 Nishant Agarwal
Nishant AgarwalThe dispenser mechanism the most crucial part of the entire build. It is what sets it aside from other NC robots. The challenge here was to how to make functioning brick dispenser which is not another robotics arm slapped on the gantry. The dispenser should be able to hold a sufficient number of bricks at a time and dispense them one after the other without creating a back and forth movement as in case of a robotic arm. Also it was required that the whole mechanism is able to rotate itself in various direction to account for the orientation of bricks as required in a building project.
Here is what I came up with
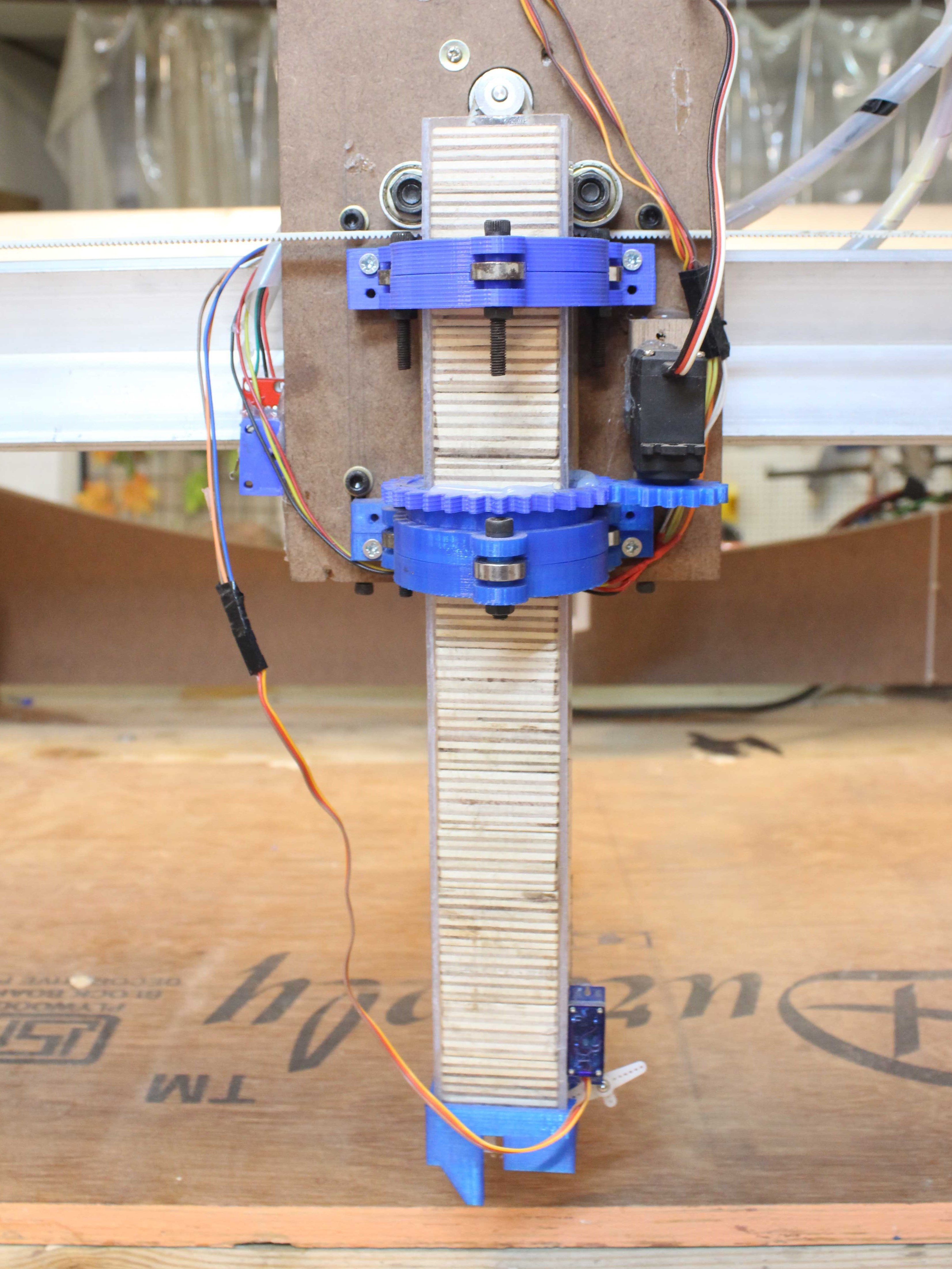
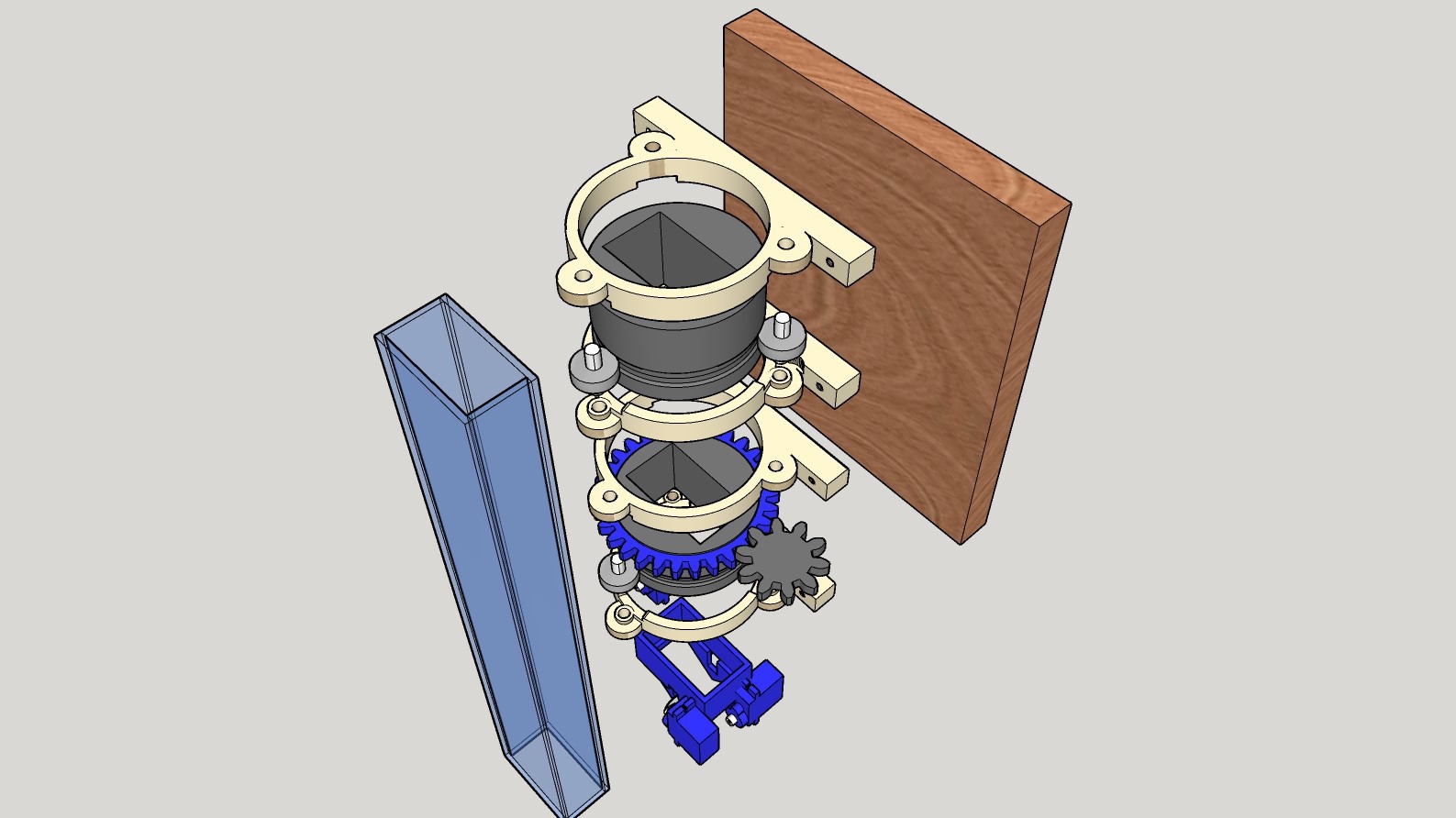
The whole system consists of a feed tube in which the bricks can be restacked once they are about to run out. The axis of rotation of the dispenser tube is right in the centre which makes the whole operation faster and it is also much easier to program the machine as the movement codes need not be modified to compensate for the movement of the tool head.
You can watch the how the dispenser mechanism works in this video.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.