 Etienne
EtienneFor the remote controller, I didn't want to build a physical remote or use infrared remote (doesn't allow analog control). Instead, I wanted to used a smartphone.
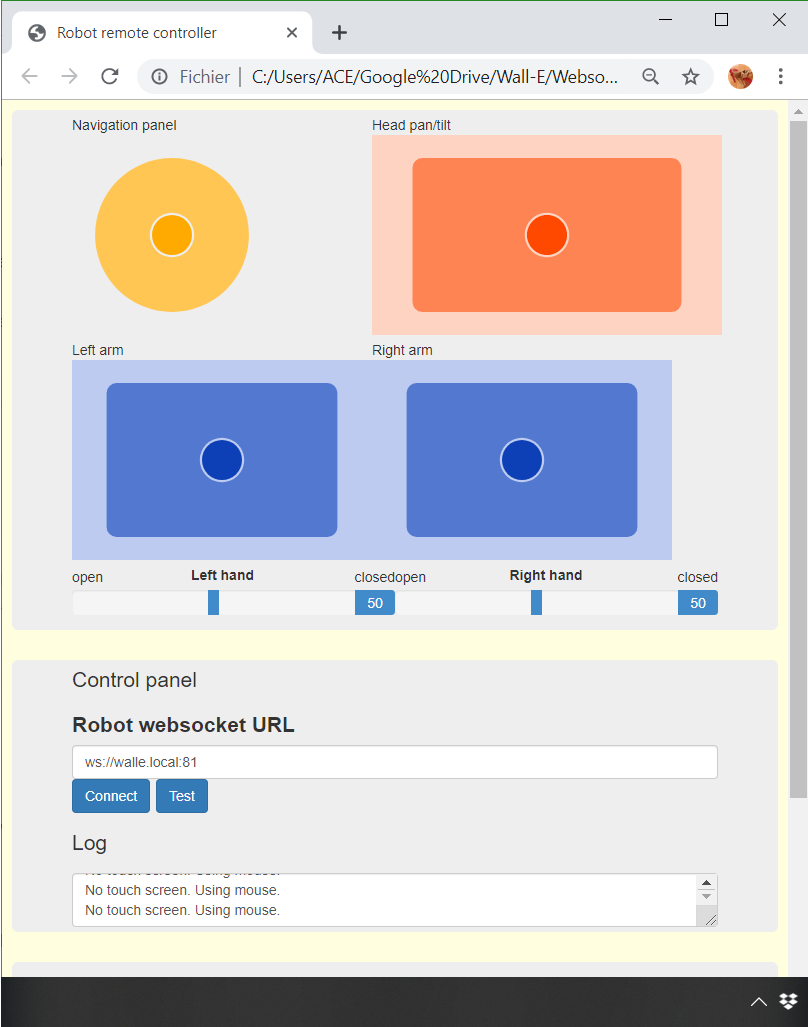
I developed a GUI in HTML, Javascript, and Bootstrap/CSS for a modern look. Thanks to Bootstrapp, the overall layout adapts to computer screen as well as smartphone screen.
I use several joystick controllers for controlling paired degrees of freedom. Blue joysticks control the shoulder elevation & extension joints. When a mouse click, or finger touch, drags the stick, the javascript code converts screen touch/click position to the [-100% ... 100%] range; then a function sends all DoF position commands to the robot over websocket every 200ms.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.