We've been putting Frankie and Johnny through their paces, and a disturbing trend developed. It seemed both of our prototype 'bots forgot the 'How Not to Fall Off a Table' lessons. They still ran fine on the floor, but they started to ignore edges with a disturbing and ever increasing frequency. They also became somewhat erratic again, but it didn't seem like the previous issues we had. A close machanical exam of the 'bots showed us what was wrong...
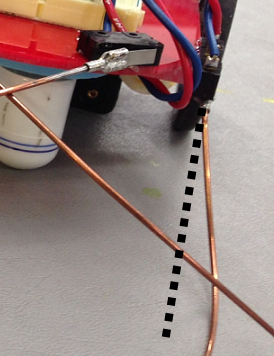
We designed the Emergence robots along the 'simple is better' philosophy of BEAM style robots. We decided that simple microswitches with feelers would suffice for obstacle avoidance, with the added benefit of switches being much cheaper than IR or ultrasonic options. As it turns out, the switches are very reliable for what they're designed for (they're rated for a lifetime of over 100K clicks). However, as edge sensors they were put to a good deal of lateral stress, which they weren't designed to do. While turning right or left, even the fairly weak resistance of tables and wooden floors caused the metal tabs the feelers were attached to bend slightly. A tendency to jam them forklift-like under boxes and other obstacles made matters worse. You can see from the picture in the previous post that it was already starting to get off kilter the first night. Eventually, the tab would bend to the point that it didn't make contact (and dive off the edge) or not reset, so the 'bots always thought there was an edge (explaining the constant attempts to back up or turn). This was extremely frustrating. IR rangefinders cost about 6 times as much as the switches, and ultrasonic options were about 15 times as much. A few extra dollars is no big thing if you're building one robot, but for 15-20 robots? This would have completely blown our budget. IR reflectance sensors were in the same price range as the switches, but we rejected that option in the design phase due to them overreacting to dull or dark spots on the floor instead of actual obstacles.
But, we may have found a way to get back on track. We found some IR proximity detectors that might work. They're like the IR rangefinders that some robots use, except a little dumber. They can't give you an exact distance, but they can tell you if there's an object 2-10cm from it. This should work for our purposes. At $6 each they're obviously more expensive, but not prohibitively so. Also, preliminary investigations have shown we might be able to shave a few bucks off the money allotted to the solar cells and auxillary battery. We haven't broken the bank yet, but it's starting to get tight...
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.