 Nick Thatcher
Nick ThatcherThe original idea for an omnidirectional bike was planted a number of years ago in a late night conversation with my brother, I had just started dabbling with self balancing devices & my brother was eager to contribute.
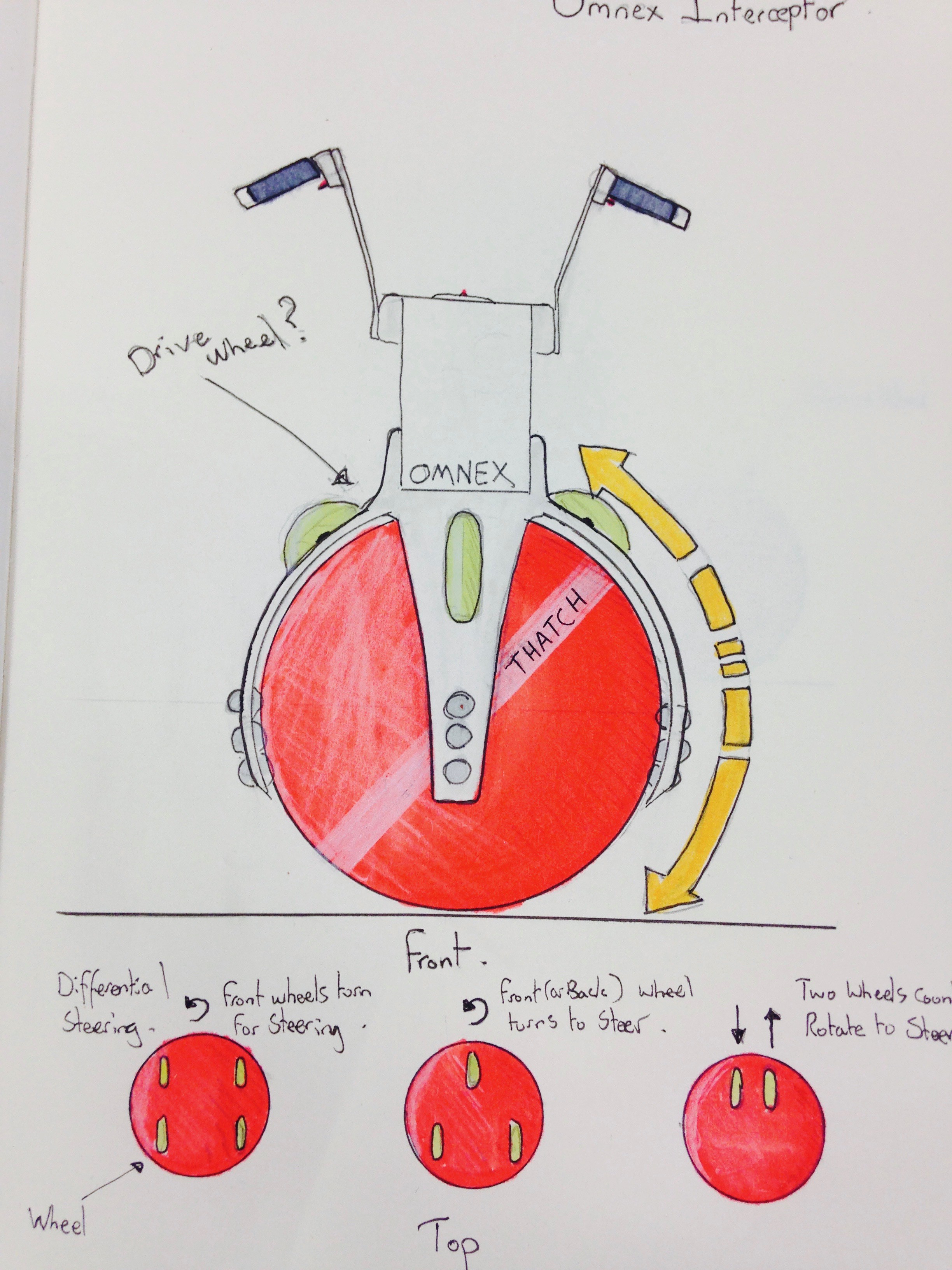
At the time the idea of making a bike that balanced on a ball seemed a bit to much of a challenge, for starters where would I find such a large ball?
In the habit of keeping a sketchbook for our weird ideas (squirty cake anybody?) I did a couple of quick sketches.
BTW - Still haven't found a way to make squirty cake, any ideas?
Skipping ahead a few years and with a good number of crazy contraptions under my belt I finally decided to go to university. (I was 25 at this point, my school grades hadn't been that great and I didn't think I would ever go, ultimately it was a self balancing unicycle that helped me get in).
At uni the projects in the first two years were set, however in the third year you get to choose your own projects, I instantly knew what I was going to work on.

As mentioned in the project introduction I have been slowly chipping away at this project for a while now, the initial design work for the bike plus a whole load of research was done by myself during the degree, since graduating I have been attempting to pull it further into reality.
As it stands I have almost completed a hardware prototype, the intention is to use this as a development platform for the electronics & software, then use everything we learn to come up with an improved design. (Already have a few things on the list)

In the next couple of project logs I will go over the design/prototyping work that led me to this stage and explain how I made the prototype.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.