 Omri Ben-bassat
Omri Ben-bassat
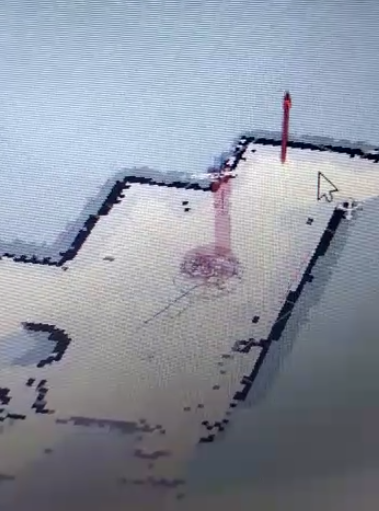
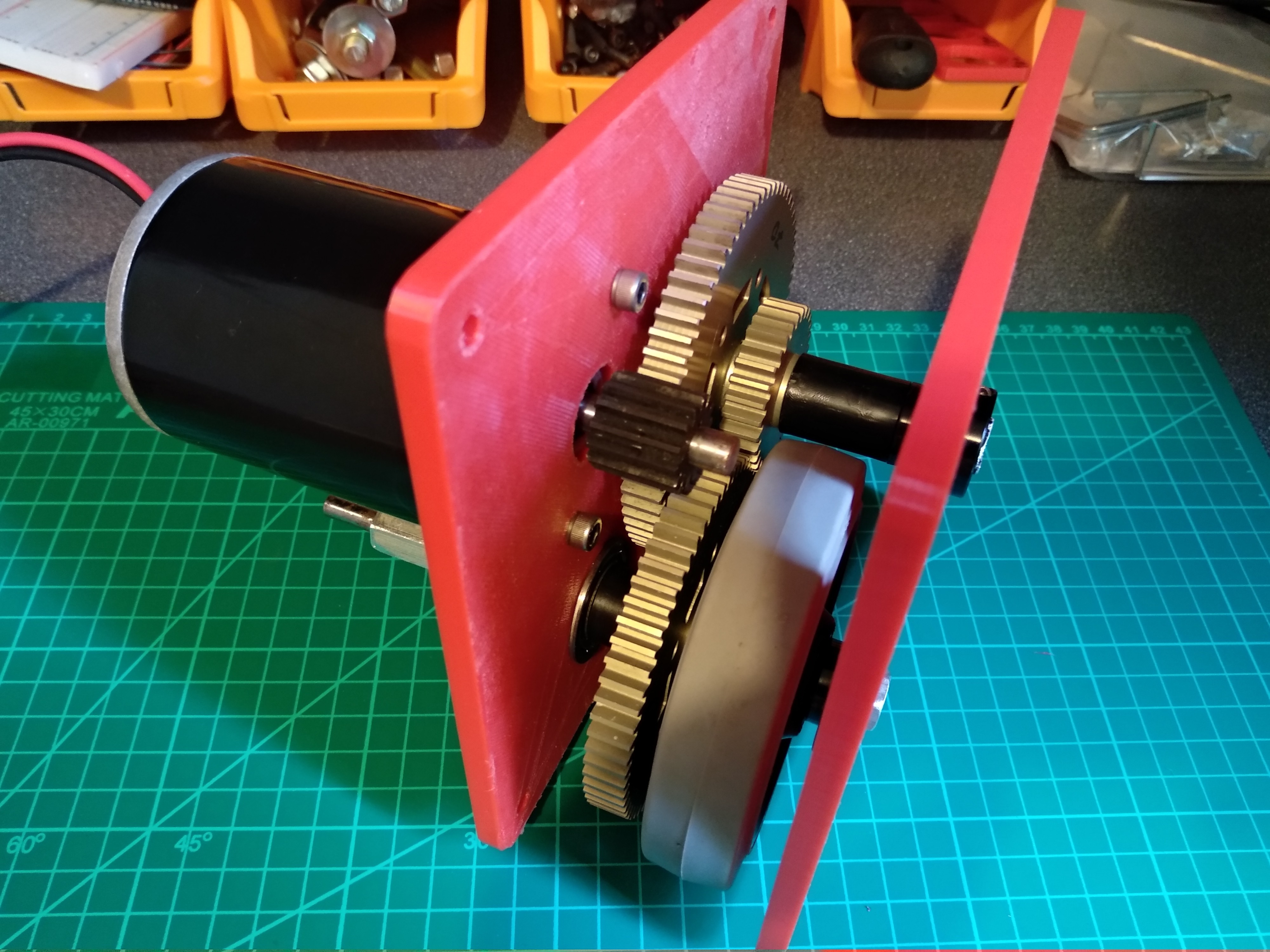
BACKGROUND: This project is actually the incarnation of old home robot called SHOKI(R.I.P). Old SHOKI was made using laser-cutted MDF plates and equipped with powerful diff-drive drive train using VEXPro parts, on-board RPi running ROS Kinetic nodes which published the output of multiple sensors that you can see in the such as RPILIDAR a1 laser sensor, 6-DOF IMU, Orbbec Astra 3d camera. sadly old SHOKI rotten last winter(MDF might not have been the best choice... haha) so I decided to break it apart, save the sensors / electronics / mechanical parts and rebuild it, this time in pure 3d-printable PLA / ABS! In the picture bellow: screenshot taken from RViz of old SHOKI mapping my apartment.

Hi friends, do you publish your code on github? thank you for your sharing