 RobsonCouto
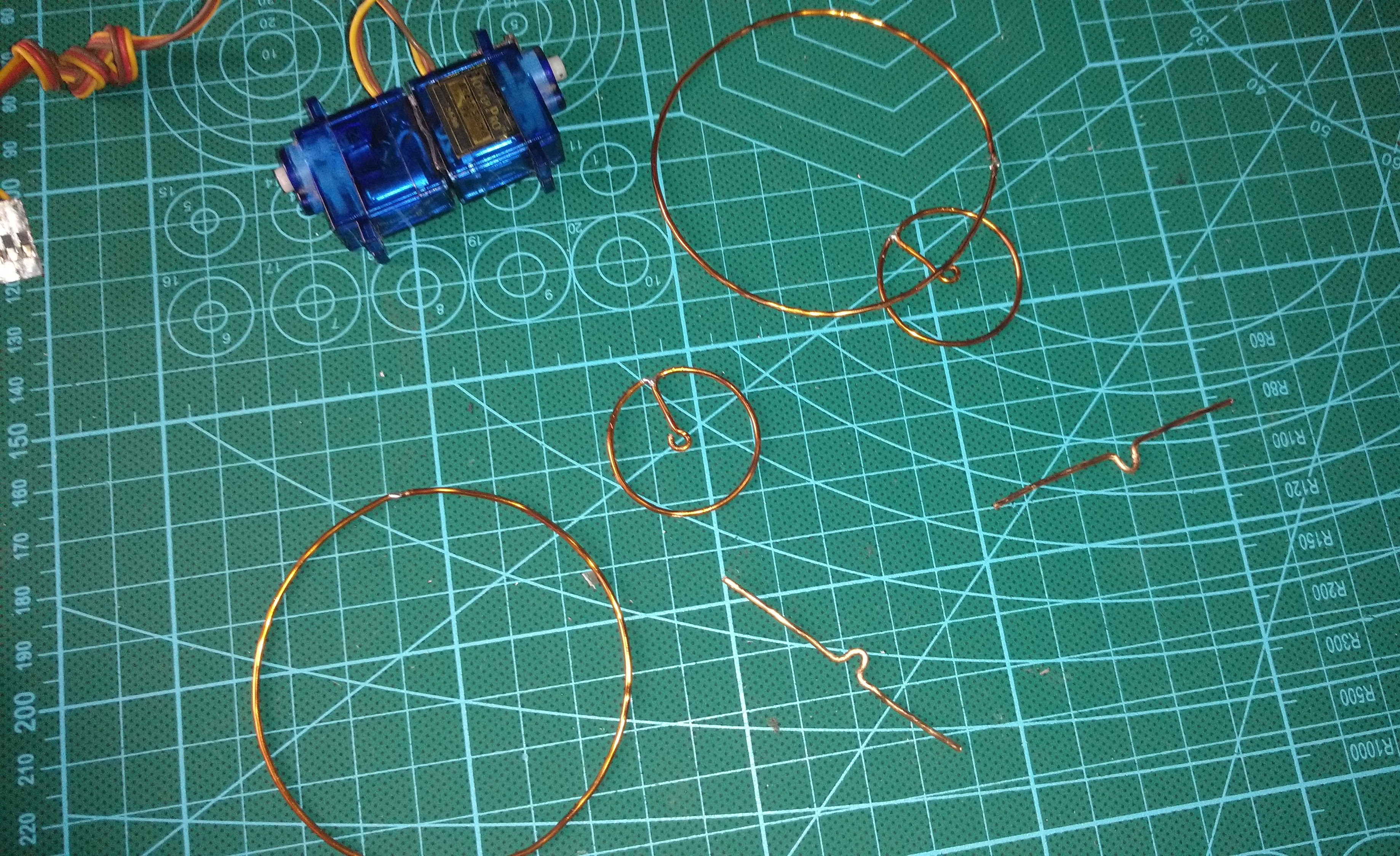
RobsonCoutoI started by gathering some pieces of wire from the junk bin and figuring out the dimensions of the robot. I could not find the wire I wanted in the local stores, so I used 16 awg wire from old inductors.
The servos were reused from another project and had already been hacked for continuous rotation long ago. I don't have pictures for that, unfortunately, but a tutorial can be found here. Heavy duty double sided tape was used to hold the servos secure back to back.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.