 Cirmall
CirmallIntroduction:
This is a sweeping robot that can be deformed, climbed, and obstacled. In addition to the cleaning function of the ordinary sweeping robot, the robot can also be deformed, with two types of motions: wheel rolling and multi-foot crawling. The robot will operate in different forms according to different land features: on a flat ground, the robot will maintain the wheeled rolling shape and move quickly to clean the ground; when the robot detects obstacles such as thresholds, steps, stairs, etc., the robot will quickly Transform into a multi-foot form and crawl across the obstacle; after the obstacle is completely crossed, the robot will return to the wheeled scroll form to continue the sweeping task. For the detailed function of the work, please refer to the demo video or the document of the product.
Innovation:
This is a deformable sweeping robot. It has two forms of wheel rolling and multi-foot crawling. It can cross obstacles such as thresholds and steps, and can clean complex terrain such as stairs and corridors.
Social problems solved:
The Intelligent sweeping robot solves the problem that the existing robot cannot cross obstacles such as thresholds, steps, stairs, etc., and can help people save cleaning time. It can also help hotels, shopping malls, companies and other places save the cost of cleaning the stairs and reduce costs.
Function:
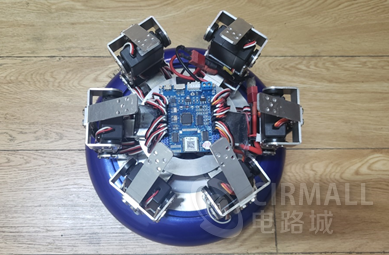
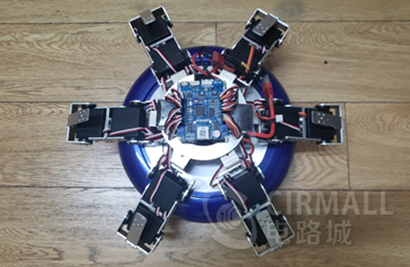
The intelligent sweeping robot has two forms of wheel rolling and multi-foot crawling, as shown in the following figure:
In the wheeled form, the robot has the function of sweeping and mopping, as shown in Figure 2:
(https://player.youku.com/embed/XNDMzMzYxNTA2OA==)
In the six-legged form, the robot has an omnidirectional crawling function, which can crawl forward, backward, horizontal, oblique, and circular, as shown in Figure 3:
(https://player.youku.com/embed/XNDMzMzYxMzg4MA==)
When the robot becomes a six-legged form, the robot's sweeping function can be turned on at the same time, and it can be cleaned while crawling across obstacles, as shown in Figure 4:
(https://player.youku.com/embed/XNDMzMzYxNDMwOA==)
Technical Difficulties:
The robot can be deformed and has two types of motions: wheel rolling and multi-foot crawling. In addition to the cleaning function of the ordinary sweeping robot, it can also become a hexapod robot crawling across obstacles, thereby cleaning the area that ordinary sweeping robots cannot clean.
As shown in the figure below, the machine's six-legged form uses a variety of control algorithms such as self-balancing algorithms and inertial navigation algorithms:
(https://player.youku.com/embed/XNDMzMzYxNTM5Mg==)
(https://player.youku.com/embed/XNDMzMzYxMjg5Mg==)
The robot's visual ability can identify various obstacles, autonomous obstacle avoidance and cross-barrier, while the robot's SLAM composition function enables indoor path planning and autonomous navigation.
In addition, the wheel and foot structure of the robot can be split. When the robot cleans the scene under the sofa and under the bed, it may not be cleaned due to the height of the robot. We can disassemble and separate the foot structure of the robot. The ordinary wheeled sweeping robot reduces the height of the robot to achieve the cleaning function of the scene.
Please refer to the demo video for the detailed function of the intelligent sweeping robot
Video demonstration:(https://www.cirmall.com/circuit/13225)
 Jensa
Jensa
 Mi1es
Mi1es
 Lilia Lobato
Lilia Lobato