 Brenda Armour
Brenda Armour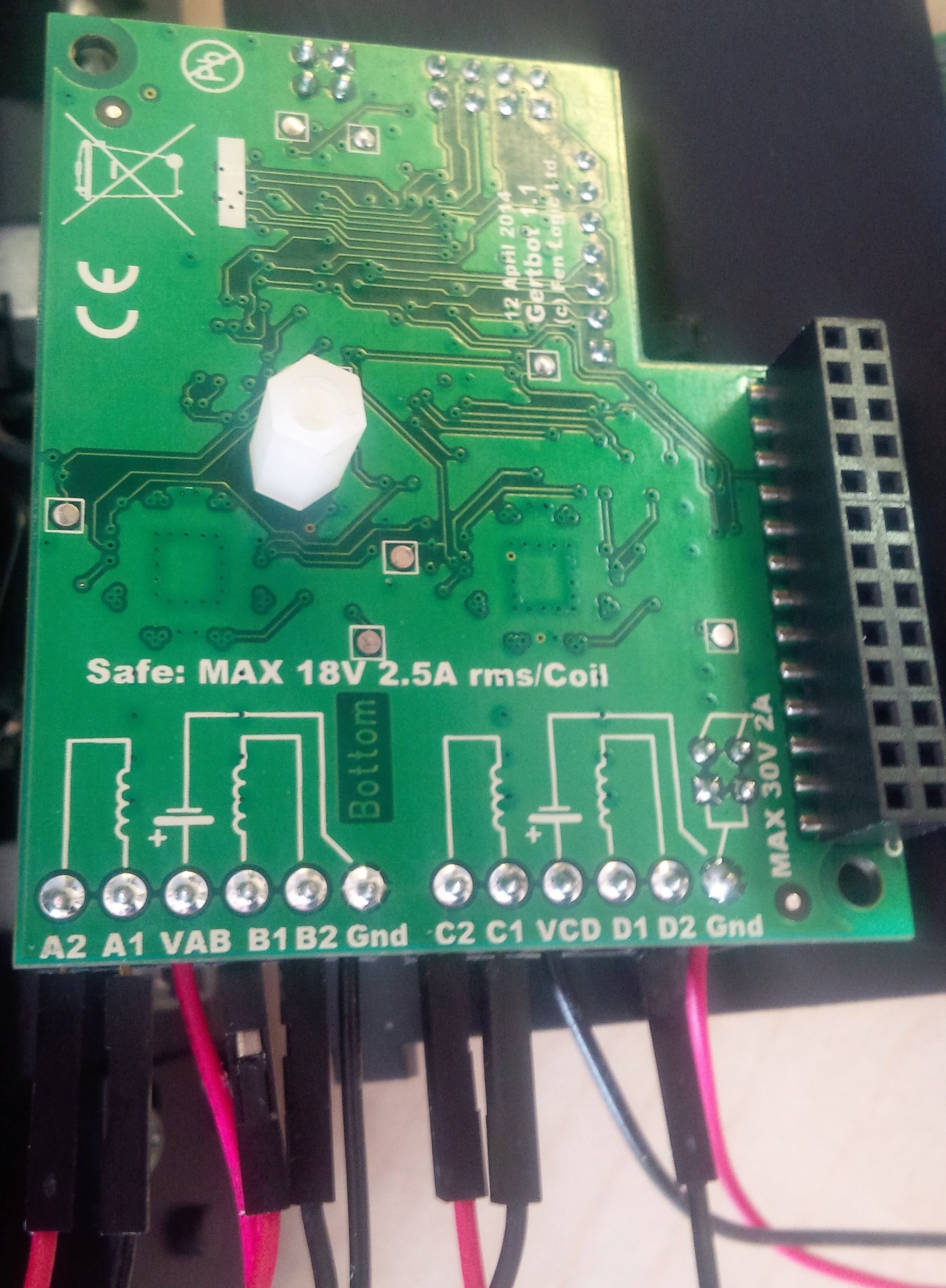
The Gertbot is a daughter board and I decided to use the Raspberry Pi 3 instead of the Raspberry Pi 2. I am using the Stretch image.
The UART port has been used to control the Bluetooth device. So the Gertbot will not work as a addon board. To resolve this you must complete two steps:
Using sudo nano - add to the /boot/config.txt file: dtoverlay=pi3-disable-bt enable_uart=1
Using sudo nano - remove "console=serial0,115200 console=tty1" from the /boot/cmdline.txt file
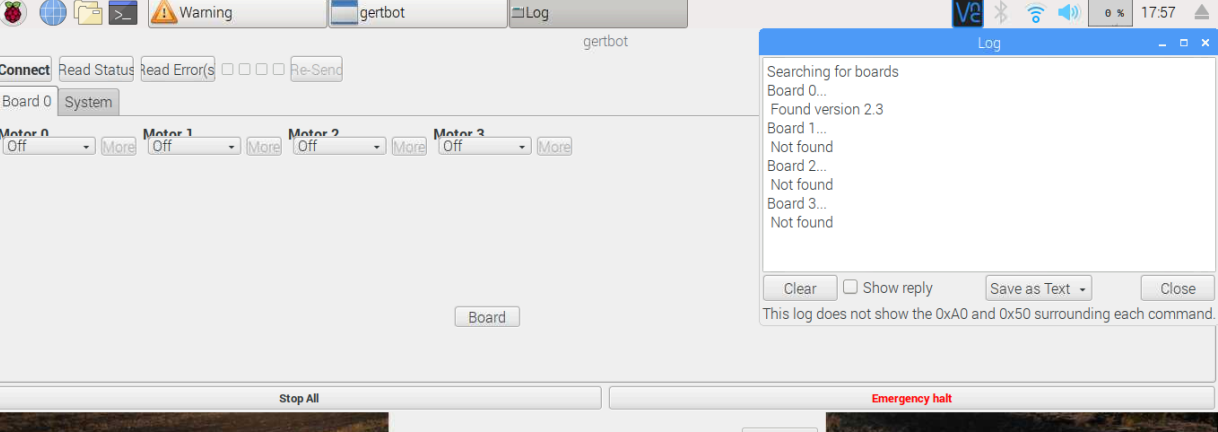
Now you can install the Gertbot GUI for testing the board. The picture above shows the board wired to 4 brushed motors and two 9 volt batteries.
I downloaded Gertbot Debug GUI (.tgz) from here. This is a executable for the Raspberry Pi. I used FileZilla to transfer the file to the Raspberry Pi.
You can also control the Gertbot with a simple python program.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.