 BTom
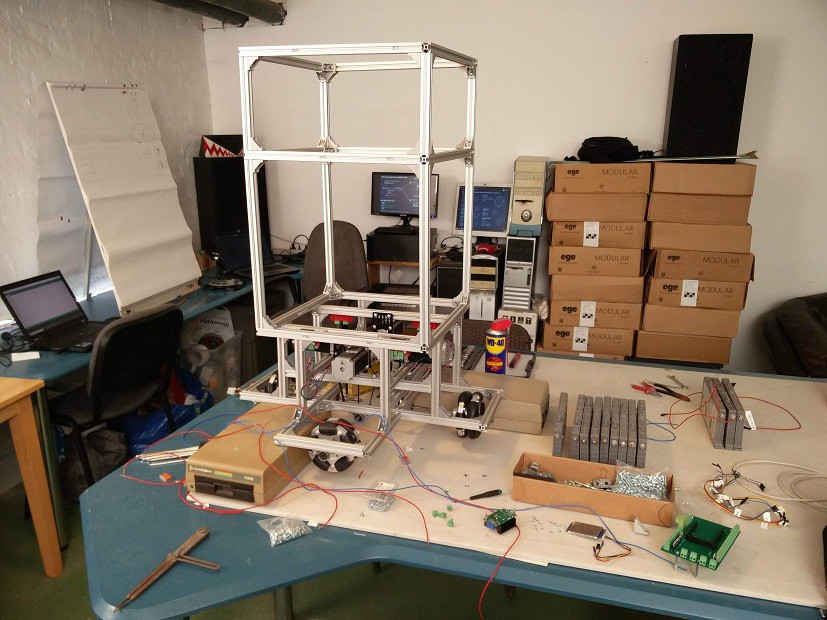
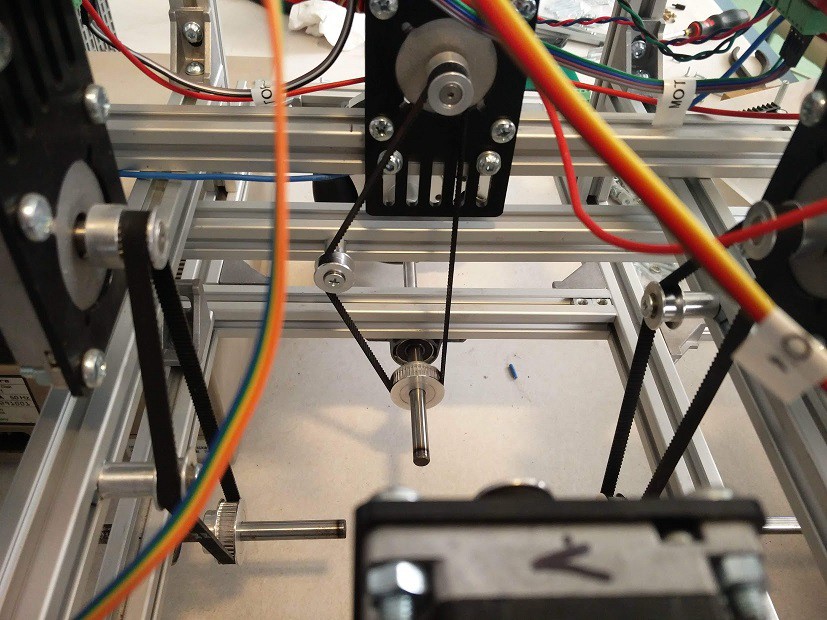
BTomWe finished with the chassis for now, and made belt tensioning.
 |  |  |
The electronic installation is completed with voltage regulator, mikrotik router, programable touch screen, arduino mega with our custom shield. The cable connections to the motors looks fine at first, but at testing we found out most of the cabels are too fragile, so next week we will replace them.
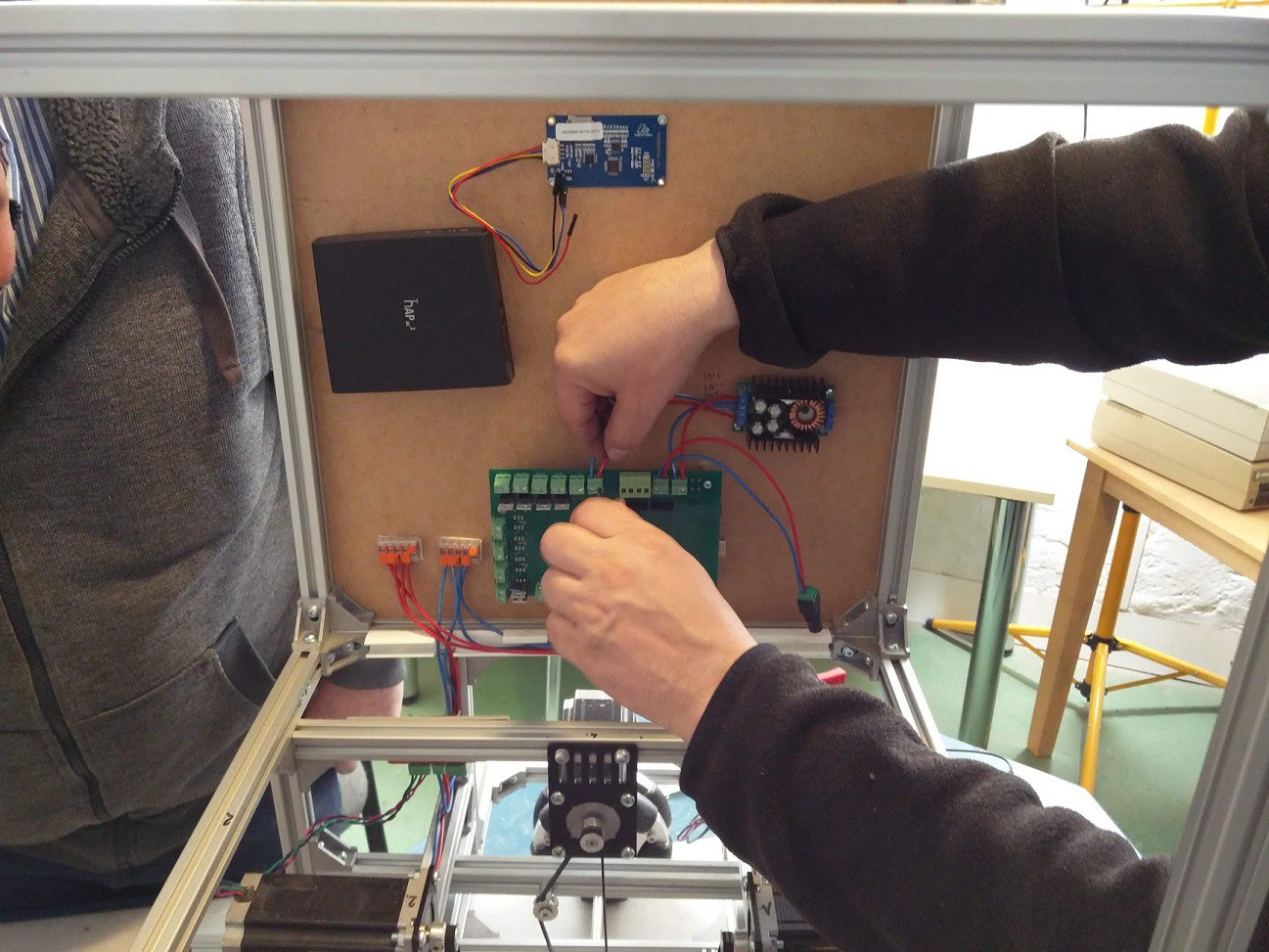
We are using the Mikrotik hap ac2 routers https://mikrotik.com/product/hap_ac2 One on the robot, and one at the remote control PC. These are bridged with nv2 protocol.
Today we placed the head on top of the robot, and it looks like we will have to make some resonance dampening, but it will works.

At programming side we finished with the first version of the arduino mega code, and the python programs for remote controlling (robot and PC side) . We made progress with the new head controlling algorithm we will post details .
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.