 Alex Ryker
Alex RykerTreads were chosen as the drivetrain for the prototype due to their ability to
traverse difficult terrain. With proper treads and sufficient drivetrain power,
a robot could theoretically climb up and down mounds of rubble, bridge small
gaps, etc. without losing its balance. Treads also eliminate risk of punctured
tires or broken wheels.
The "scoop" mechanism will be designed to allow an injured human to crawl in,
allowing the robot to carry them away from the disaster site. It will feature
interior padding, along with a closable and lockable cover to shield the
human occupant from further danger. It will also be outfitted with interior
lighting, as well as an audio connection to the robot's operator.
The arm mechanism will be designed for vertical movement to allow the
operator to grasp debris, then turn the robot to discard it. A modular
gripper will be attached to the end of the arm via a standardized mechanical
and electrical system, allowing different grippers to be attached to deal
with different kinds of debris (e.g. vice grip, claw, electromagnet, etc.).
The prototype will have a vice-grip style gripper.
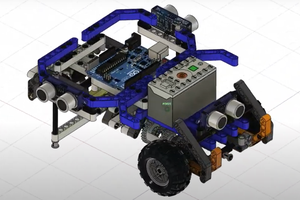
The 360-degree sensor package will contain a camera, microphone, and speaker
system. It will be mounted on top of the robot and be used by the operator
to receive audio and visual data from the robot. The speaker system will
allow the operator to communicate with anyone in the vicinity of the robot.
If necessary, other sensors will be added at a later date.
The applications of this design are varied. The drivetrain and gripper will
both be designed to be modular. This way, if treads or a vice grip are
deemed inappropriate for any given situation, they can be swapped out for
alternative mechanisms that are better suited to the task at hand. The
primary market for this product would be military and government
organizations such as police and fire departments. If this were to go to
market, a website would be set up that would allow prospective buyers to
choose the specific mechanisms that they believe would work best for their
specific situations. A service could also be offered to work with
interested parties to design new add-ons/modules for them if the available
options do not meet their needs.
Some possible use cases for this robot include:
- Disaster relief in urban areas in the aftermath of natural disasters (flood, earthquake, etc.).
- Search and rescue of both civilian and military personnel in a combat area (urban or otherwise).
- Emergency protection in a non-disaster environment--for example, units could be placed in urban areas, and someone who feels threatened could climb in the "scoop" and be automatically conveyed to the nearest police station.
- Search and rescue in wilderness areas, using a combination of teleoperated mode and autonomous searching mode.

 Ted Huntington
Ted Huntington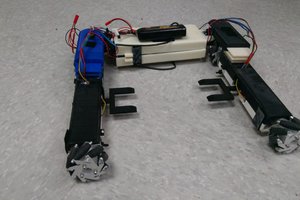
 evive toolkit
evive toolkit