0%
0%
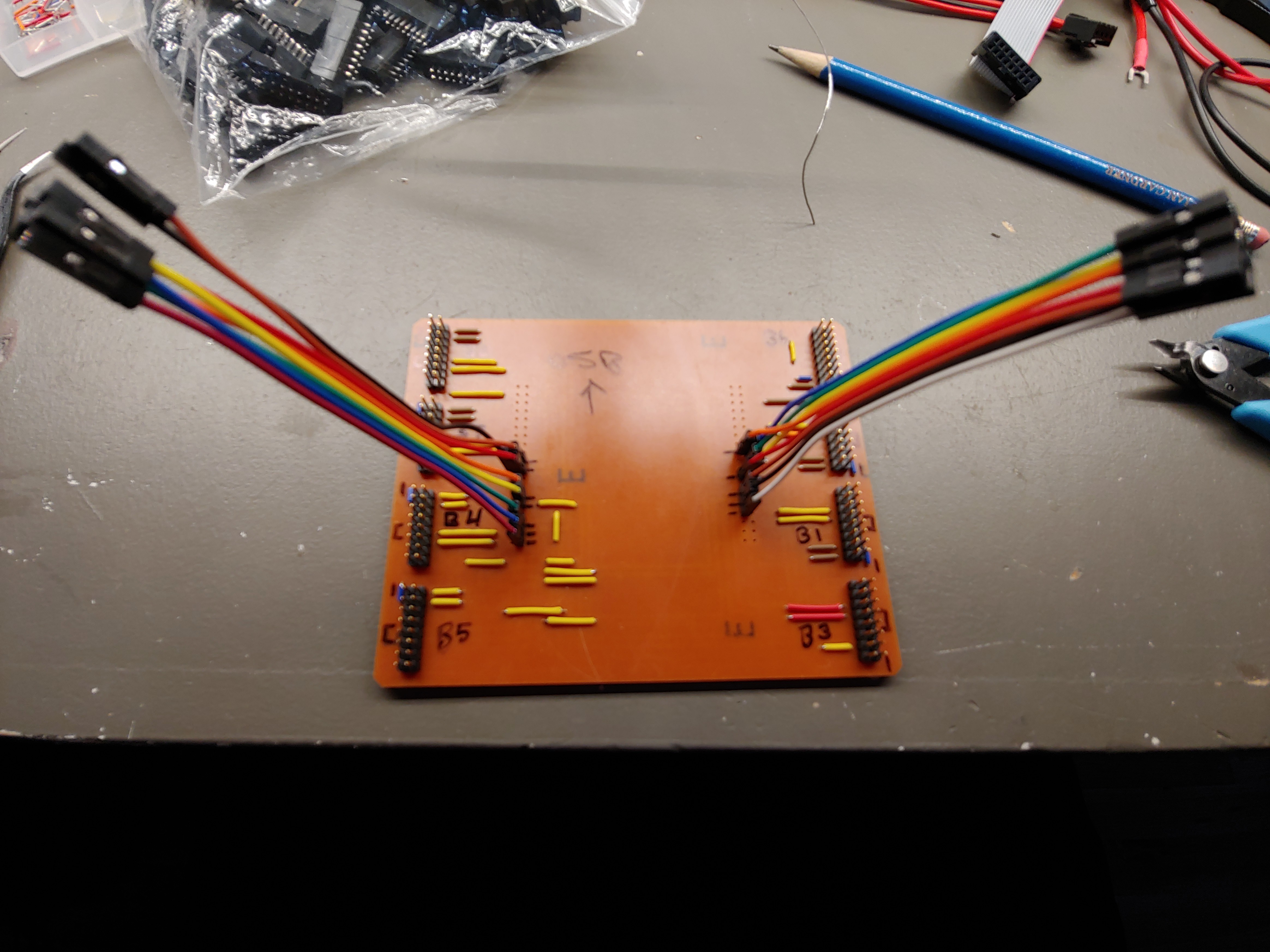
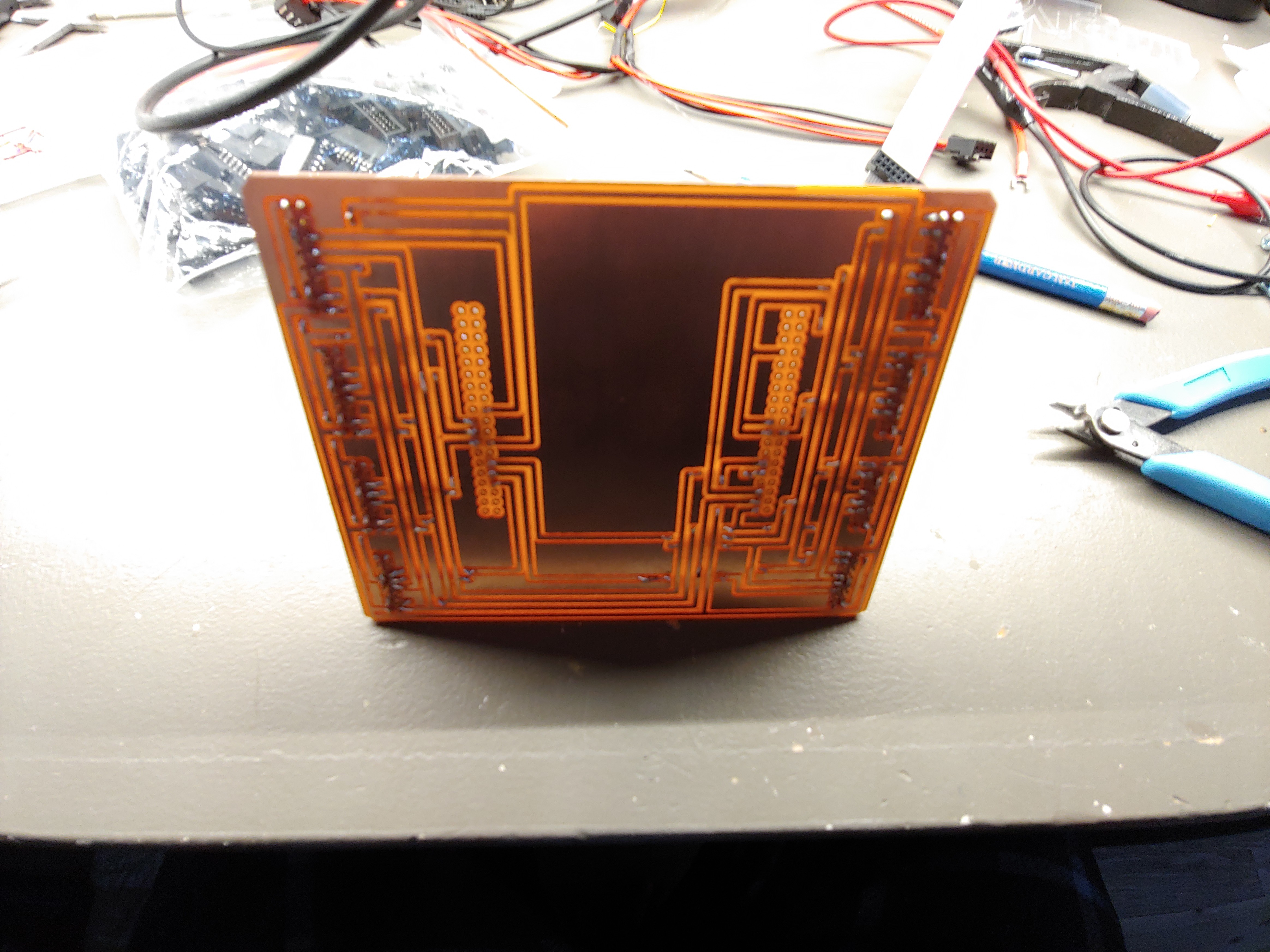
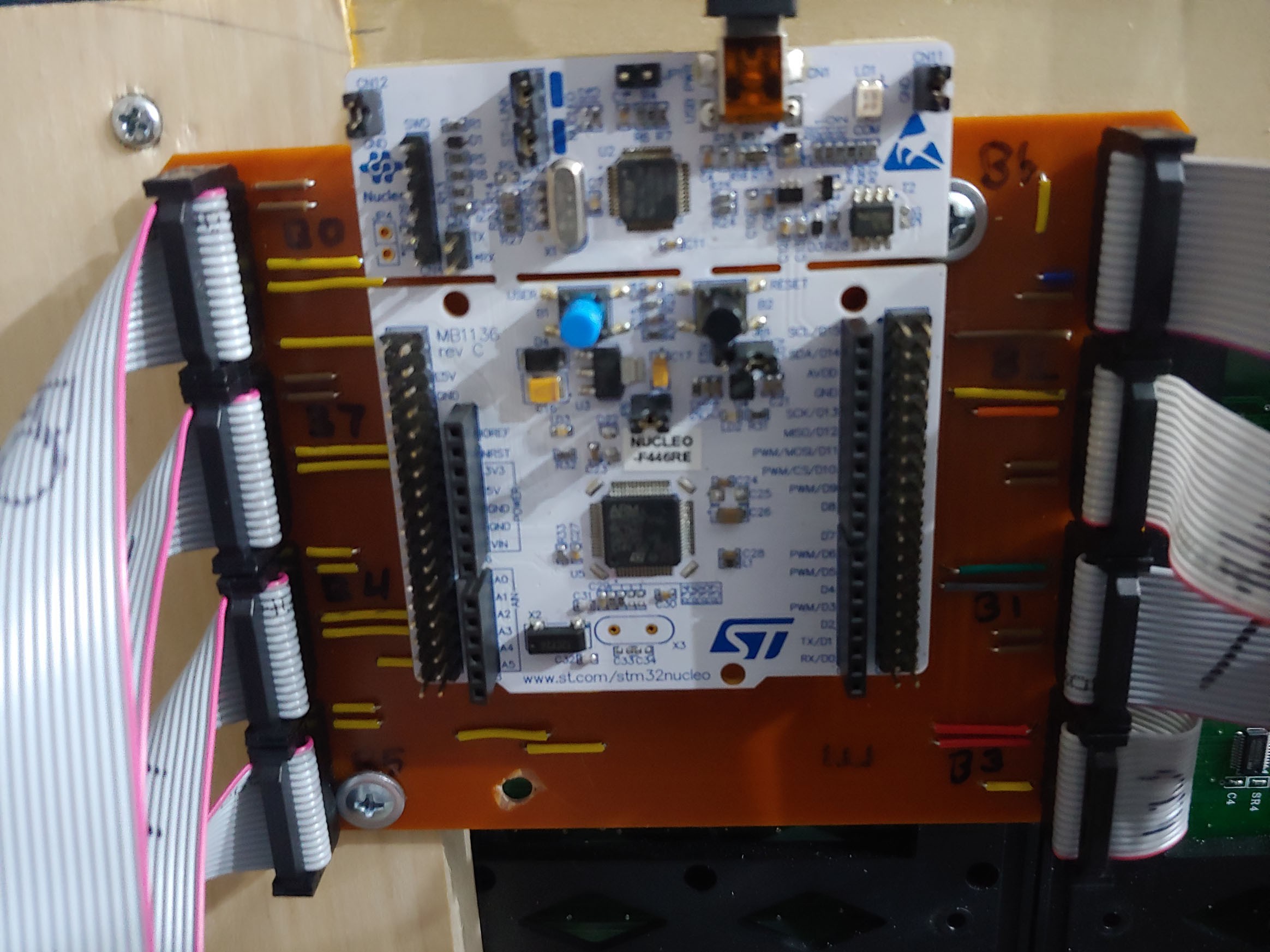
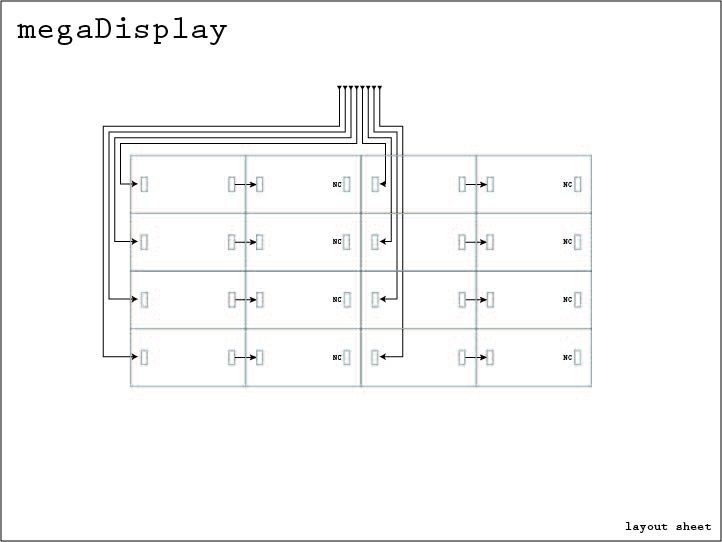
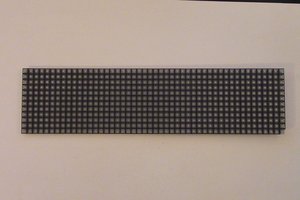
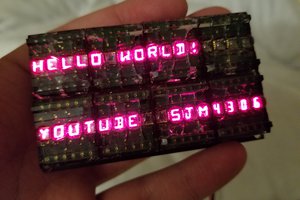
megaPanel: A Monochrome LED Matrix Display Panel
The megaPanel: (16) monochrome LED matrix panels, 8 bits, 120Hz
 George Gardner
George GardnerBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests




 sjm4306
sjm4306
 bornach
bornach
 furan
furan
Hi George Gardner, very nice work and informative project logs.
can you please share the code. i would like to learn pwm and grayscaling.