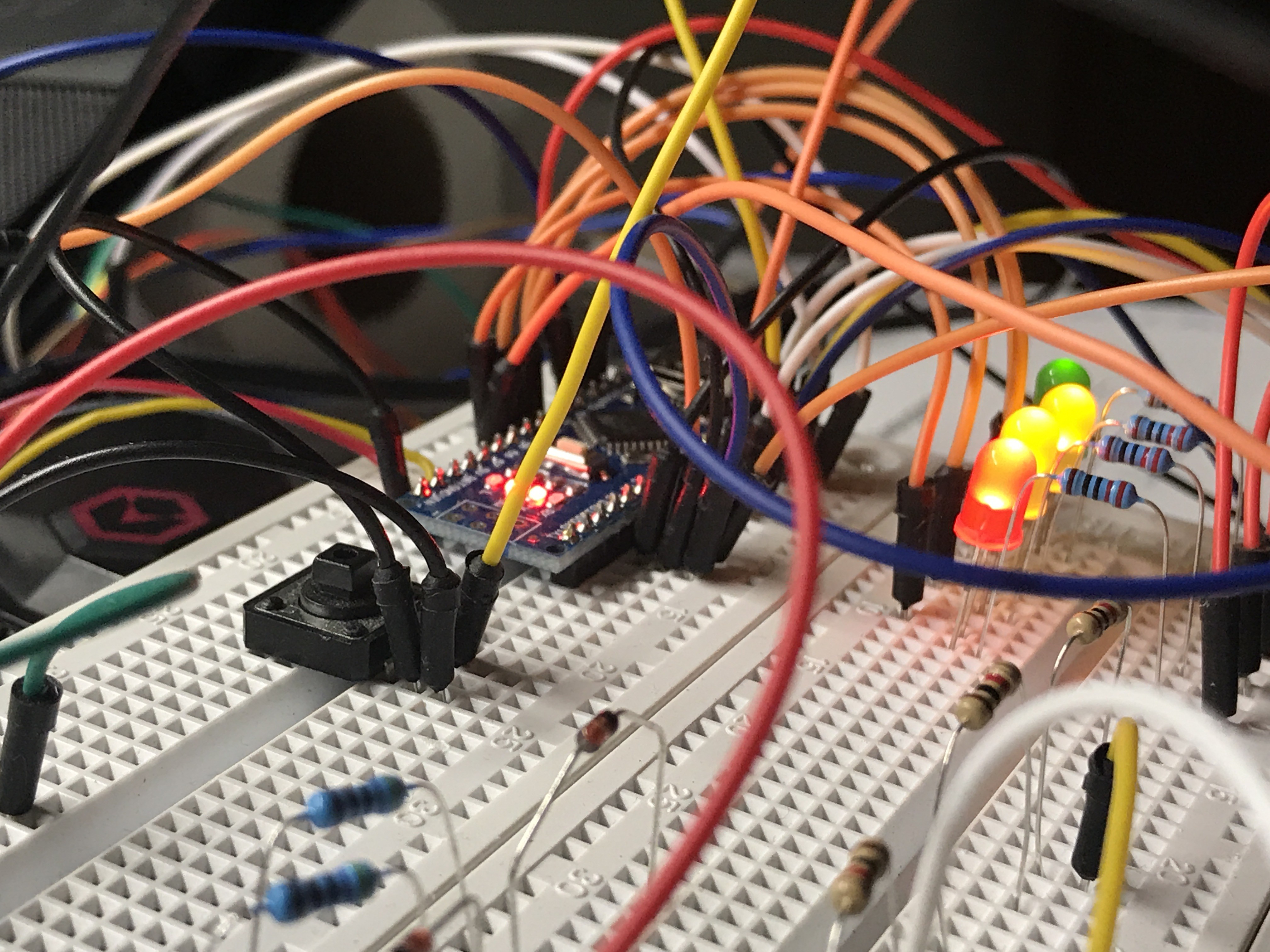
Some more sanding and the throttle potentiometer also fit into its seat. The board itself was quickly assembled now that I had the convenience of solder masks.
The board itself was quickly assembled now that I had the convenience of solder masks.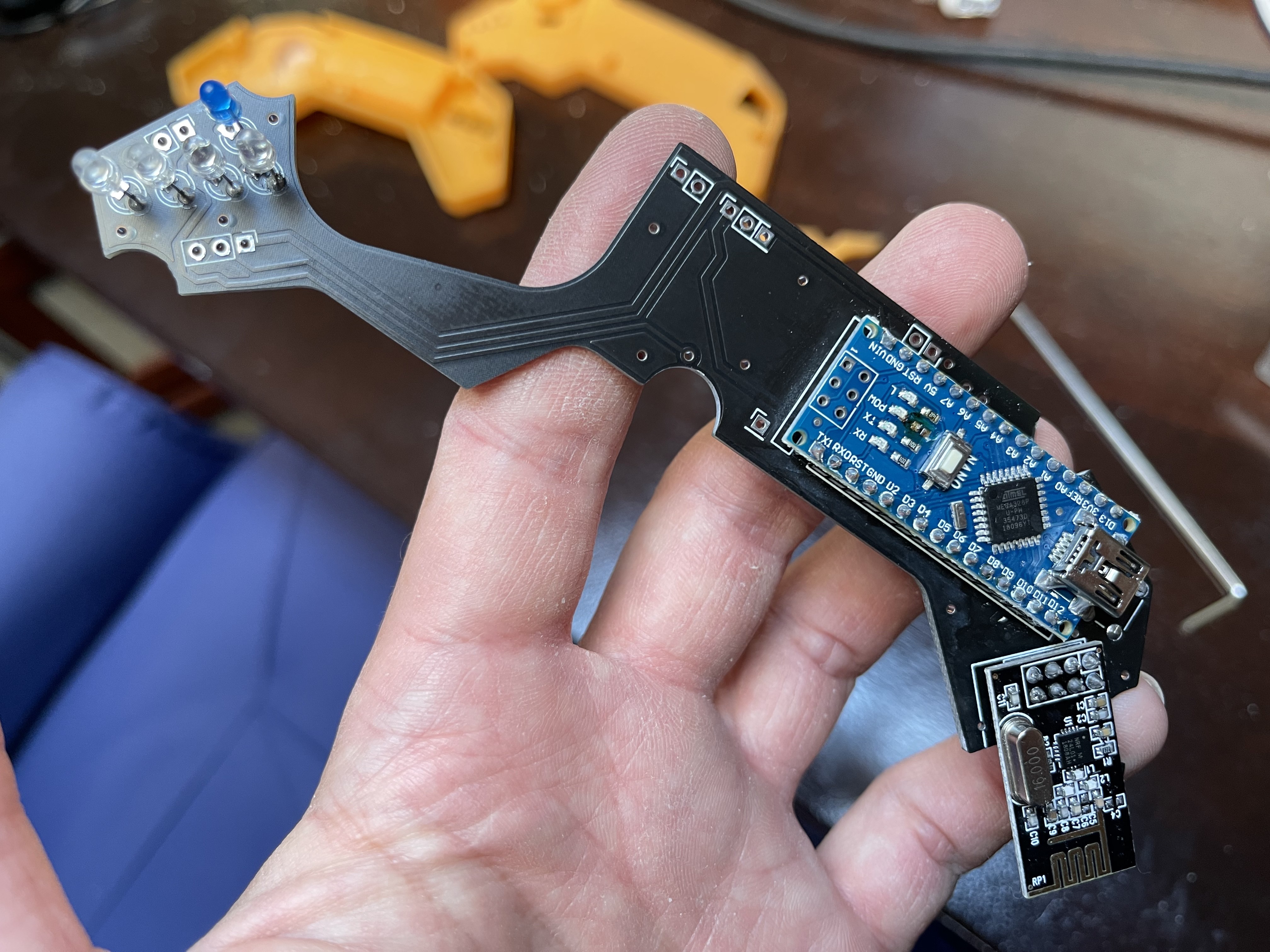
 For the throttle return assembly, I bought some springs off of Amazon. A random kit of cheap springs.
For the throttle return assembly, I bought some springs off of Amazon. A random kit of cheap springs. 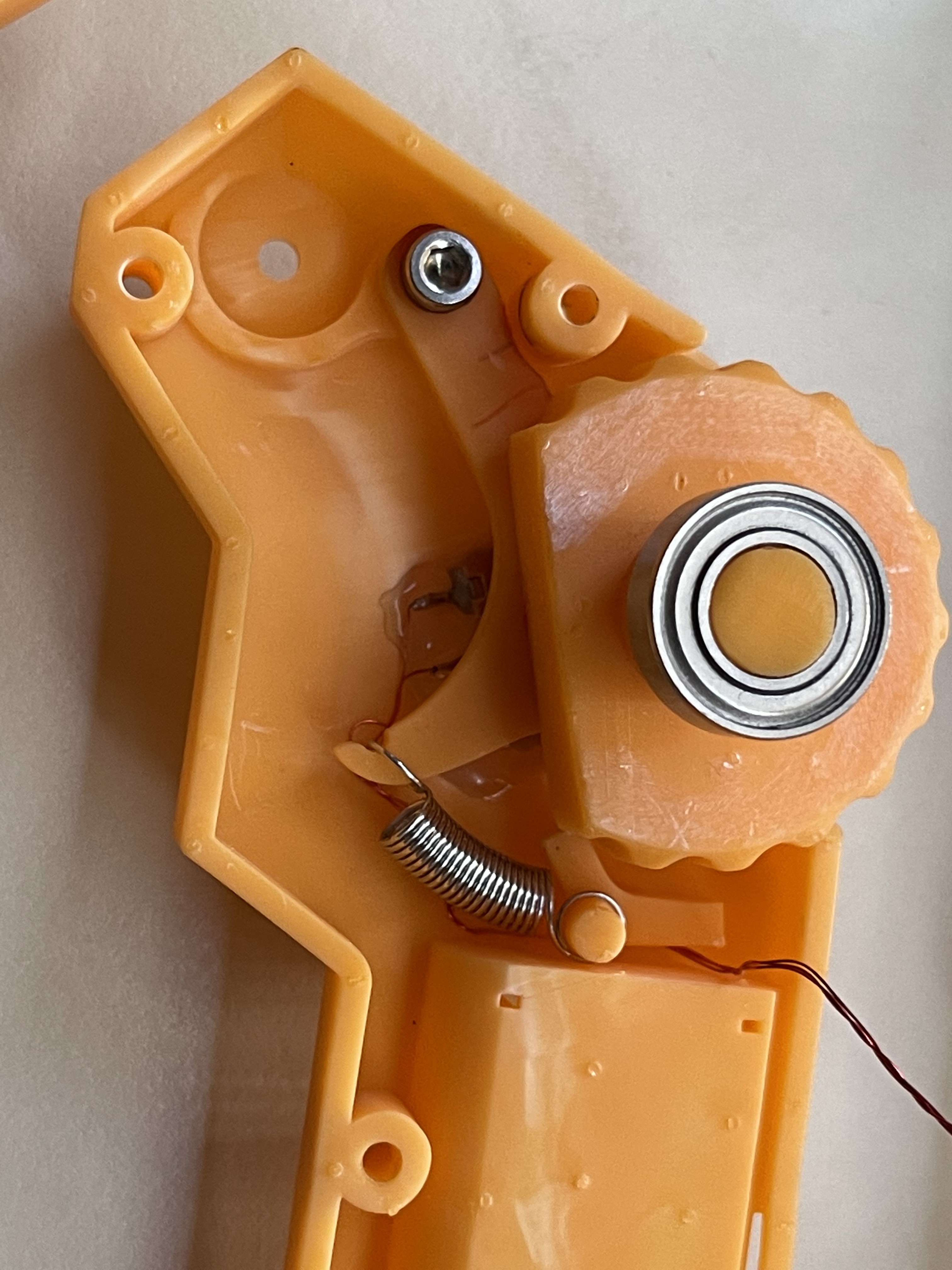
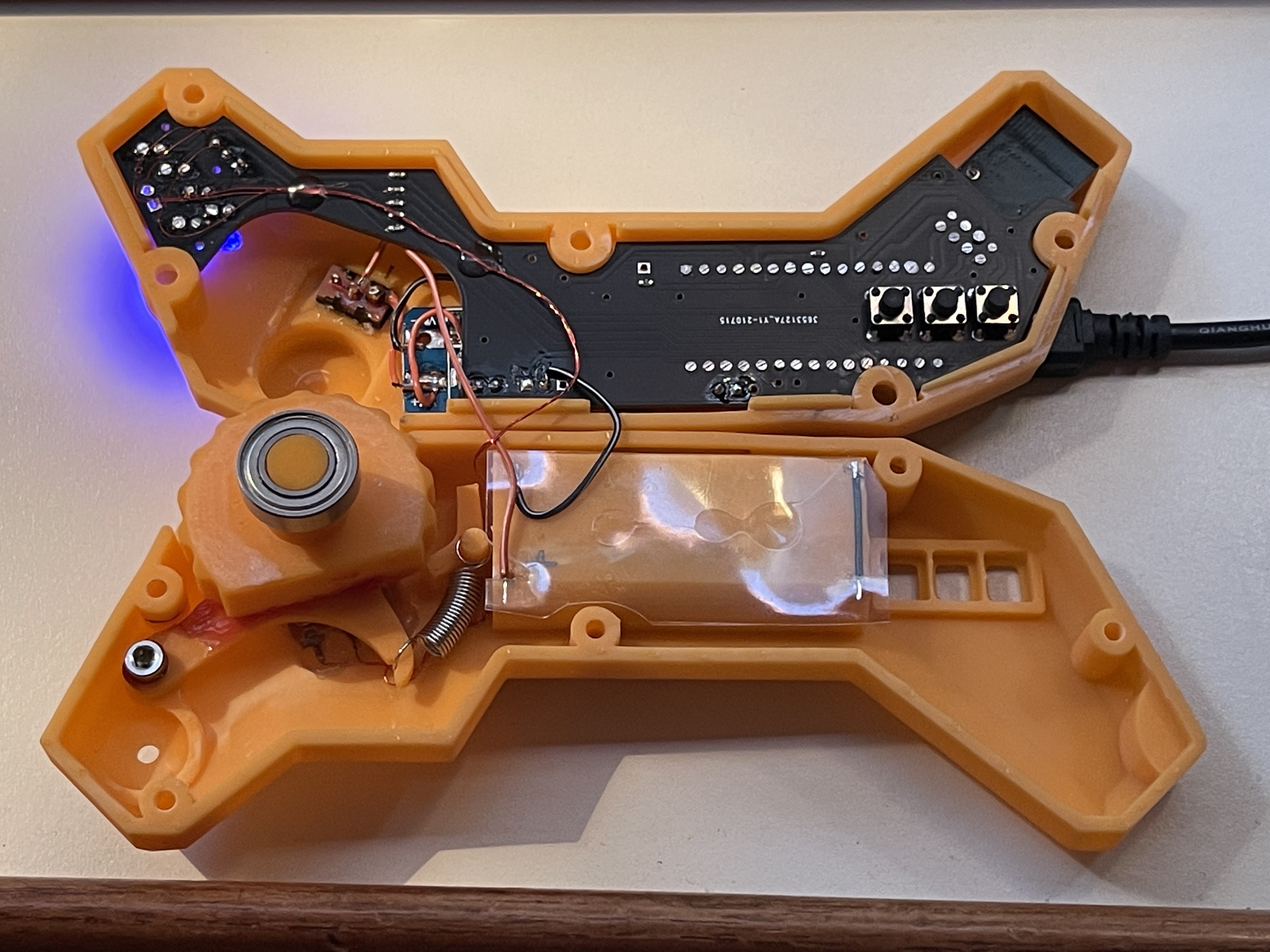






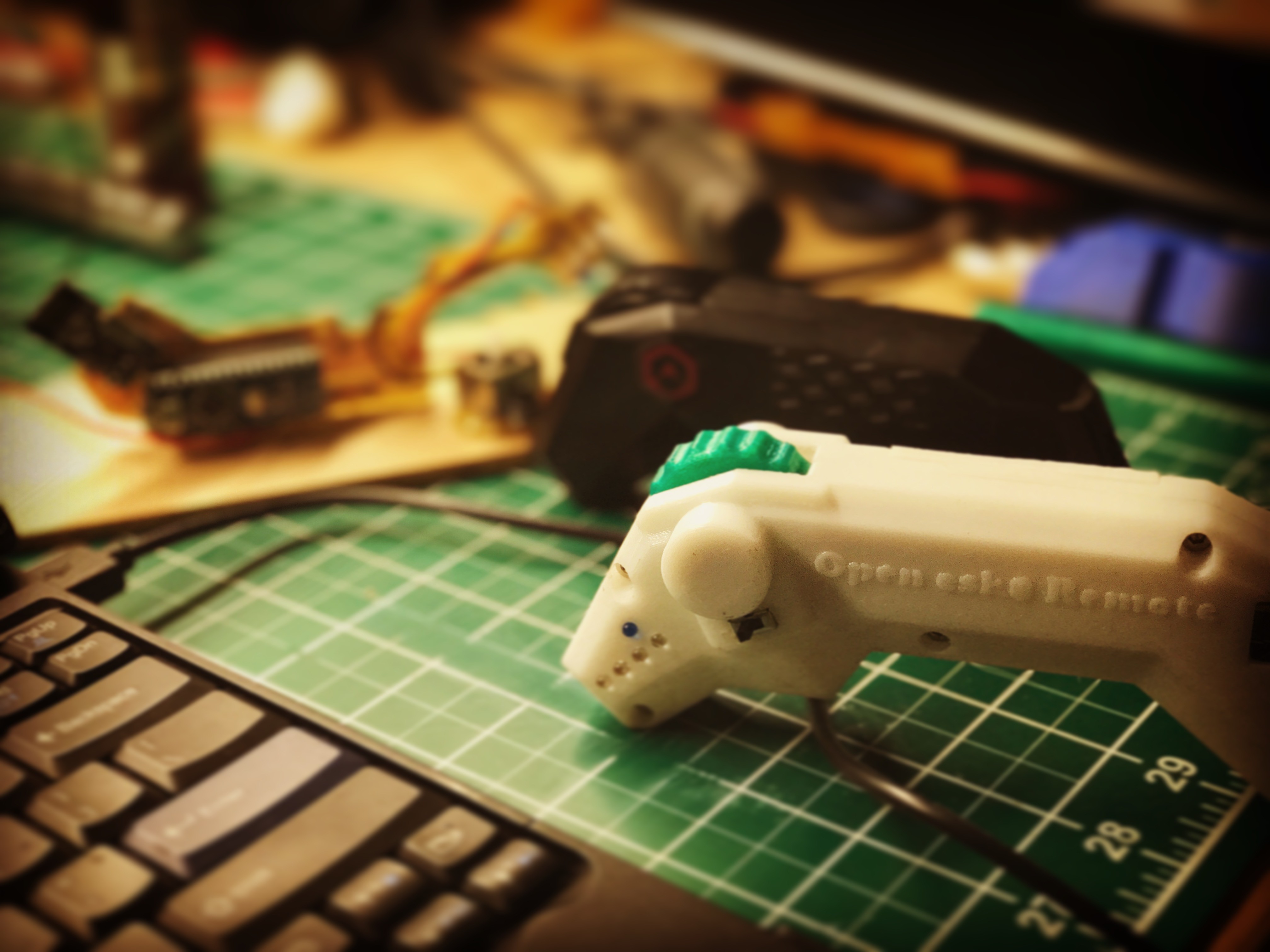
 In the end, with all the sanding and soldering, and destruction of an already glued in throttle potentiometer, it took quite an entire weekend to properly put this together. It certainly doesn't look like that in the pictures but it's the little things that take the most time. Even just getting the throttle to roll smoothly was an event....
In the end, with all the sanding and soldering, and destruction of an already glued in throttle potentiometer, it took quite an entire weekend to properly put this together. It certainly doesn't look like that in the pictures but it's the little things that take the most time. Even just getting the throttle to roll smoothly was an event....




















 The Big One
The Big One

 Alvaro Ferrán Cifuentes
Alvaro Ferrán Cifuentes
 Phil Malone
Phil Malone
without a doubt, this is the only initiative that seems acceptable to save the acton boards.Nevertheless I have several questions:
Is it possible to have some guidance on the compilation / installation / debugging part?
Is it possible to emulate your code?
The pairing phase seems a bit complicated. Is it possible to simplify it?
Also, do you see a way to recreate an app that allows to skip the pairing phase.
Thank you
Generic guidance and pairing sequence · Issue #3 · McNugget6750/Open-esk8-Remote