dannyvandenheuvel
dannyvandenheuvel-
PART 3 'THOR ROBO-GUI'
11/29/2016 at 15:20 • 3 commentsFirst version V0.1.11.2016 to download at hackaday! for Windows,Mac and Linux. Linux beta testers needed to give feedback!
Did workout some routines to play with cubes, next will be some other materials like a table,box... will be continue :) -
PART 2 'THOR ROBO-GUI'
11/20/2016 at 22:52 • 0 commentsPlaying with cubes :)
-
FIRST UPDATE 'THOR ROBO-GUI'
11/19/2016 at 00:22 • 4 commentsFirst update graphical GUI controller for THOR robotic arm. Still in progress... Inverse kinimatics build in.
-
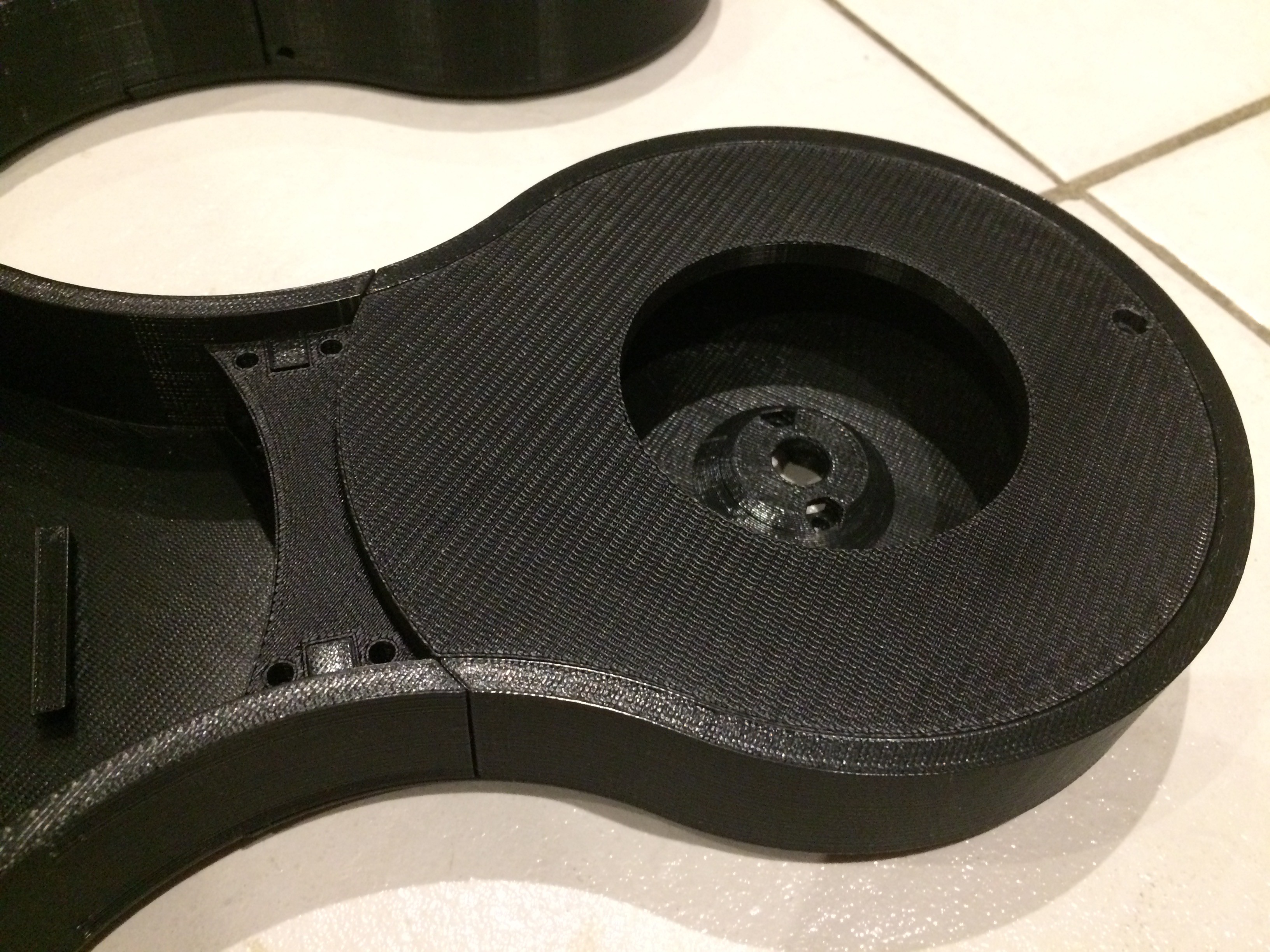
All the 3D parts, checkup to see everything fits nicely :)
10/26/2016 at 21:16 • 3 comments![]() All parts of two weeks printing, at last job done :) (special modified parts included)
All parts of two weeks printing, at last job done :) (special modified parts included)![]() Base parts (wrong motor viewed, sorry)
Base parts (wrong motor viewed, sorry)![]() This time with correct motor !
This time with correct motor !![]() Everything fits correctly
Everything fits correctly![]() Looking good! This one has been modified, height has been smaller then the original piece.
Looking good! This one has been modified, height has been smaller then the original piece.![]()
Modified pieces to fit on a smaller 3D printer (most of them will be no problem anymore)
Overlapping pieces to keep it at strong as one piece, has to be glued togetter.![]()
As you can see nicely fitting togetter
![]() Yeah, good accuracy so far!
Yeah, good accuracy so far!![]() The two sides
The two sides![]() Another modified piece split into 2 pieces
Another modified piece split into 2 pieces![]() Put togetter to one piece
Put togetter to one piece![]() And again two pieces to be connected to one piece
And again two pieces to be connected to one piece![]() I am very glad that the printing has been perfectly been finnished
I am very glad that the printing has been perfectly been finnished![]() The assembly can be started in the comming days!
The assembly can be started in the comming days!![]() Will be continued...
Will be continued... -
Some progress....
10/25/2016 at 01:04 • 0 comments-
Robot 'Thor' rendering
09/25/2016 at 12:36 •
0 comments
After the modification I made a render of my personal robot :) from
the moment everything has been printed and assembled I will send
everything to Gihub,
all parts has to be firmly fitted with each other. There will be a step by step manual to build one for all.
![]()
-
next day printing some robot pieces
09/25/2016 at 11:40 •
0 comments
A new day, some new modified prints, made this one a little bit lower than the original to fit in my printer
![]() Made two pieces that can be shifted over each other and can be glued together
Made two pieces that can be shifted over each other and can be glued together![]()
![]()
![]()
-
Thor robotic arm
09/23/2016 at 20:48 •
0 comments
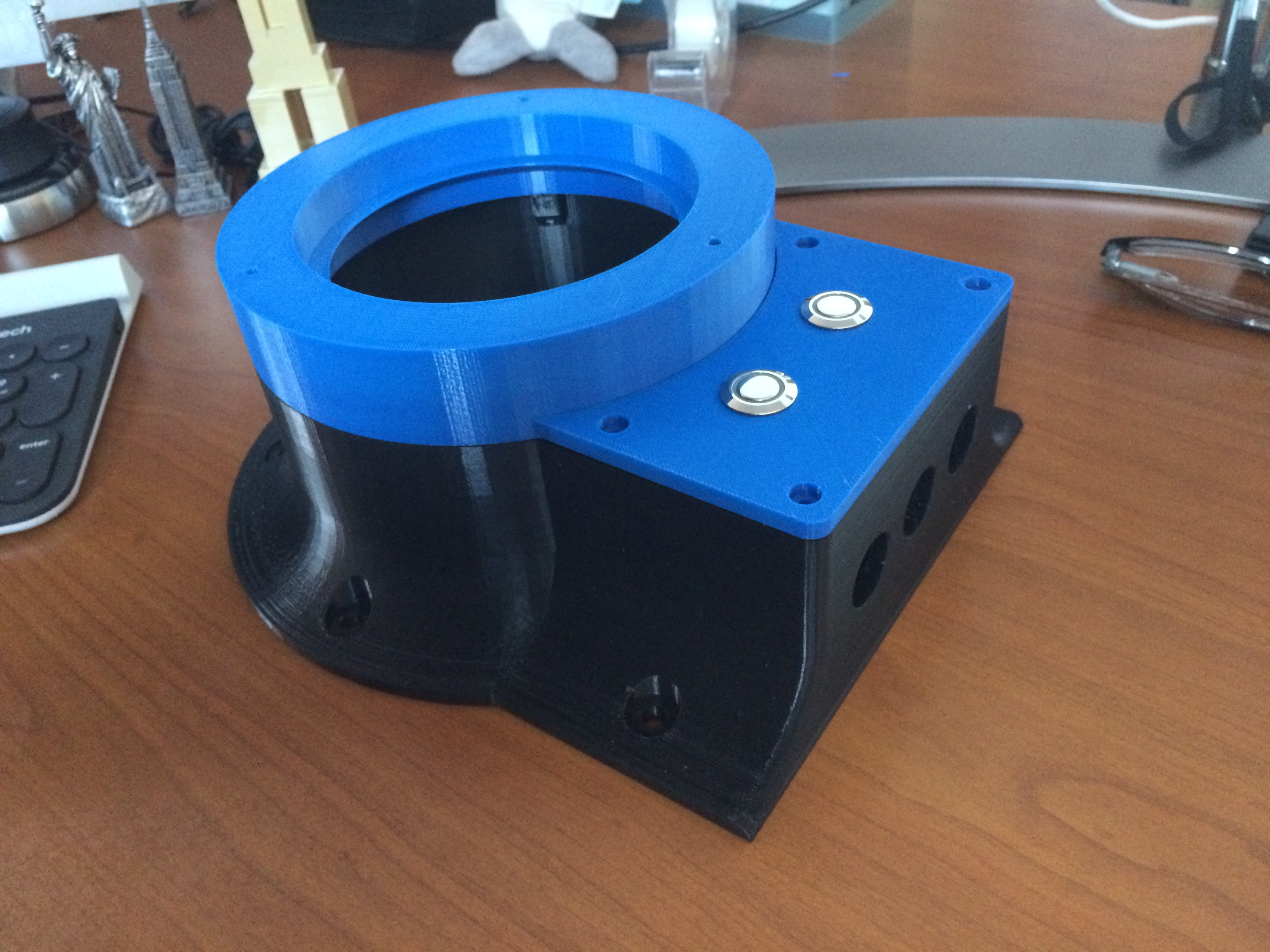
As a team member of the 'Thor' project I am building one myself with some addons and little changes to print it on a smaller enviroment 3D printer. Everything will be find on github 'Thor' see AngelLM 'Thor' project for more info.
![]() The connector box addon
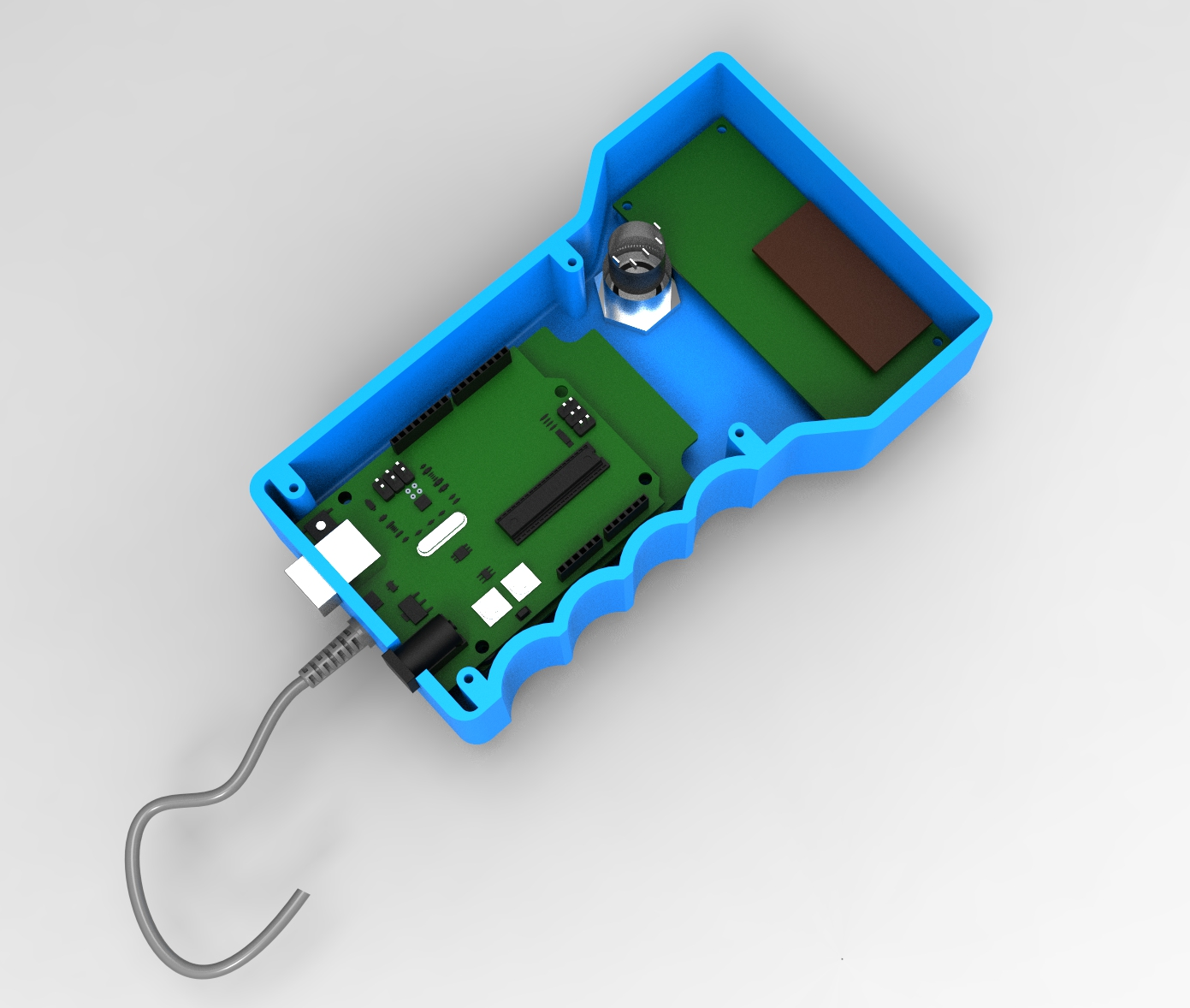
The connector box addon![]() For manual teatching to position of the robot I worked out a hand controller with arduino one serial communication with the main controller arduino mega.
For manual teatching to position of the robot I worked out a hand controller with arduino one serial communication with the main controller arduino mega.![]()
![]()
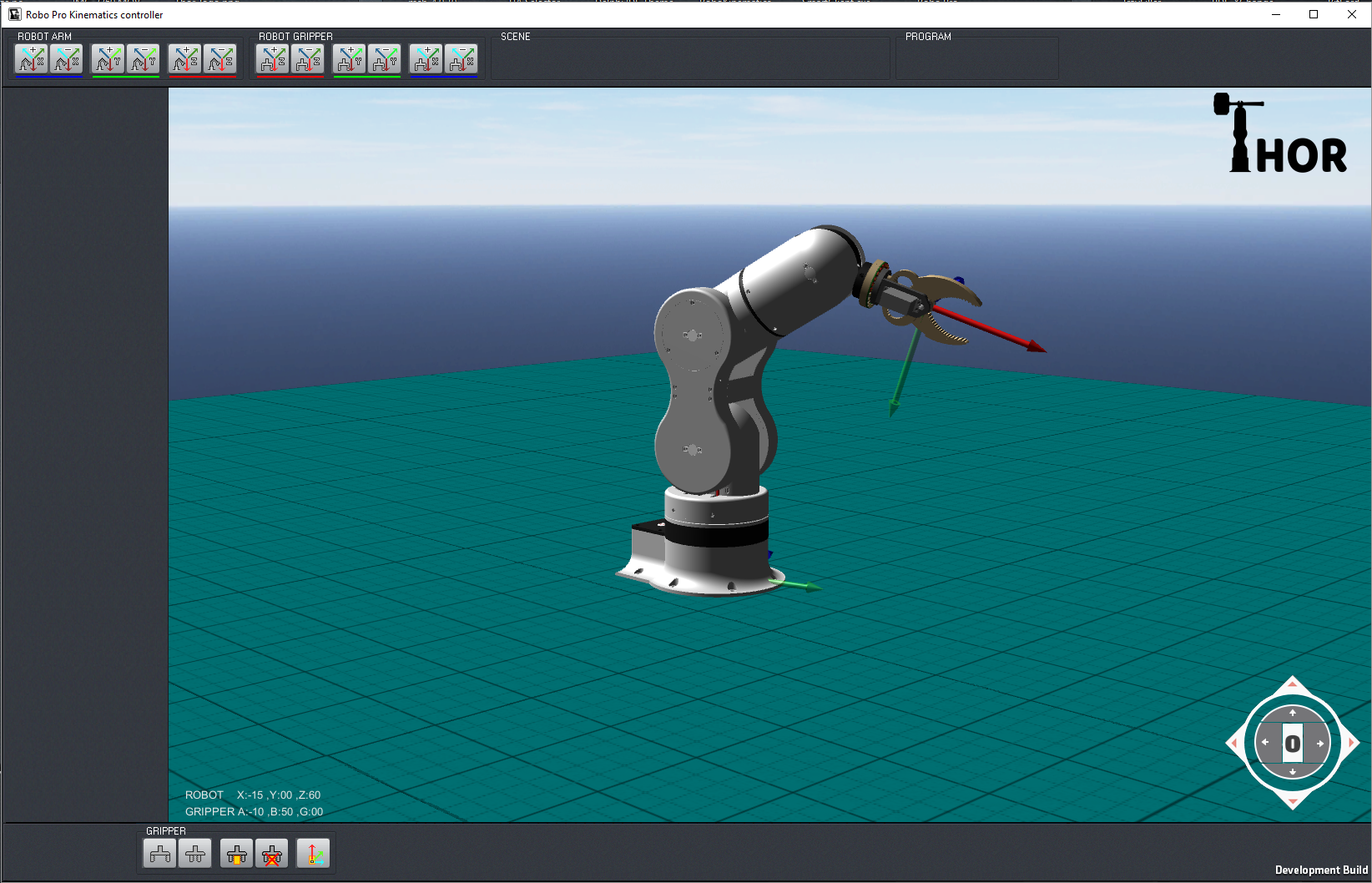
![]() For the moment I am building also a GUI controller to program and simulate 'Thor' from any platform with Unity.
For the moment I am building also a GUI controller to program and simulate 'Thor' from any platform with Unity.![]() I just started to programming, follow me the comming days... weeks :)
I just started to programming, follow me the comming days... weeks :)
-
Robot 'Thor' rendering
09/25/2016 at 12:36 •
0 comments
After the modification I made a render of my personal robot :) from
the moment everything has been printed and assembled I will send
everything to Gihub,
all parts has to be firmly fitted with each other. There will be a step by step manual to build one for all.
-
Electronic sheet
10/25/2016 at 01:02 • 4 commentsFirst draft of the electronics.
There will be a possiblity to communicate with a plc or pc. Communication with plc will be modbus RTU to be compatible
with a whole range of plc's. All GCode will be transfered from de grapical PC GUI controller.
Direct communication with pc will be with USB or TCP/IP , WIFI.
The controller will generate GCODE with subroutines directed by digital IO.
![]() There
will be a hand controller to manualy position to points, by pressing a
button on the controller the position will be written to pc. If all
GCode was been written the program can be saved on pc and be uploaded to
the robot controller.
There
will be a hand controller to manualy position to points, by pressing a
button on the controller the position will be written to pc. If all
GCode was been written the program can be saved on pc and be uploaded to
the robot controller.The robot controller can work without the pc when program has been sended. Pressing de home button shortly will start/stop the robot. By pressing and holding for 2 seconds the robot goes to homing position.
'Thor' robot with addons and GUI
Thor robot based on the author AngelLM
 All parts of two weeks printing, at last job done :) (special modified parts included)
All parts of two weeks printing, at last job done :) (special modified parts included) Base parts (wrong motor viewed, sorry)
Base parts (wrong motor viewed, sorry) This time with correct motor !
This time with correct motor ! Everything fits correctly
Everything fits correctly Looking good! This one has been modified, height has been smaller then the original piece.
Looking good! This one has been modified, height has been smaller then the original piece.

 Yeah, good accuracy so far!
Yeah, good accuracy so far! The two sides
The two sides Another modified piece split into 2 pieces
Another modified piece split into 2 pieces Put togetter to one piece
Put togetter to one piece And again two pieces to be connected to one piece
And again two pieces to be connected to one piece I am very glad that the printing has been perfectly been finnished
I am very glad that the printing has been perfectly been finnished The assembly can be started in the comming days!
The assembly can be started in the comming days! Will be continued...
Will be continued...