
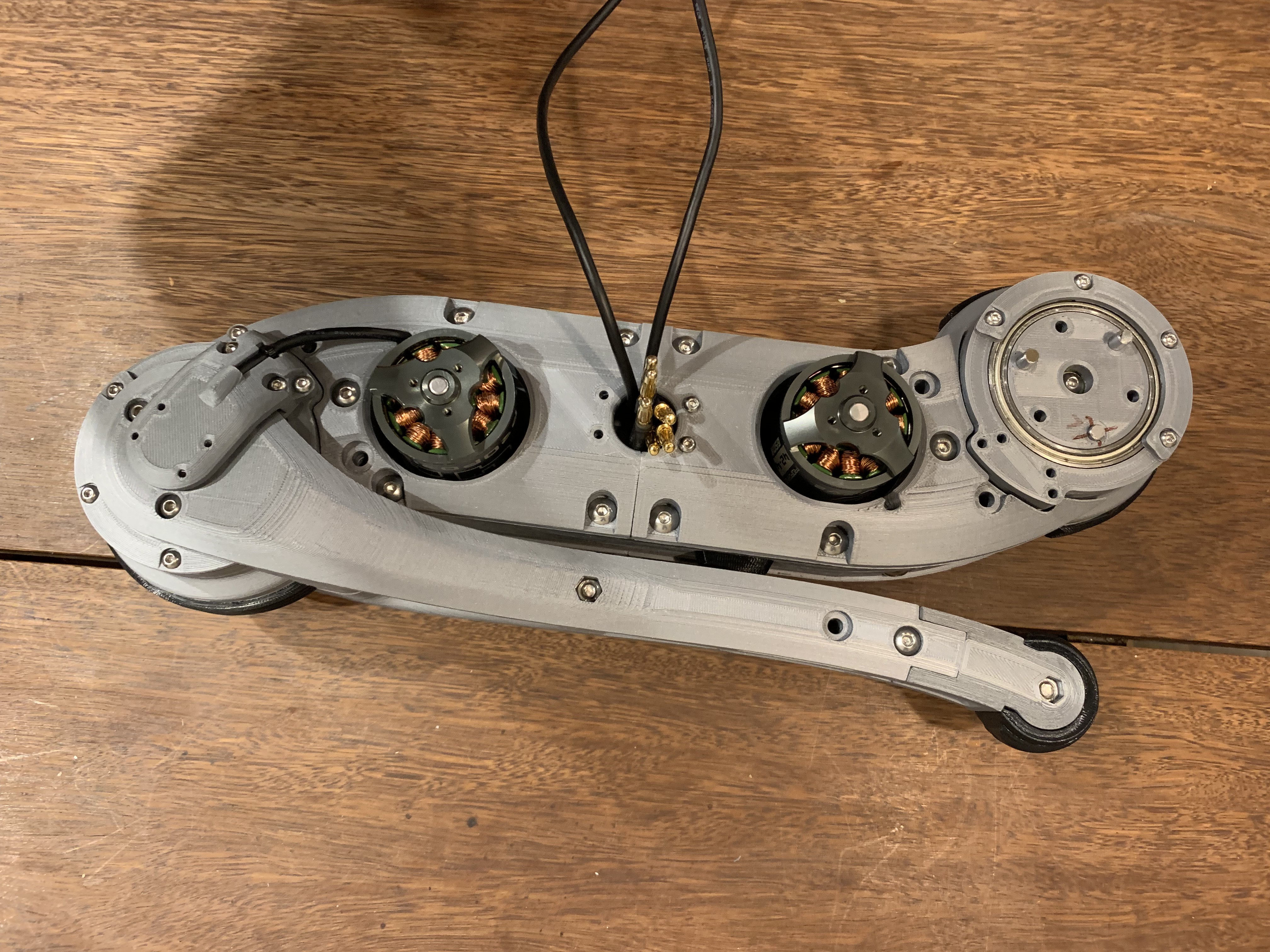


This update is very late as I finished printing and building the hip joint towards the end of July last year just as I started my first semester of uni and got a bit preoccupied. I am very happy with the way the parts went together and work. Everything feels very sturdy and the joints are both smooth.

This is a stand my dad and I built so I could start to program it to move without it sitting on the table.
I was having trouble getting my teensy 3.6 to talk properly to the Odrive and got a little demotivated on that front as the design and building is more my thing. However I did get it to move one joint at a time using the computer interface to the Odrive, I will put a video of this in the 'uploads' section.
Since the end of my uni semester I have begun working on the leg again. Mainly upgrading parts with better designs and better materials as well us upgrading the electronics to try narrow down the issues I am having with the Odrive/Teensy. I will post an update on these upgrades later when Im happy with them.
After I have finished with these upgrades and I go to reassemble the leg I will write up a parts list and a loose assembly guide and post the STL files for all of the parts. I feel selfish for not posting the Fusion360 files but they are a bit of a mess to be honest and I guess I havn't seen the light of open source. Maybe in the future :)
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.