-
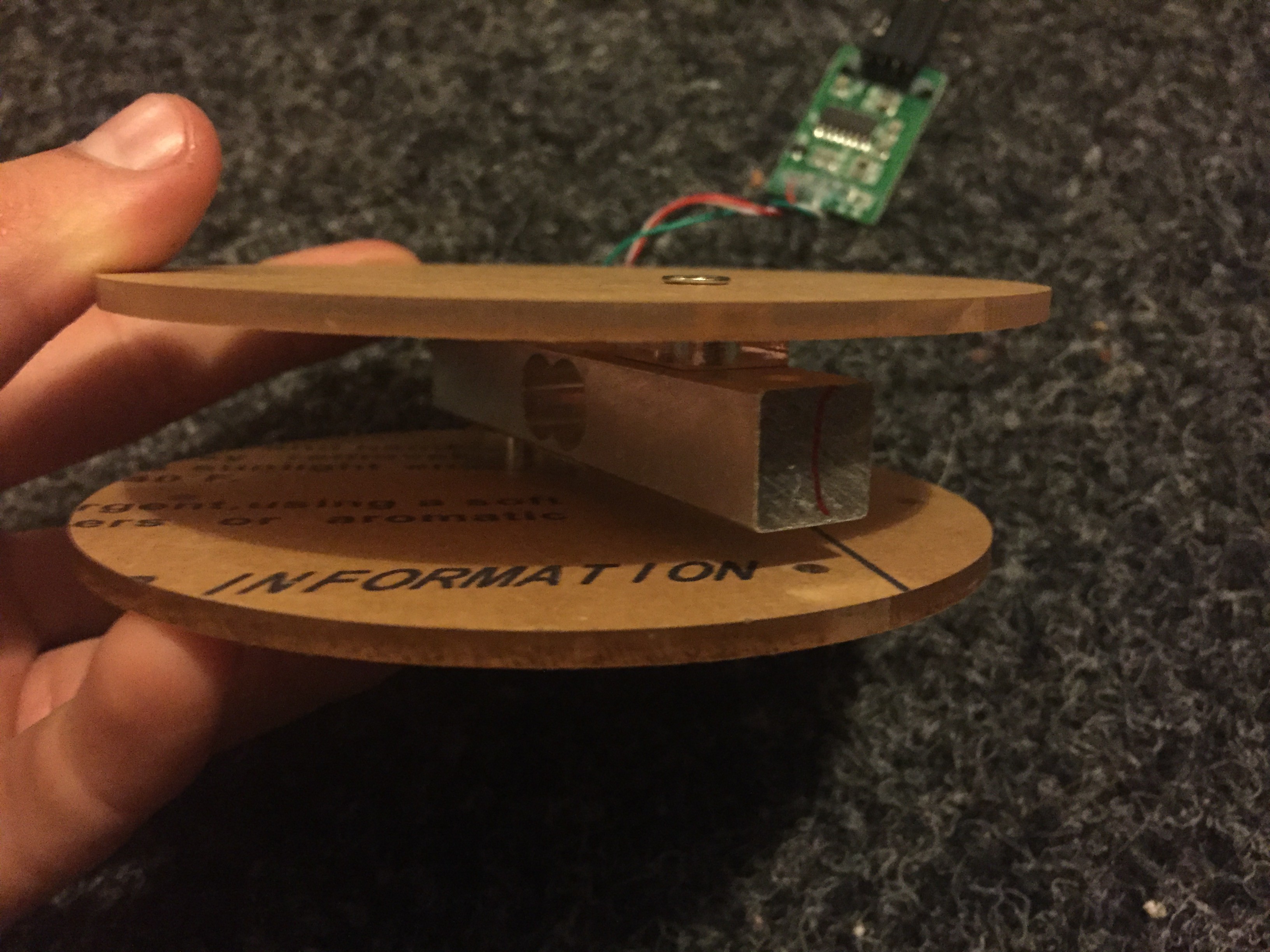
Load Cell
02/26/2019 at 19:16 • 0 commentsIn order to be able to calibrate my load cell, I needed to make a basic structure that would enable the cell to be loaded and a weight to be taken.
![]()
-
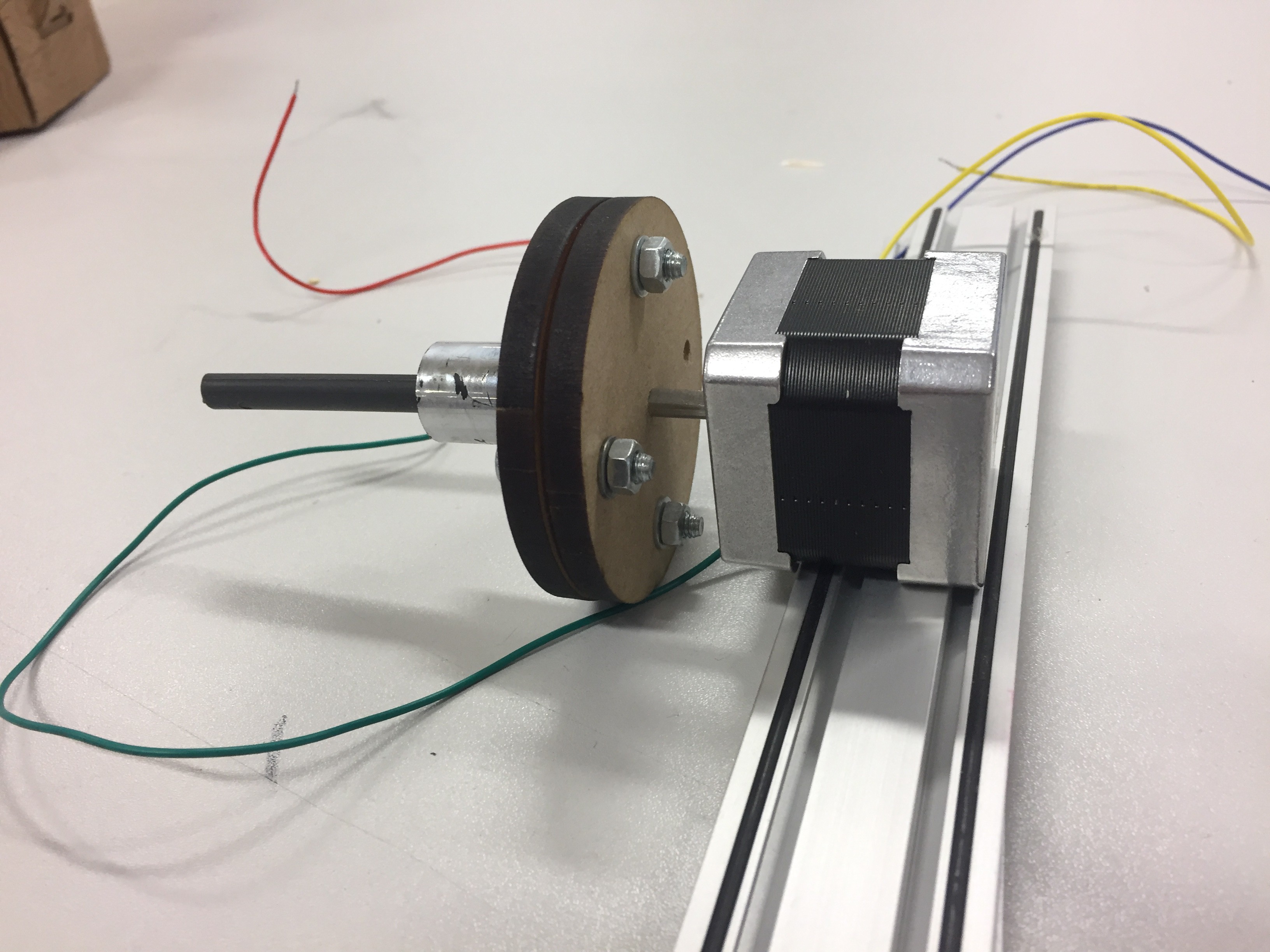
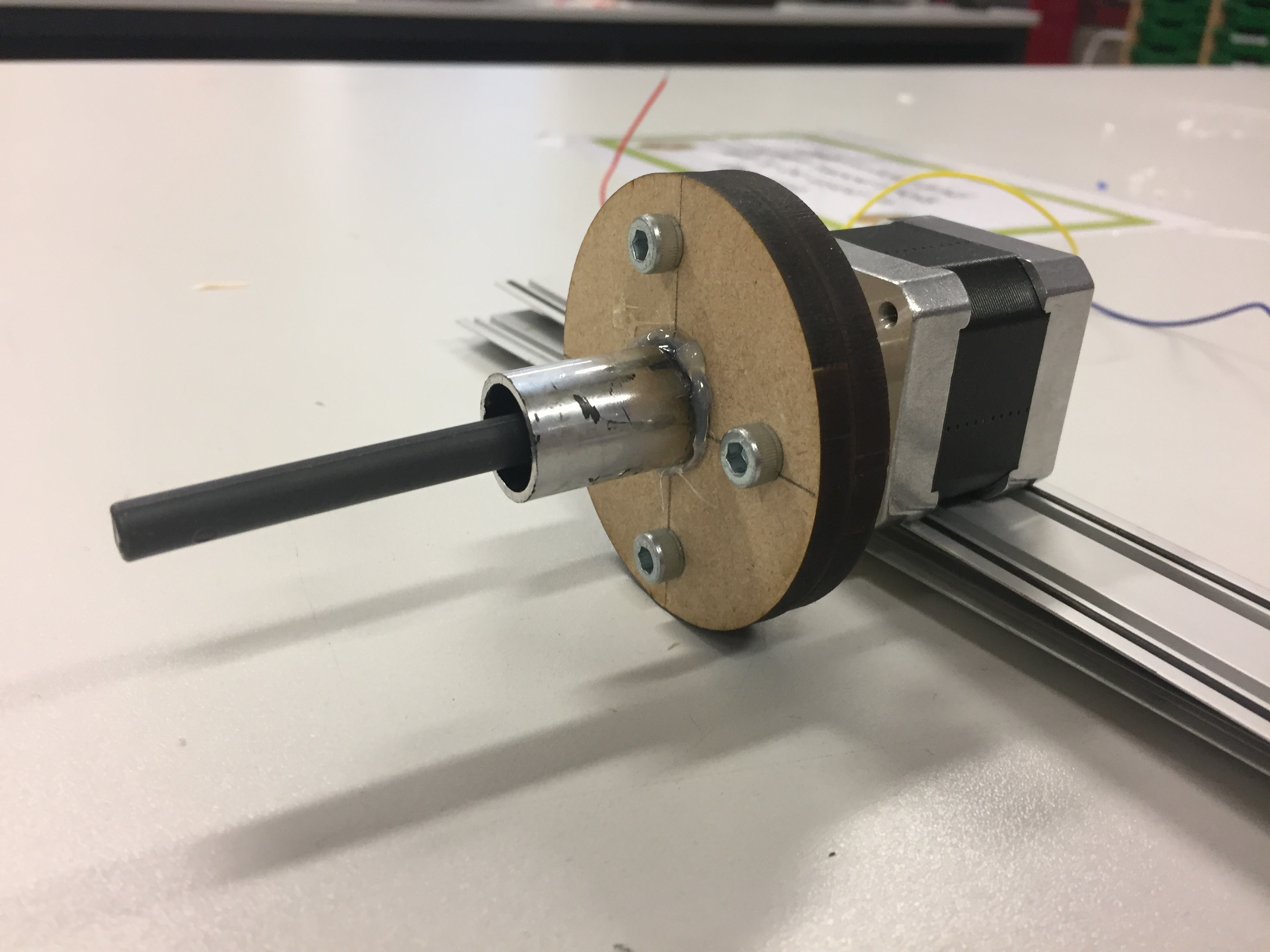
Attaching the stepper motor to the paddle
02/26/2019 at 19:08 • 0 comments![]()
![]()
![]()
So today, i spent the day attaching the stepping motor to the paddle in the cereal dispenser in the University of Sheffield’s makerspace, otherwise known as the iForge.
First, I used a laser cutter to cut two 70mm diameter circle from some scrap wood. Using a pillar drill, I drilled four 4.8mm holes into each of the circlular wood pieces. One more hole was drilled in the centre of one piece of circular wood for the stepper motor to be inserted into.
Using hot glue, I then attached the handle that I had hacksawed the day before and let it set.
The two circular pieces of wood were then bolted together back to back.
-
Where it all started...
02/25/2019 at 15:54 • 0 commentsThis is my first time using a prototyping platform and going through the creative process for a project like this one. Already it has been a massive learning curve and I've got a long way to go.
Here is a photo from my first week with the Arduino, learning how the code works, playing with some starter projects and trying to get my head around what the Arduino is capable of.
![]()
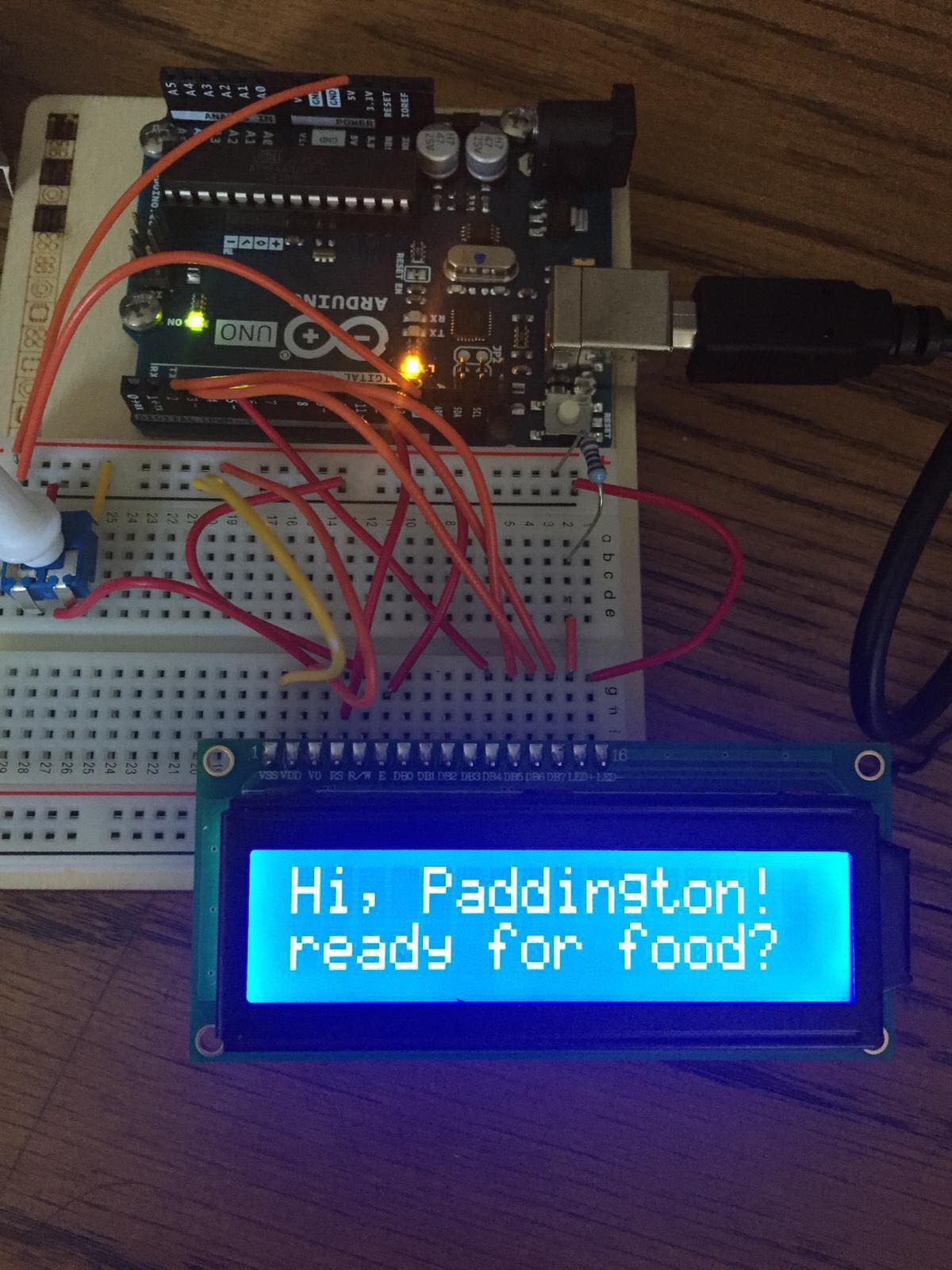
![]() So I finally got the LCD display working and coded it to say 'Hi Paddington! Ready for food?'. So for a little background if anyone was wondering who Paddington is...
So I finally got the LCD display working and coded it to say 'Hi Paddington! Ready for food?'. So for a little background if anyone was wondering who Paddington is...![]() This little guys is Paddington. He is my sister's African Pygmy Hedgehog. My project will be focused towards wild hedgehogs found in the UK but I reckon I can use the project as an excuse to visit this little guy for 'research'.
This little guys is Paddington. He is my sister's African Pygmy Hedgehog. My project will be focused towards wild hedgehogs found in the UK but I reckon I can use the project as an excuse to visit this little guy for 'research'. -
First steps in attaching the paddle to the stepping motor
02/25/2019 at 15:30 • 0 comments![]()
First step in attaching the paddle of the cereal dispenser to the stepping motor is to saw off the plastic handle in order to make the attachment easier.![]()
-
Calibrating the HX711 Load Cell
02/25/2019 at 09:47 • 0 commentsWeight Calibration
HX711 Load Cell Amplifier Interface with Arduino
In order to calibrate the load cell, I used the tutorial from:
https://circuits4you.com/2016/11/25/hx711-arduino-load-cell/
Really easy to follow, just copy and paste the code and find your calibration factor! This will be the calibration factor you will use throughout the project.
-
Back to basics
02/19/2019 at 15:44 • 0 commentsAfter some time off for exam preparation, I back to focusing on the hedgehog feeder.
This project is unfamiliar territory for me, so it takes me a while to get back into the swing of things.
Currently trying to code my project to weigh the hedgehog and if the weight falls in a specific range, this will turn the stepping motor. Sounds simple but the load cell is not 100% accurate and changes weight slightly even when a constant weight is applied, let alone when a hedgehog is shuffling about on it.
Need to do a bit more digging in similar codes...
Hedgehog Feeder
Hedgehogs in the UK are classed as an endangered species. For this reason I have chosen my final year project to be a hedgehog feeder.

 So I finally got the LCD display working and coded it to say 'Hi Paddington! Ready for food?'. So for a little background if anyone was wondering who Paddington is...
So I finally got the LCD display working and coded it to say 'Hi Paddington! Ready for food?'. So for a little background if anyone was wondering who Paddington is... This little guys is Paddington. He is my sister's African Pygmy Hedgehog. My project will be focused towards wild hedgehogs found in the UK but I reckon I can use the project as an excuse to visit this little guy for 'research'.
This little guys is Paddington. He is my sister's African Pygmy Hedgehog. My project will be focused towards wild hedgehogs found in the UK but I reckon I can use the project as an excuse to visit this little guy for 'research'.
