0%
0%
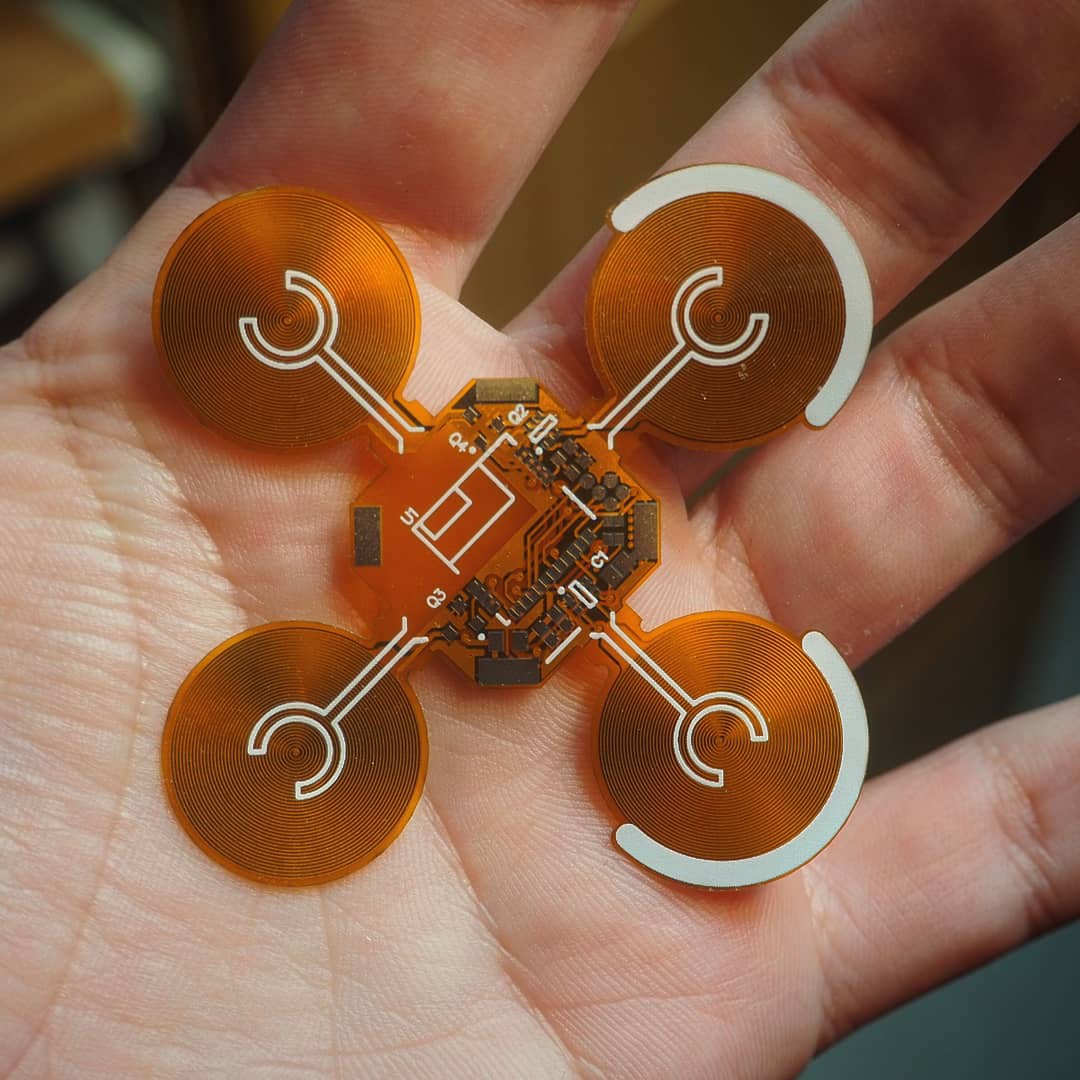
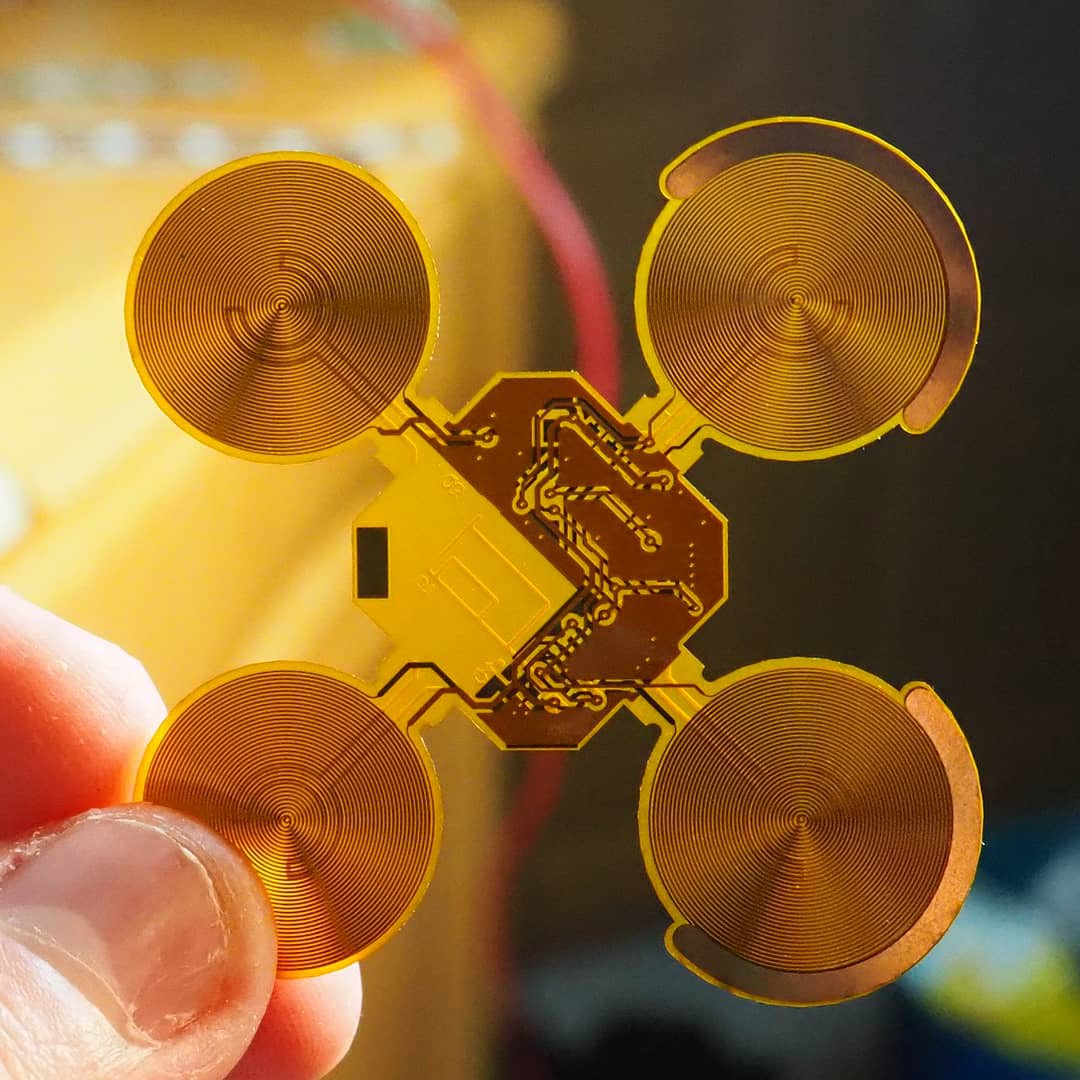
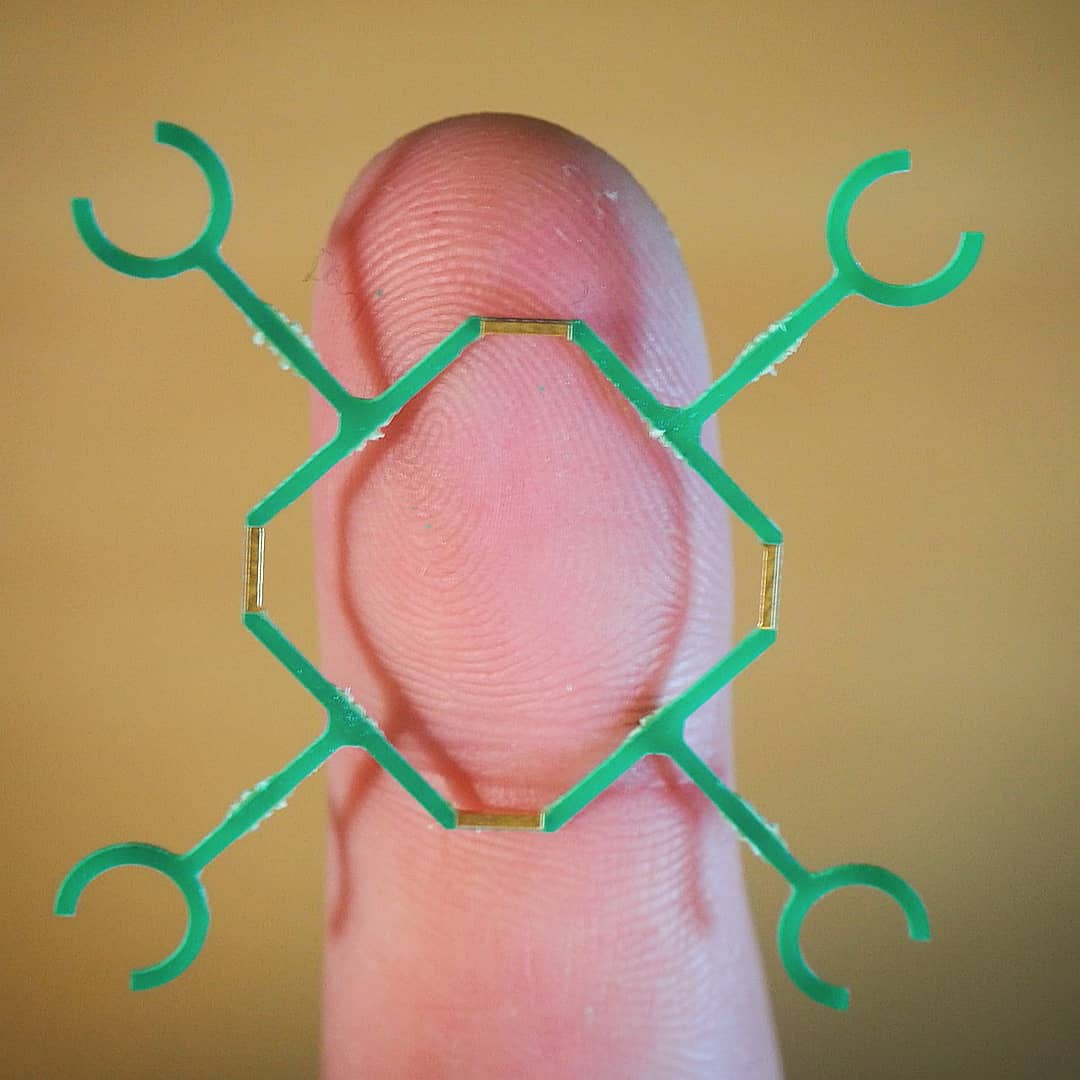
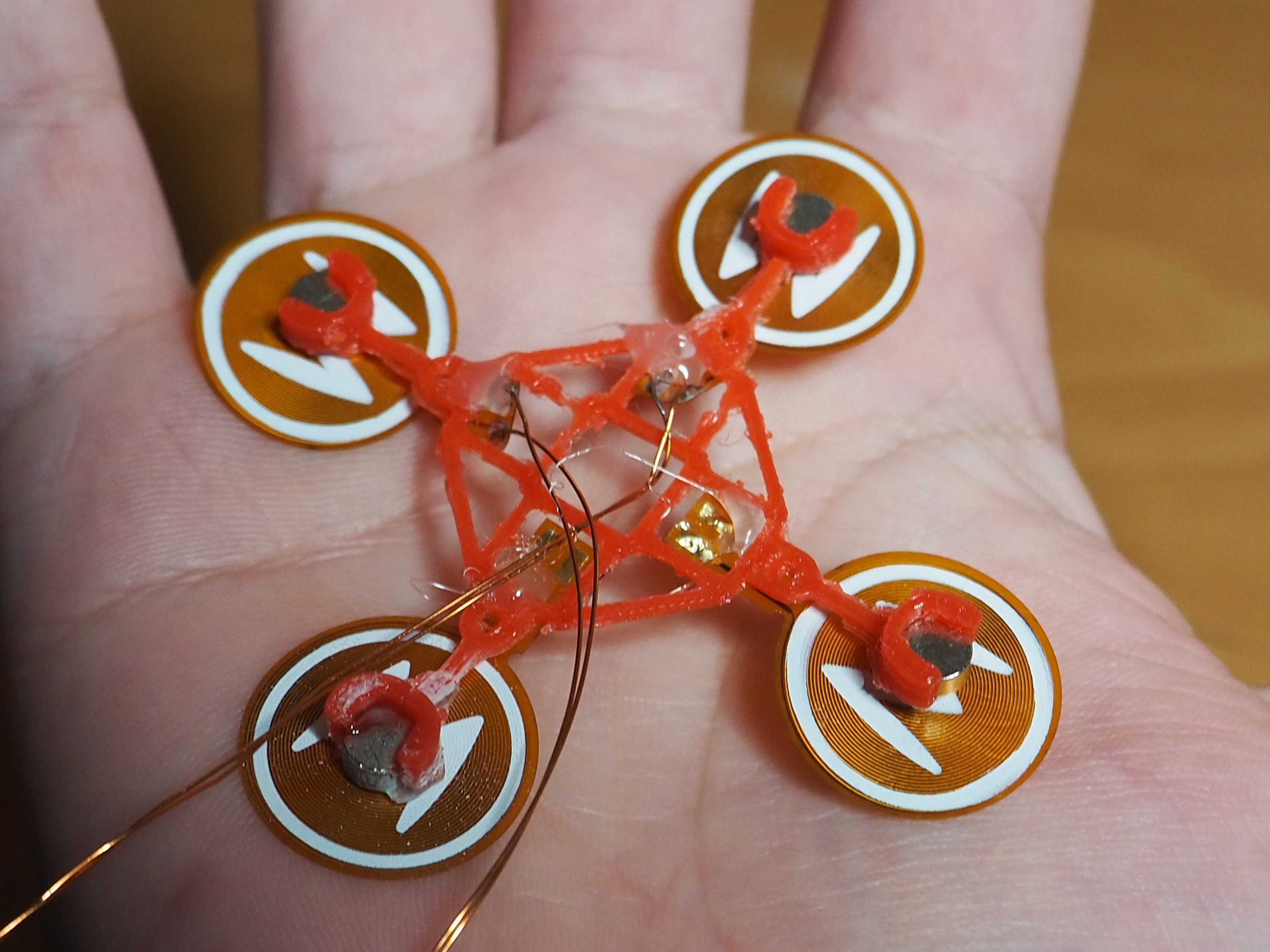
PCB Robot
A tiny robot with flexible PCB legs!
 Carl Bugeja
Carl BugejaBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests










 DIY GUY Chris
DIY GUY Chris
Your coil is inefficient because it is too spread out? You could build a two (or more) layer coil by folding the flex PCB over on to itself and gluing the layers together?