 Paul Gould
Paul GouldI forgot to "zero" the knee before starting the inverse kinematic testing. It was the first day on the leg test jig.
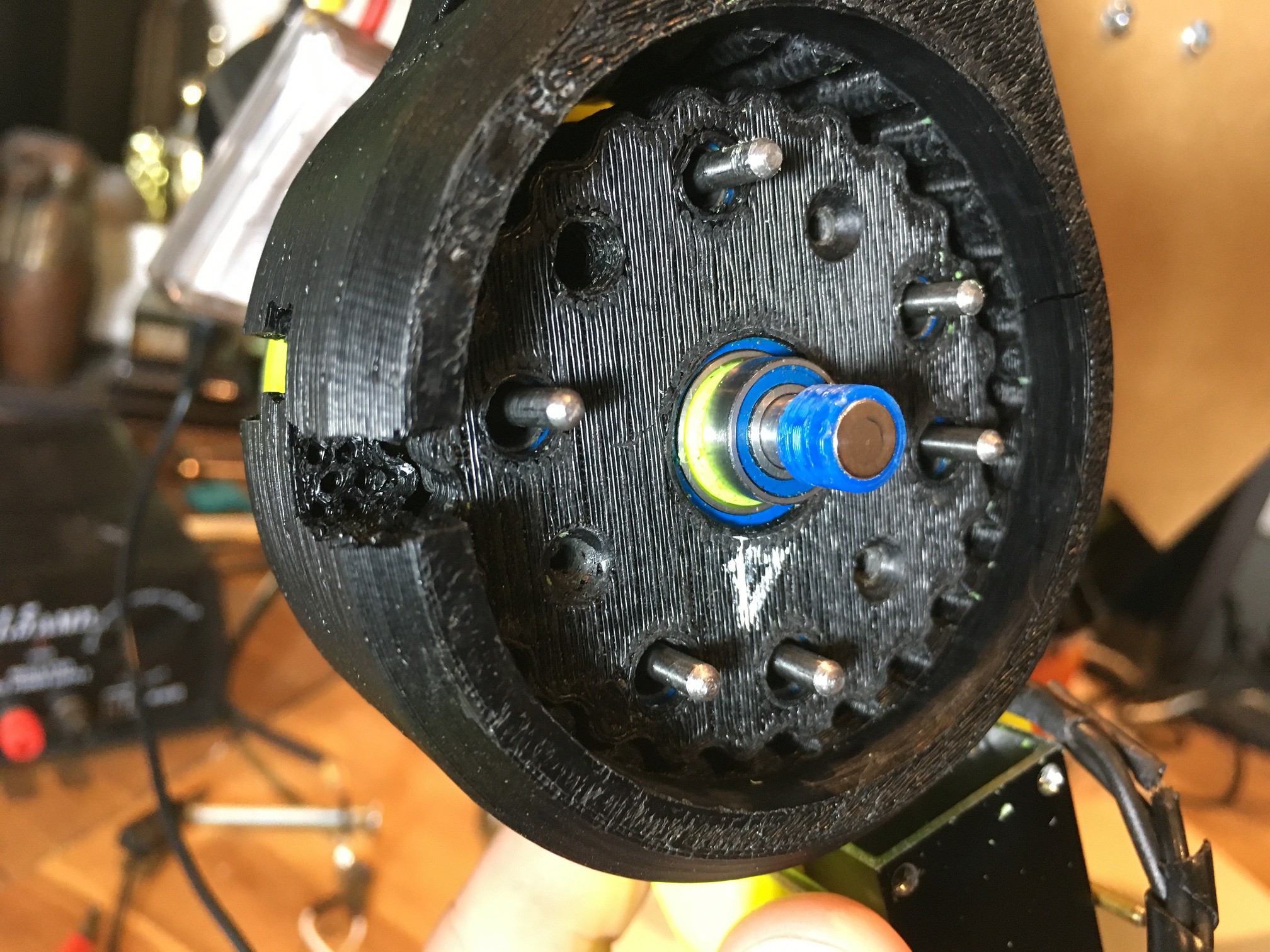
Gears have 85% ABS infill, housing has 50% ABS infill. I will have to add the joint absolute encoder back into the system.


A project log for Simple Cycloidal Robot Leg for Quadruped
Triple Cycloidal Brushless Actuator 25:1 Ratio
I forgot to "zero" the knee before starting the inverse kinematic testing. It was the first day on the leg test jig.
Gears have 85% ABS infill, housing has 50% ABS infill. I will have to add the joint absolute encoder back into the system.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.