 lion mclionhead
lion mclionhead
A robotic human paw which walked on its 5 fingers. It would have no point, other than being extremely scary.
---------------------------------------------------------------------------------------------------
11/14/24
6 years later, someone actually did it. It was hard. It used a strandbeast mechanism to move 3 fingers off 1 motor. 2 servos move 2 rear fingers & 1 servo moves the wrist. It took serious skill to make the rubber enclosure. It's all manually controlled with no kinematic solver. The fingers had to be metal to get it to balance
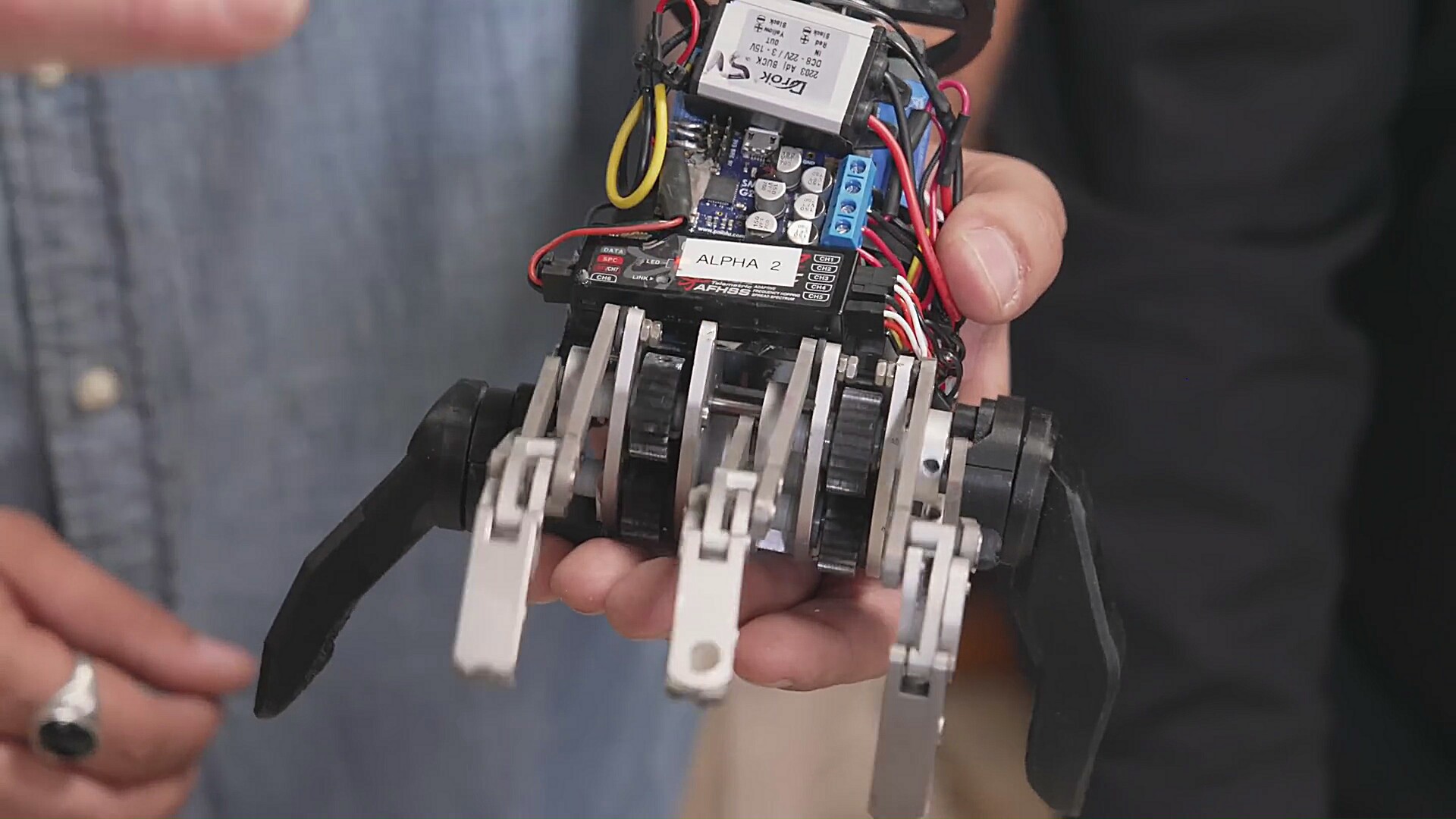

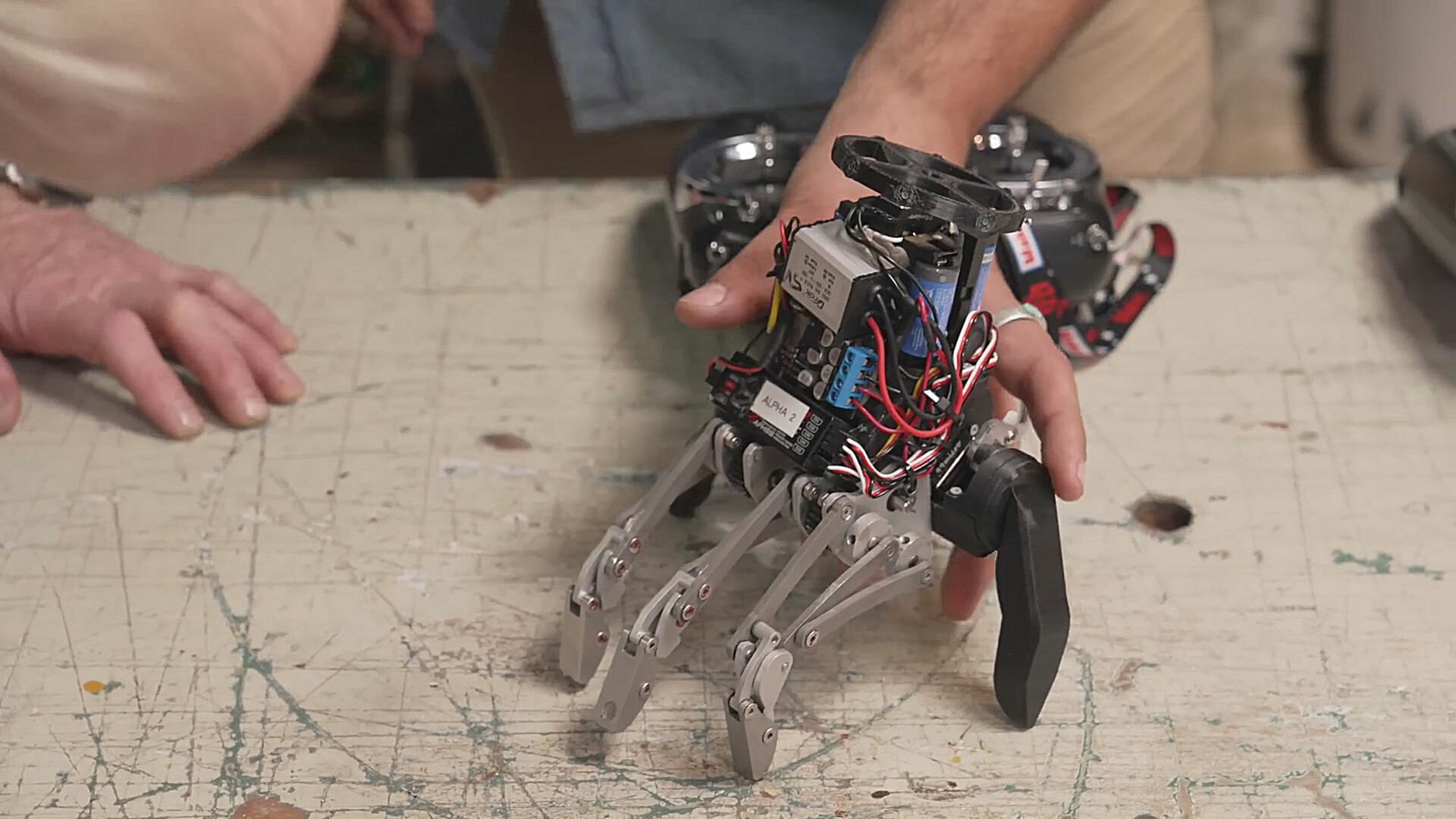
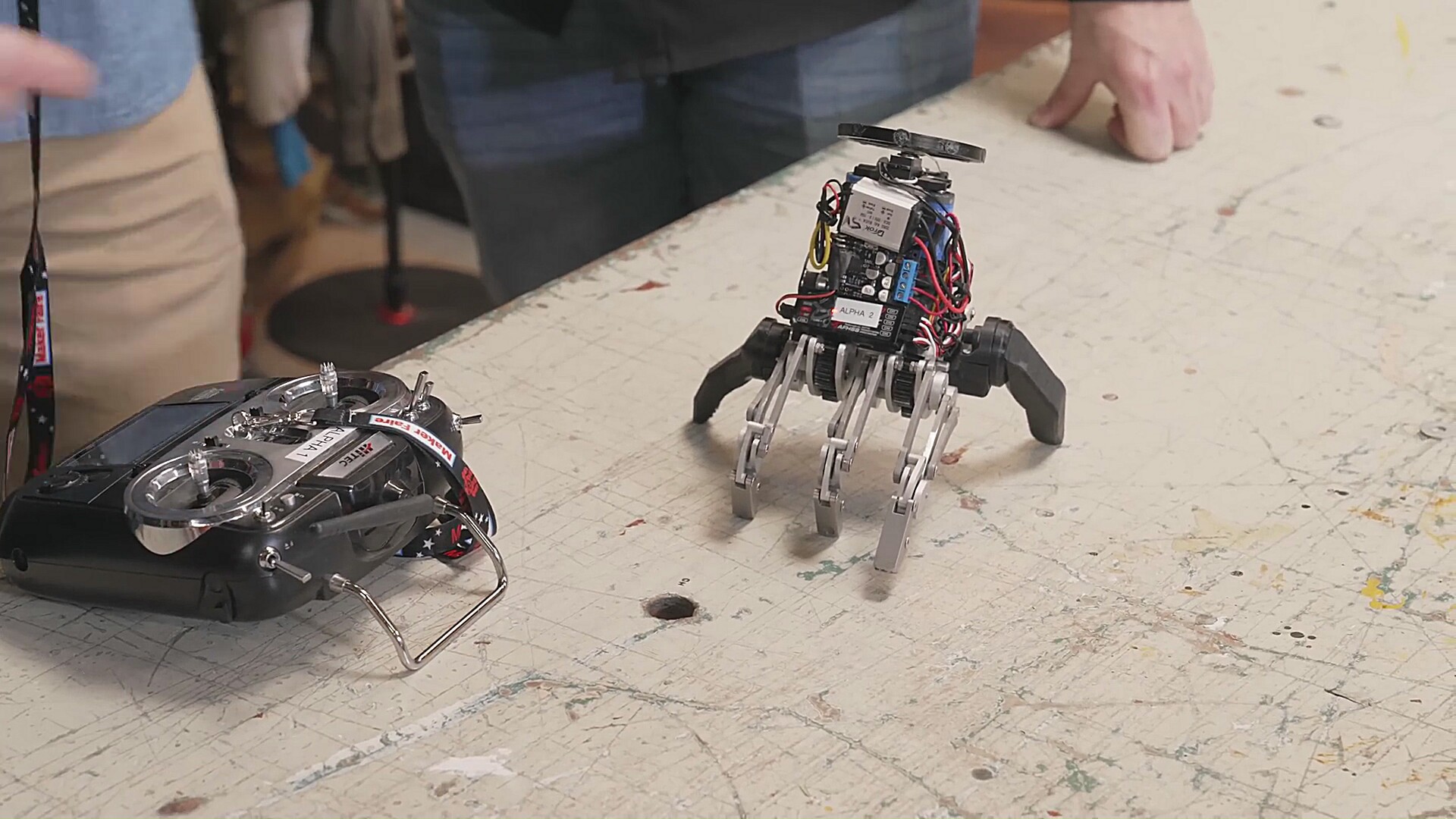
Like all movie props, it had bare minimal, straight commercial electronicals with no miniaturization, no battery charging. It somehow worked in Manhattan on 2.4Ghz. Lions tried & failed to use 100mW xbee's in the city. Maybe the frequency hopping in an ordinary hitec is good enough to overpower wifi & lions have needlessly spent an enormous amount of effort purely by missing something about 2.4Ghz.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.