The idea is to build a number of small (palm sized), simple (using the BEAM 'less is more' philosophy), and relatively inexpensive ($50 is the target) robots, and give them the basic abilities to communicate with each other and adapt to their environment. The idea is to see what kind of complex social behavior we can coax out of a multiple of relatively simple machines, and hopefully be surprised by something we didn't explicitly program them to do.
The 'bots are eventually going to be solar powered. They will sit collecting energy until they have enough to run through a movement or communications cycle. When they decide to move (the target is to have them move for 15-20 seconds every 15-20 minutes) they will wander randomly for the first half the cycle to ensure that they spread and explore. During the second half, they will realize that they're 'hungry' and will use light detection to head for the brightest area they can see, bettering their chances of recharging quickly.
A few of the settings (ones for, say, motor speed or level of contrast it looks for when seeking light) will be left for them to decide for themselves. When they sit out a cycle and go into a communications phase, they'll use small radio transmitters to broadcast their efficiency level, and what their settings currently are. All the other 'bots in the immediate area will compare their own efficiency to the one broadcast, and nudge their own settings closer to the broadcasting 'bot's, or ignore them if they're doing better. Eventually, this yes/no better/worse behavior should help each other find the best settings for whatever environment that they're placed in.
To ensure that the 'bots go through the full range of their settings, random mutations will be introduced into their settings. Mutations that prove beneficial will spread through the swarm. The ones that don't will disappear within a few hours or days depending on how often they interact with their hivemates. This presented us with the first behavioral question we ran into before we'd even begun: Can the 'bots even exist individually? We didn't explicitly set out to design this behavioral aspect in, but a single 'bot might not be able to. It will still generate random mutations in it's code, but without at least one companion to compare it's efficiency with, it might get itself so far out of whack that the amount of power from sunlight it gathers during the day won't be sufficient for it to survive the night.
As for how the rest of the 'bots will spend the night, some members of the swarm may find themselves in a slightly better position than the rest. It may find it's way to a light that's been left on, or a bright spot beneath a window from a streetlight outside. If it manages to find one of these 'it's better than nothing' sources, it will remain in place and turn it's IR LED fully 'on'. This acts as a beacon for the rest of the members, who use the exact same light seeking script that they use to find sunlight during the day, except the brightest light it sees and steers towards is it's hivemate, and not the sun.
Once we get the 'bots built and programmed, we will wait and see how they act. Will they run about randomly during the day, or will they migrate from one side of the room to another following the sun's arc? Will they tend to roam alone, or will they travel in a pack? What happens when they reach a homeostasis with the environment we put them in? Will 'bots who have the same settings act exactly alike, or will individual traits arise? Will 'bots that live upstairs in the electronics area settle on the same settings as 'bots that live in the workshop, that gets no natural light at all? What happens if we introduce code that causes not just mutations in their settings, but also the code that they use to communicate with each other? We might wind up with two seperate subspecies that can't even communicate with each other. What happens if you mix them? Will one act as an invasive species, changing...
Read more »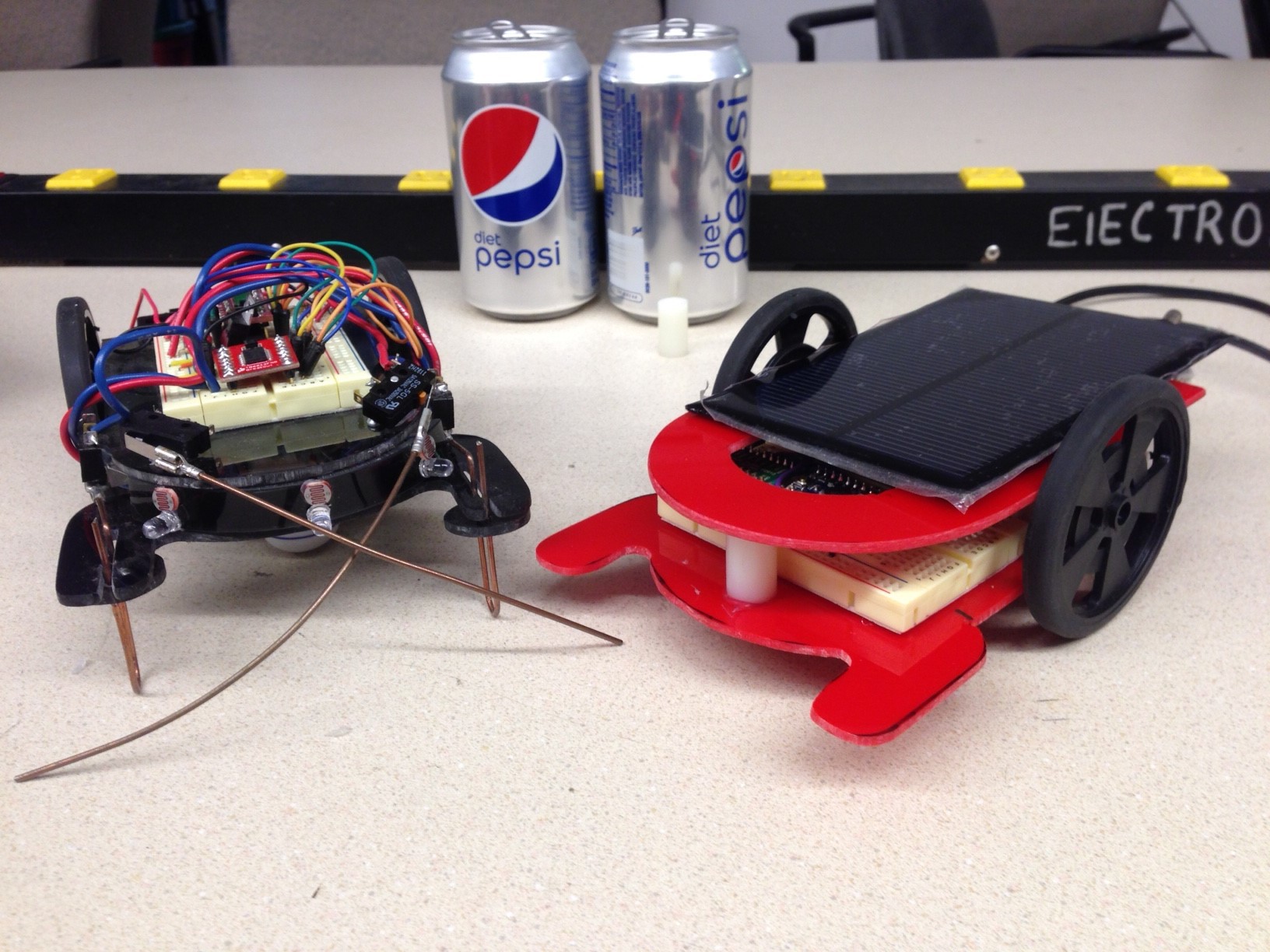
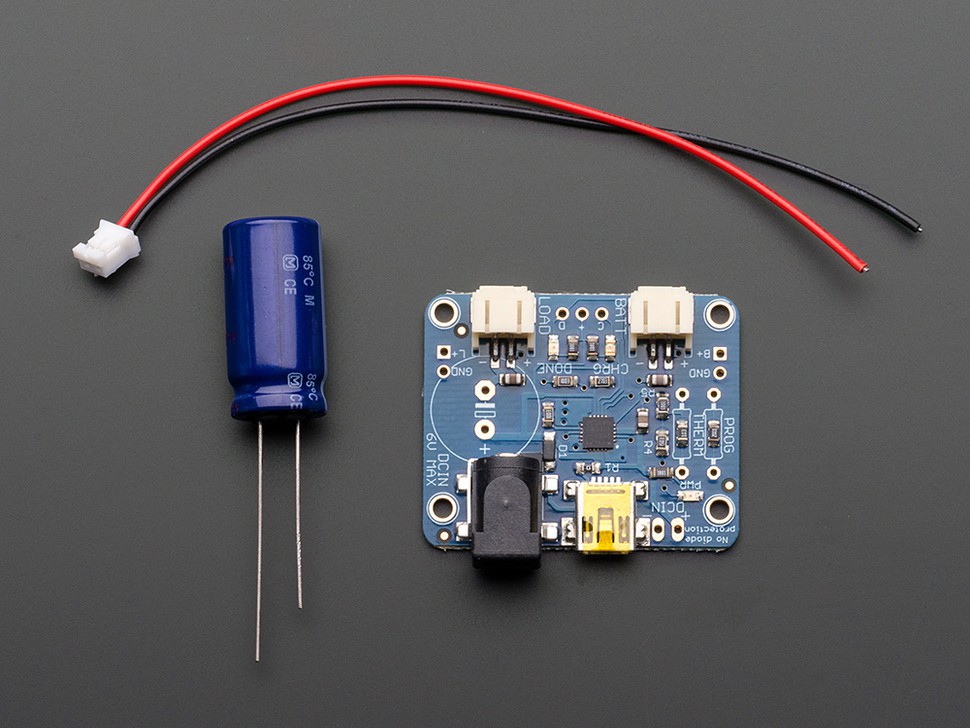 Well, the battery charging boards have arrived. As much as we hate to admit it, this might have been the way to go from the very beginning. The new boards have more than a few advantages. They are specifically designed to charge Li-Ion batteries from solar cells, and it adds the capability of charging the 'bots via USB. As an added benefit, it also allows you to patch into the status LEDs (ready, charging, low) and use them as digital inputs to the Arduino. In short, we can let the charging board monitor the battery voltage without having to write a separate voltage monitoring script for the Arduino. Any chance we can get away with writing less code to debug, the better.
Well, the battery charging boards have arrived. As much as we hate to admit it, this might have been the way to go from the very beginning. The new boards have more than a few advantages. They are specifically designed to charge Li-Ion batteries from solar cells, and it adds the capability of charging the 'bots via USB. As an added benefit, it also allows you to patch into the status LEDs (ready, charging, low) and use them as digital inputs to the Arduino. In short, we can let the charging board monitor the battery voltage without having to write a separate voltage monitoring script for the Arduino. Any chance we can get away with writing less code to debug, the better.


 Mister Malware
Mister Malware

 Rudolph
Rudolph
 Chris Low
Chris Low