 Rodolfo
RodolfoThere has been a quiet period here but it was mainly because we were working on hardware issues... that were indeed hard. We will at least share that the schematic using ESP32 in a MESH network was tested and the IR location multiplexed was also a success.
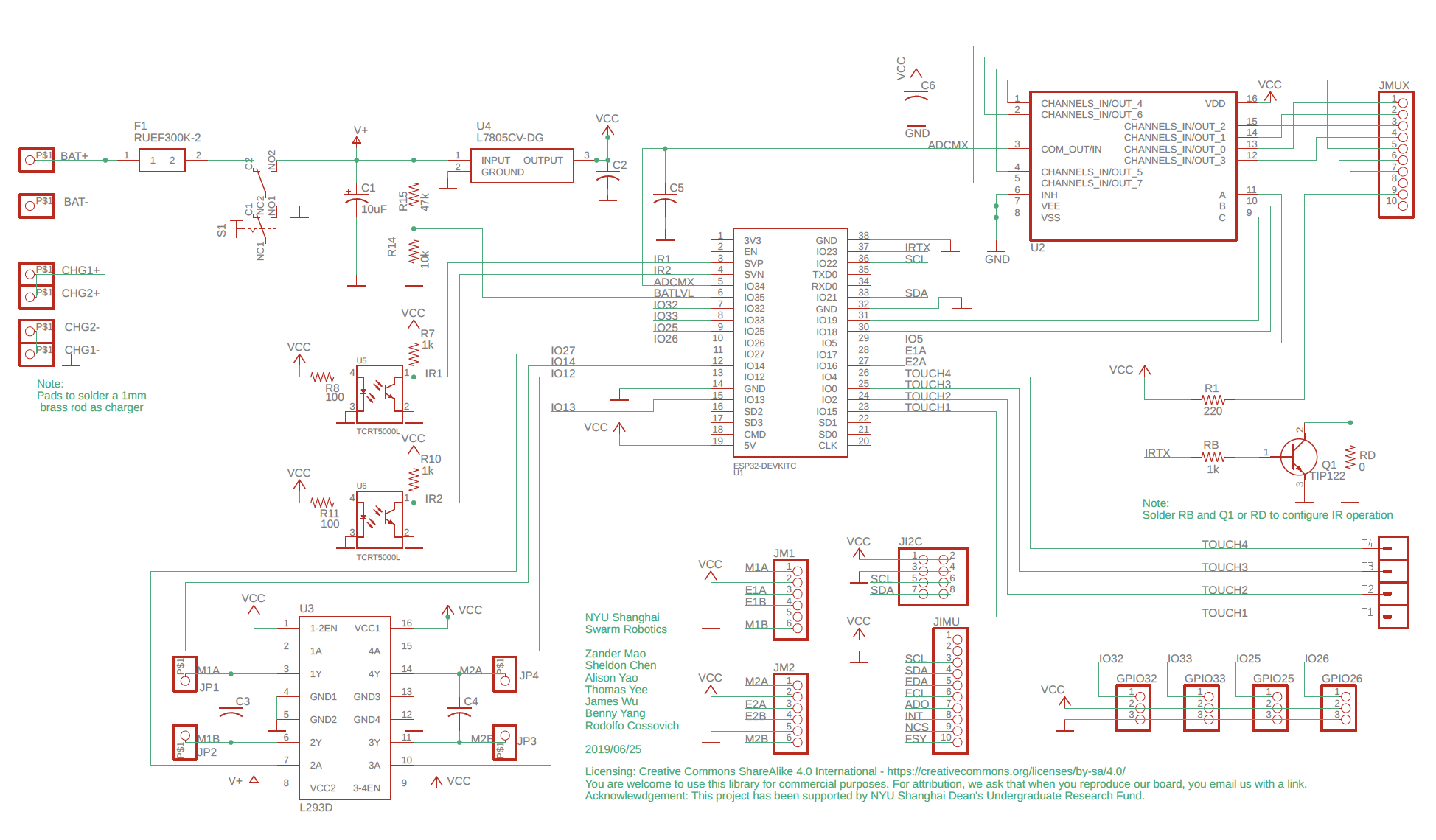
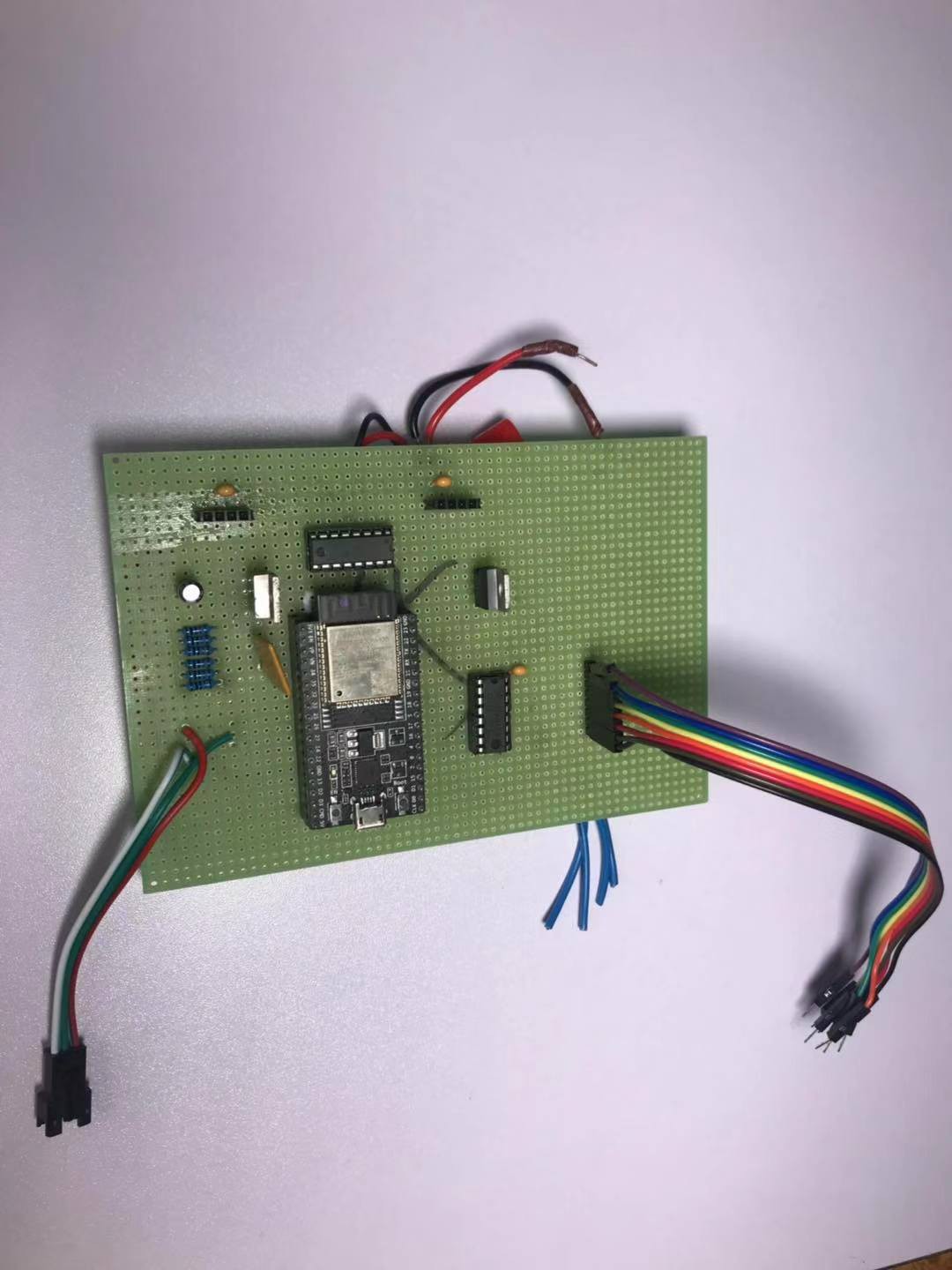
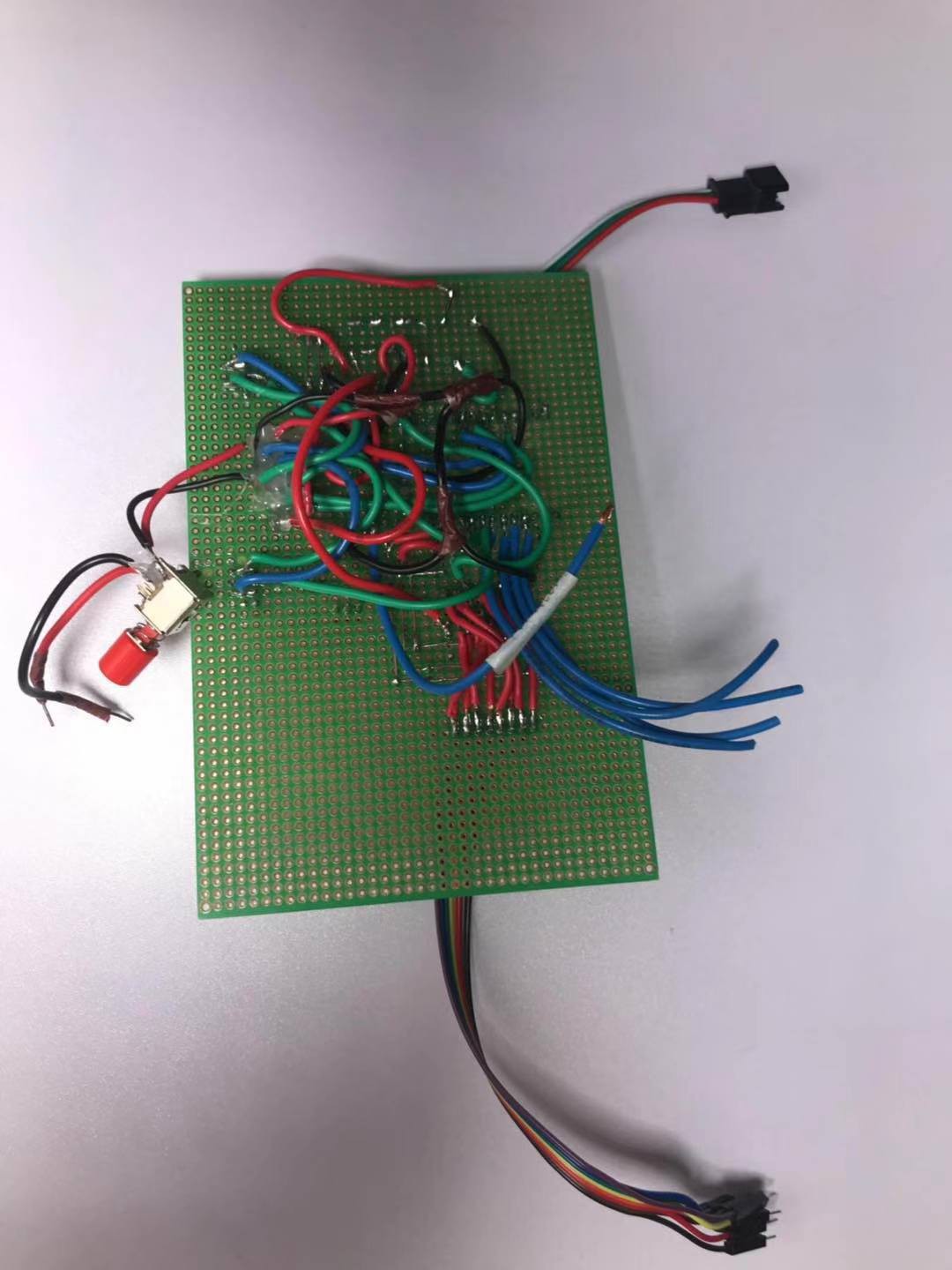
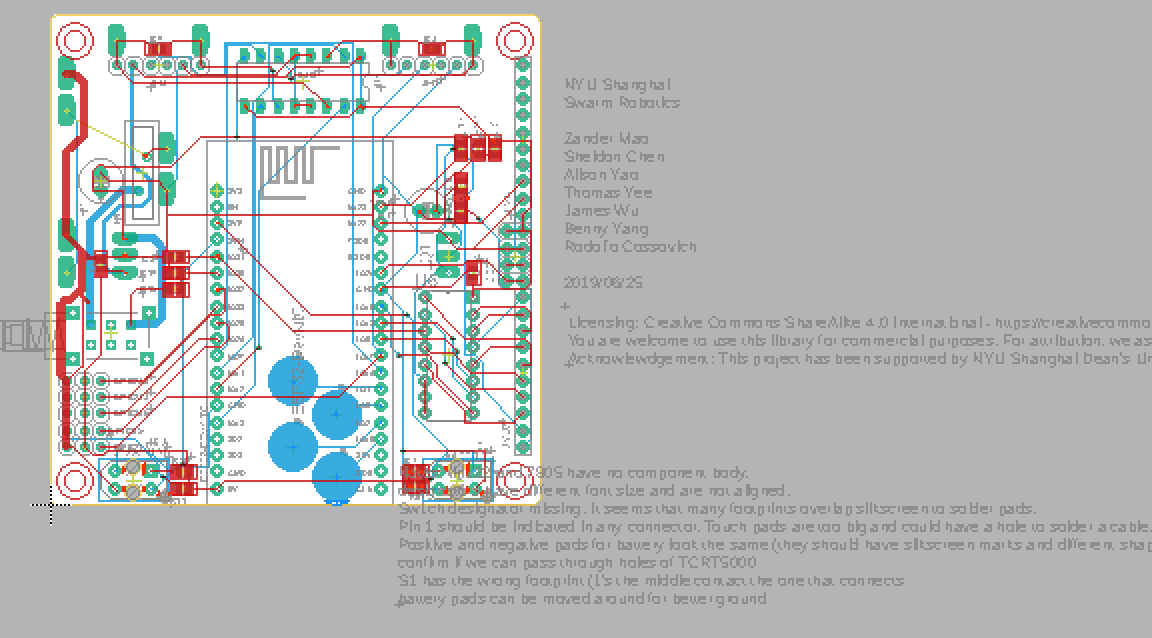
The steps we are working on now are to bring to life a whole robot. In order to do this, we used Eagle to design a Schematic, later hard wired it to a perfboard and designed a PCB based on that test. After running a small test on our Protomax, we are now waiting that the factory ships the prototype boards. Let's keep fingers crossed!
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.