 Tim Wilkinson
Tim WilkinsonTo assemble one robot joint you'll need for following printed parts:
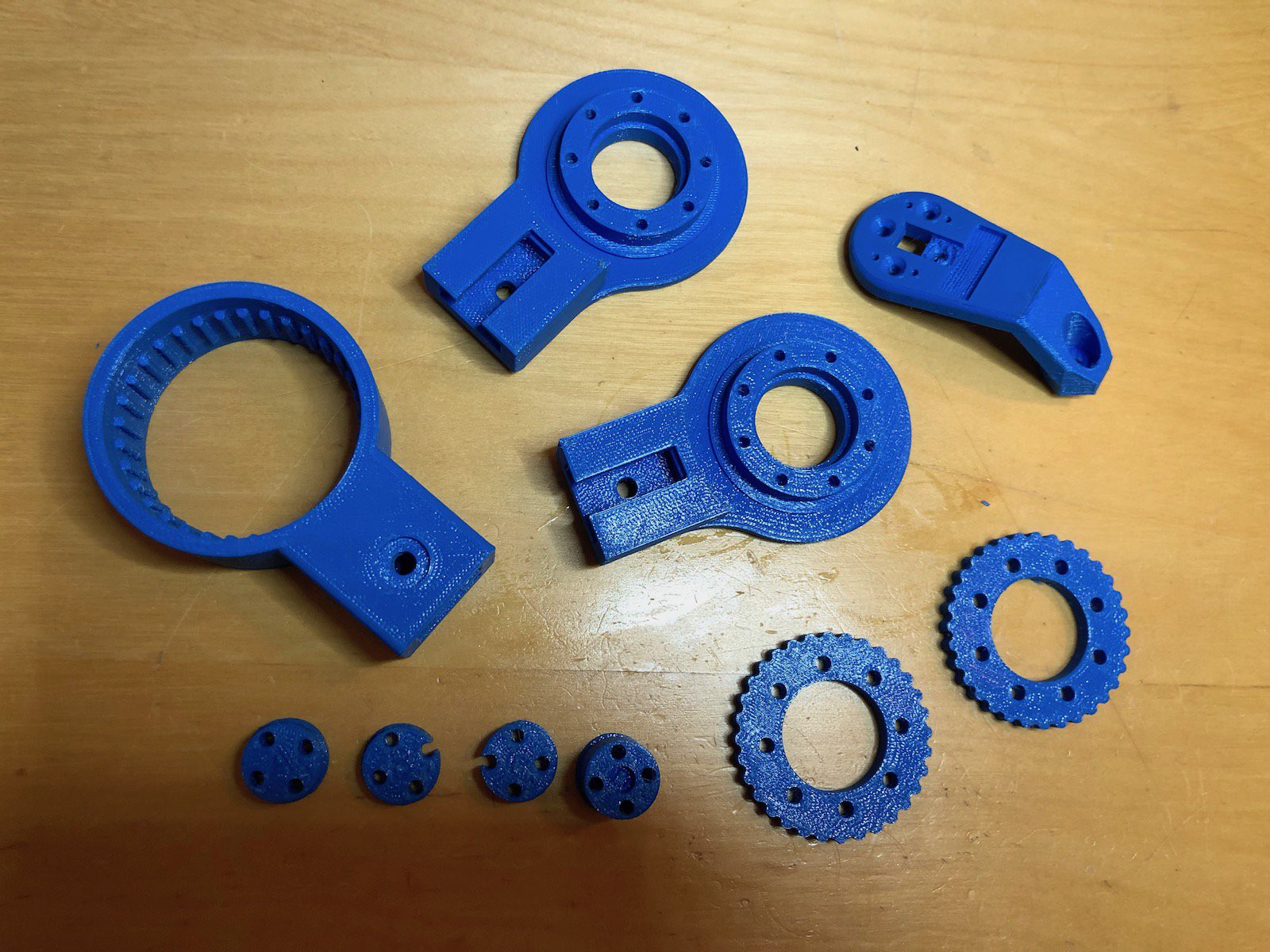
Almost every part is unique, except for the two outer supports (those keyhole shaped parts with the 8 holes in a circle). You will also need a few extra pieces of hardware:

These are (with Amazon links):
- 2x 6808 bearings
- 4x 6803 bearings
- 4x M3 40mm screws
- 3x M2 6mm screws
- 1x M2 4mm screw
- 8x 2.5mm x 25mm steel dowel pins
- 24x M3 nylon washers
You also need a motor. I'm using these:
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.