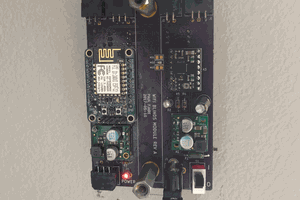
This is a quadcopter featherwing for feather ecosystem.
Main components:
1. BNO055, an orientation sensor which provides information about the orientation/attitude of the quadcopter when it is hovering in the sky. The communication protocol is I2C with address 0x28. The schematic for this sensor can be found on Adafruit website.
2. MPL3115A2, a pressure/altimeter sensor to provide altitude of the quadcopter. The communication protocol is I2C with address 0x60. The schematic for this sensor can be found on Adafruit website.
3. DRV8837C, the DC motor driver. There are 4 of them to drive 4 motors.
Power lines:
There 2 power supply lines to power up this featherwing, i.e. power for the ICs and power for the motors. Power for the ICs is taken from 3.3V pin and the power for motors is taken directly from the battery.
DC motor:
Six-mm hole is available on each four leg of the wing to attach a mini dc motor (motor diameter must be 6 mm). The dc motor will be press-fitted to this hole. If the PCB is thick enough, a small set screw can be used to hold the motor to the wing.


 Paul Fjare
Paul Fjare
 Dylan Miracle
Dylan Miracle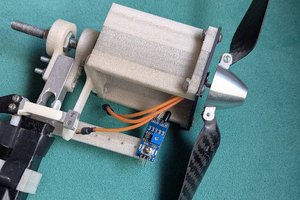
 JP Gleyzes
JP Gleyzes
definitely wanna see this fly, good luck!