 BTom
BTomWe updated our part list with the additional components, refreshed the B6 profile part numbers.
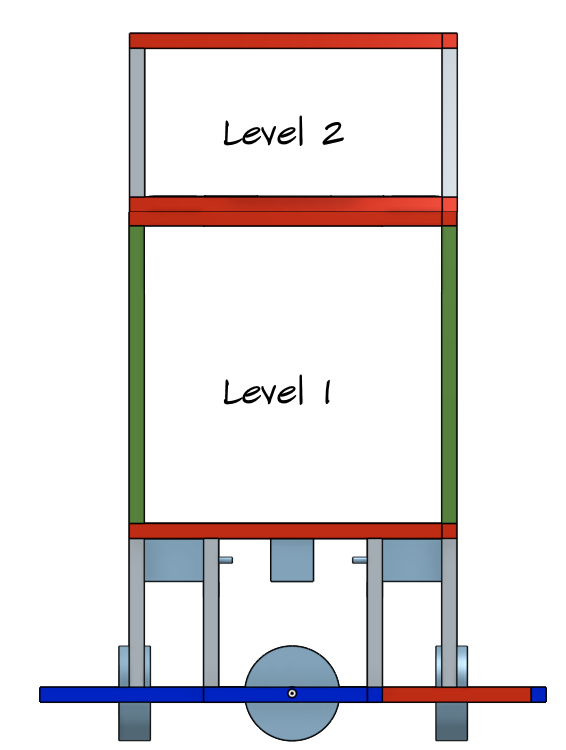
Currently we are working on the extension of the chassis. We build two more level on the robot.
The first one in the future will contains the lift mechanic. It will rise the eye height of the robot. But this isn't needed for the opencv competition so we will return to it later.
The second stage is where we put the electronics, and the OAK-D cameras. We will put the robot head on top of this satage. The new head will be in another project log. Approximately the top of the robot 1 meter above ground.
In previous weeks we received the OAK-D cameras, Mikrotik routers, and the RPI boards.

The robot controller board is ready to be installed too. There will be more information about it later.

At last but not the least this is the first version of the data flow schematic of the robot.

Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.
I dig the diagrams! Thanks for the progress update, best of luck in Phase 2.
Are you sure? yes | no
Thanks for the feedback!
Are you sure? yes | no