 Nicolas Guilbert
Nicolas GuilbertOur old way of assembling the robots was based on pin connectors, inspired by the Lego Technic Pin (part. no. 3673).
 However, when these are printed in PLA as we do, the strength, precision and elasticity are far from those of the injection-molded versions of Lego. It sort of works, but the pins are too difficult for the kids to insert into the holes of the plates on their own and break after a while. Good enough to get started, but not a feasible way forward to our ultimate goal of building robots that can build robots.
However, when these are printed in PLA as we do, the strength, precision and elasticity are far from those of the injection-molded versions of Lego. It sort of works, but the pins are too difficult for the kids to insert into the holes of the plates on their own and break after a while. Good enough to get started, but not a feasible way forward to our ultimate goal of building robots that can build robots.For quite a while we thought of a better way to assemble the Dark Side Rovers. We considered that robots are good at rotational movements, since they are generally based on motors and gears. They are also good at executing multiple tasks at exactly the same time...
And there came the idea of UnisynX and the Twisterbolts!
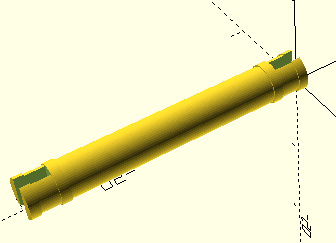
The Twisterbolts are plain old bolts, except that they are left-hand threaded at one end and right-hand threaded at the other. UnisynX is a construction that is being held together by the bolts.

The key concept is that none of the bolts can be rotated on their own, all of them have to be rotated at once. The more bolts you have, the less likely each bolt is to "random walk" away from its intended state and the likelihood off-hand would seem to be dropping exponentially as the number of bolts used in the construction increases.
In our 3D-printed test constructions, there is enough slack for the twisterbolts to be rotated by hand, a few degrees at the time, one after the other in a round-robin fashion. For metallic high-precision versions, that wouldn't be feasible and would require either electronically synchronized power screwdrivers or a planet gear as shown below:
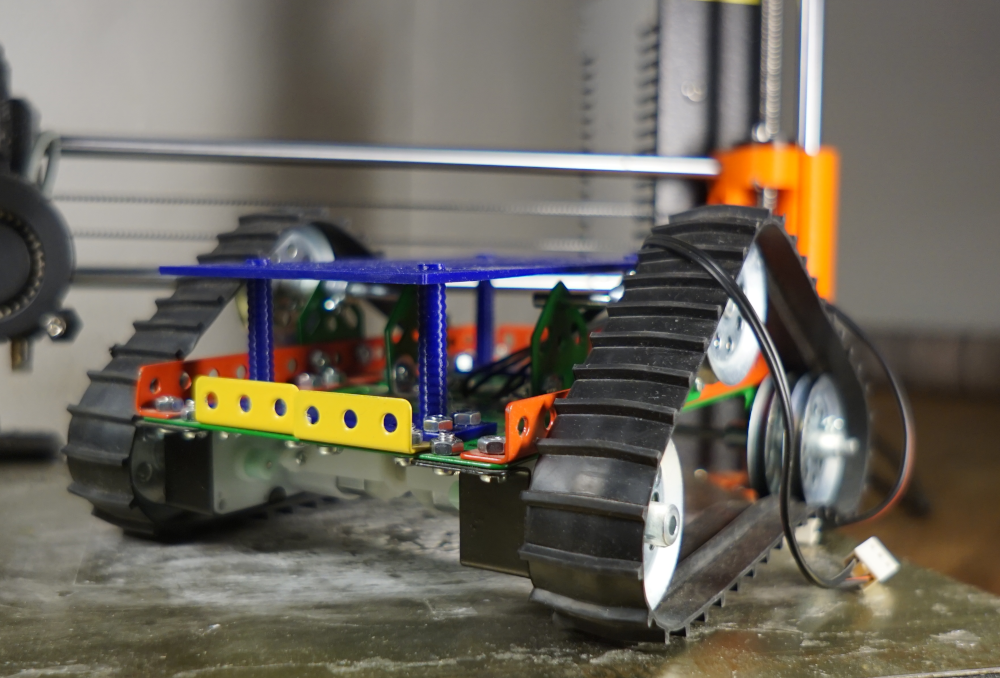
The rovers now start looking like this:
 The invention is in the public domain and is completely free for use.
The invention is in the public domain and is completely free for use.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.