 Michael G
Michael GAll Four Legs and Continuing the Design of Spike’s Body:
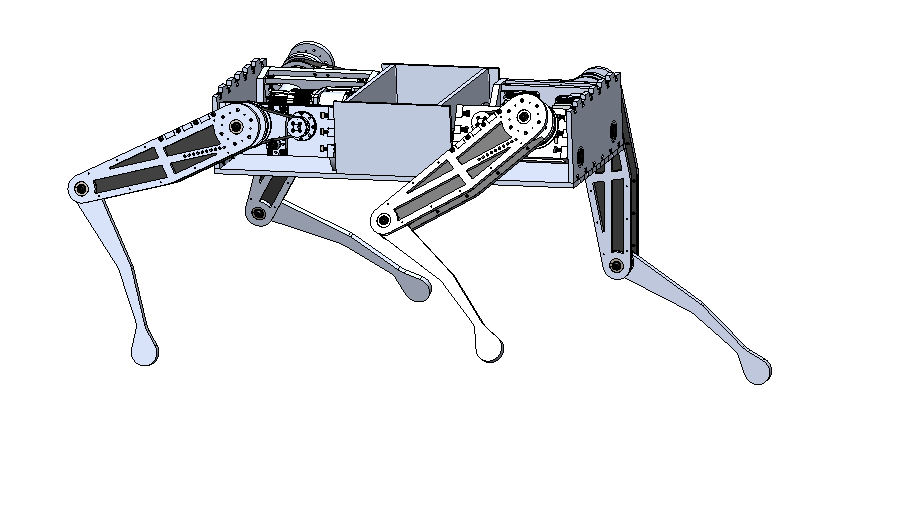
Next up, Spike needs two more legs. As discussed in the prior log, all this involves thanks to the modular design is to mirror the Leg Motor Box Assemblies relative to the Leg Motor Box Assemblies relative to the other side (front-back), as the legs all bend in the same direction at the olecranon joint. At this point, I also found it worthwhile to add side plates to Spike’s center to help retain the battery compartment.
It’s also apparent that Spike’s doesn’t have much room left for the many stepper drivers and onboard electronics. This is because I plan to add these later to the exterior of Spike, and protect them with sheet metal panels, as I imagine I’ll spend quite a bit of time under the hood of Spike. In the picture below, you can see Spike with all four legs for the first time – finally starting to look like something!
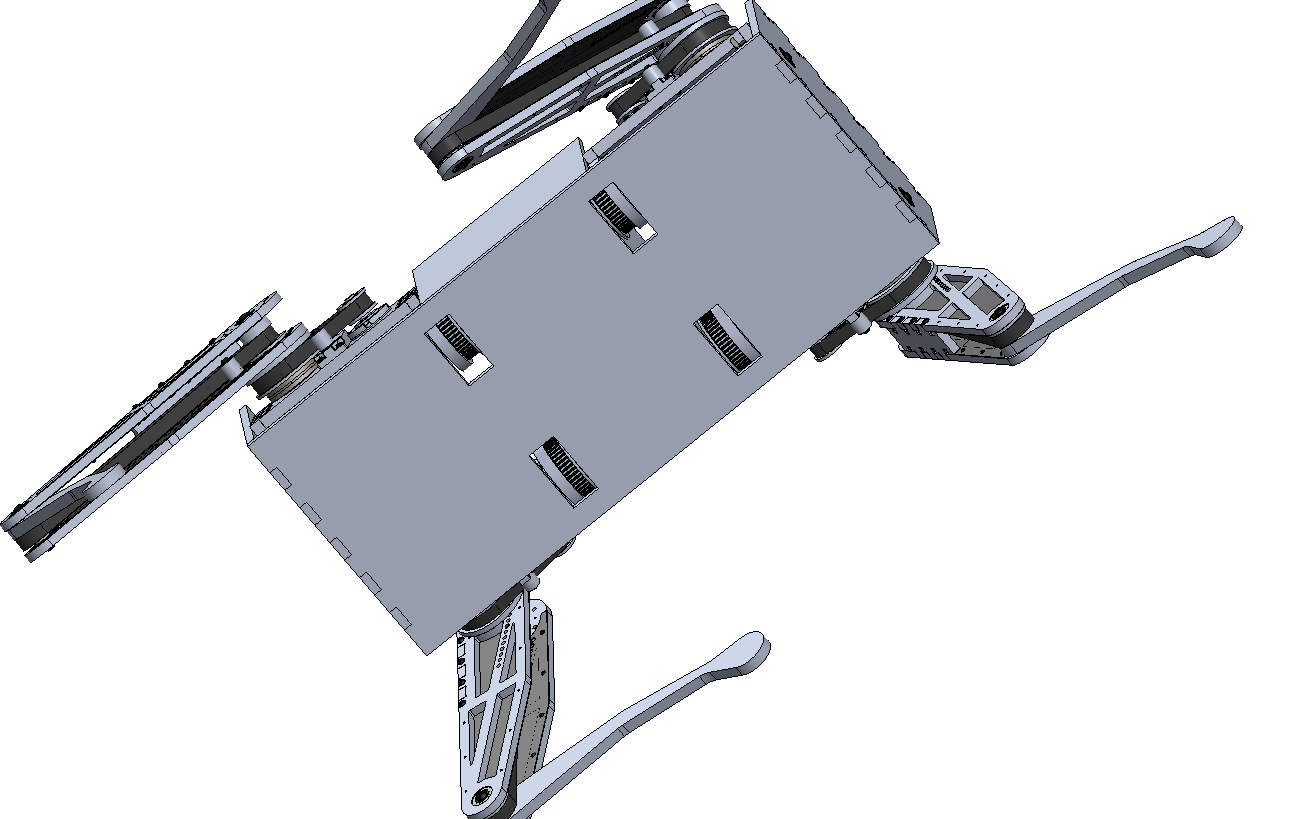
I also noticed an additional clearance issue with the Leg Motor Box Assemblies; the pulley of each assembly is conflicting with the Lower Main Plate. To remedy this, I designed a cutout four each Leg Motor Box pulley. Since these parts are designed to be either waterjet or CNC-milled, adding this through cut-out feature adds very little effort or cost.
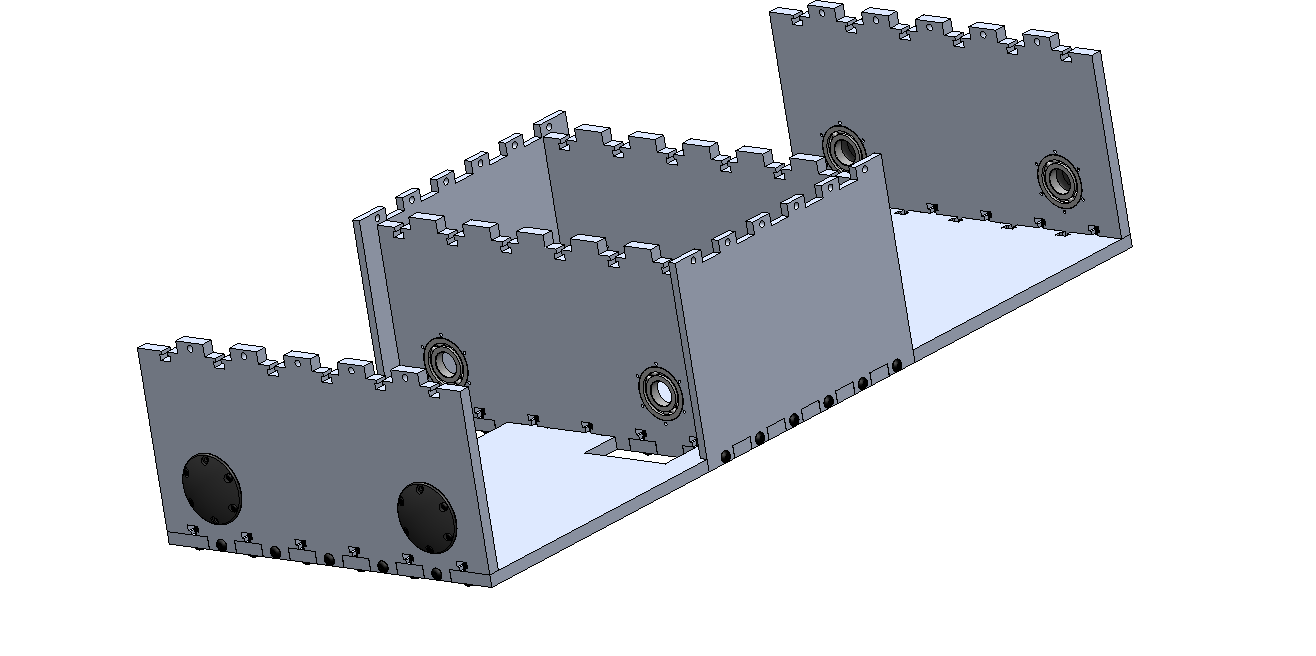
Now that Spike’s body is coming together, I decided to invest some time adding the box-joints and bolt-nut holes that will allow Spike to be easily assembled. Similar to the upper legs, Spike’s body is designed specifically for easy assembly, with all the features necessary to hold panels together cut during the waterjetting process when the panels are made. Also, as the four outermost bearings that allow for hip motion were still exposed, I designed a smaller 3D-printed bearing cover to shield the bearings from any contaminants.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.