 Nguyễn Phương Duy
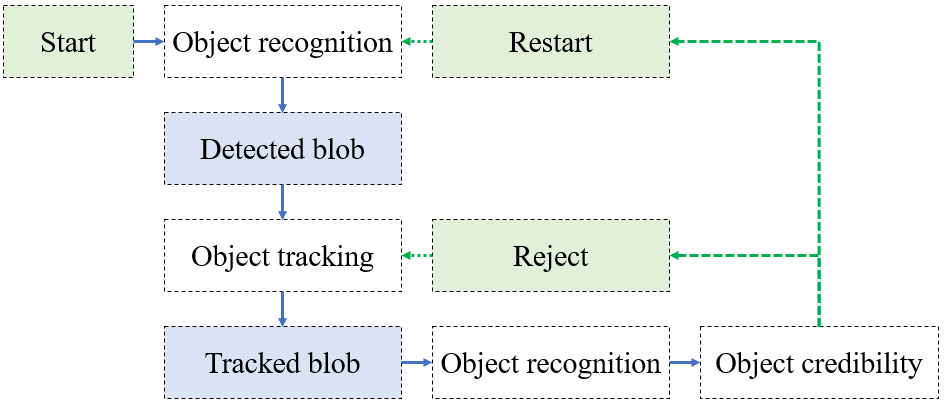
Nguyễn Phương DuyThe following video shows the hybrid active vision system designed for this prosthesis. This system consists of an object tracker and an object recognition system that finds an object of interest, chooses the most appropriate grip pattern and waits for the user consent before attempting to grab the object. While the user moves closer to the object, the wrist will be calibrated.
This is the first endeavor to create the real-time tracker for the next step.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.