 Yannick (Gigawipf)
Yannick (Gigawipf)As most high end direct drive wheels use servos instead of steppers servo support is important.
The 130ST-M10010 and 130ST-M15015 are the most common servos for this application with over 20Nm of torque.
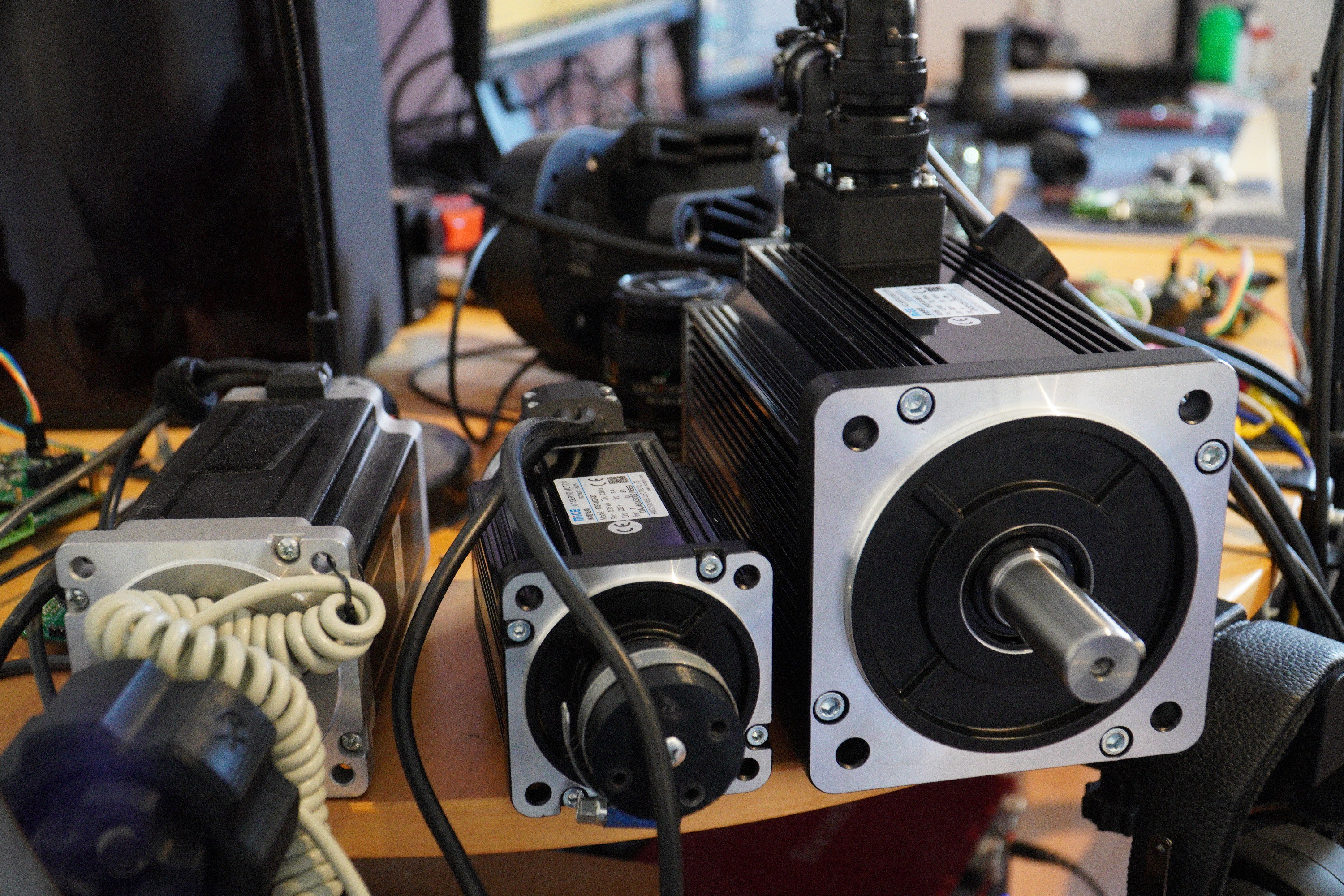
In the last weeks i was able to compare the Nema34 stepper and a Mige 80ST-M02430 and a 130ST-M15015. Two very different servos.
The 80ST is with under 5Nm a bit weak but has very low resistance and good reaction speed while the 130ST has dangerous amounts of torque and a bit more mass and resistance.
For a wheel the 130ST is probably the best option here.
The next TMC motor driver will also have the new chip with a few fixes, an onboard step down for better reliability and will probably keep the external braking resistor as the large servo does generate quite a lot of voltage when being turned manually.
Update summary from the last video:
Reasonable motors are for example:
3 Phase servos:
130ST-M15015
130ST-M10010
80ST-M04025
80ST-M02430
Nema34 Steppers with Encoder:
34HE59-6004D-E1000
34HS59-5004D +Encoder (E6B2CWZ6C or AMT132)

Those are all usable motors :)
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.