 Adam Lange
Adam LangeToday I put together a modelica model in using the multibody physics library from the standard modelica library to see if this idea about solving inverse kinematics with modelica will work.
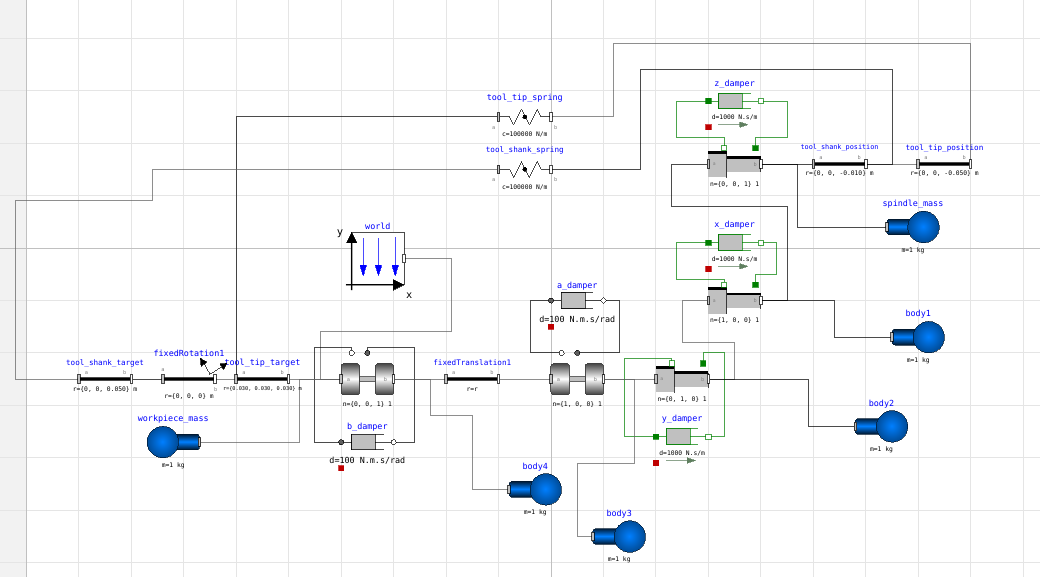
The joints in the model match my pocketnc 5 axis milling machine. There's a damper on each joint and mass on each part of the machine. Springs connect the imaginary tool target position to the actual tool position. When the model is run, the tool moves toward the target position and eventually settles there.
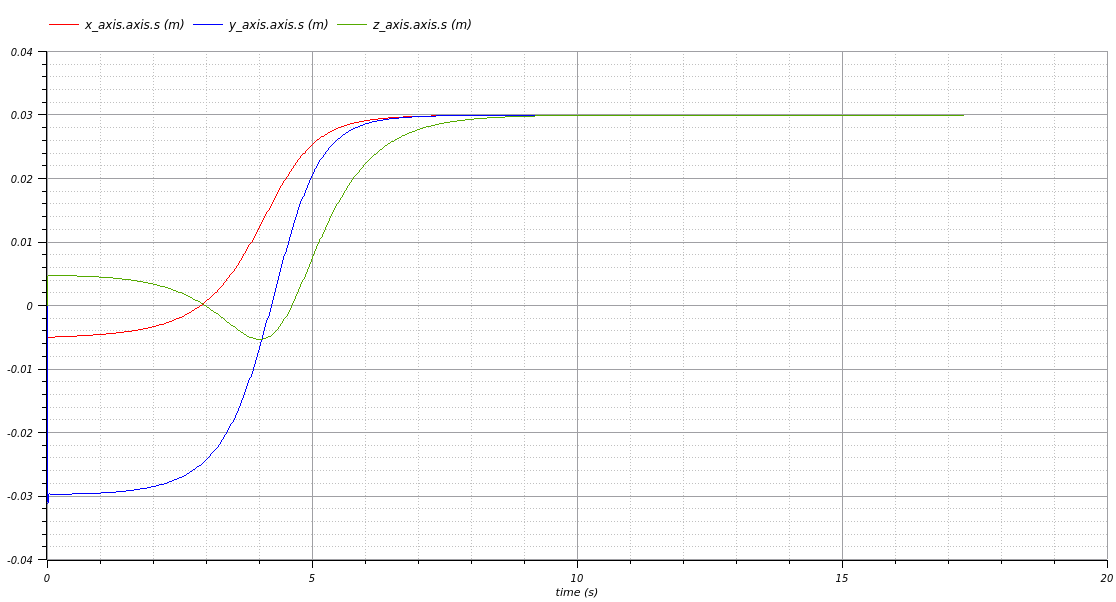
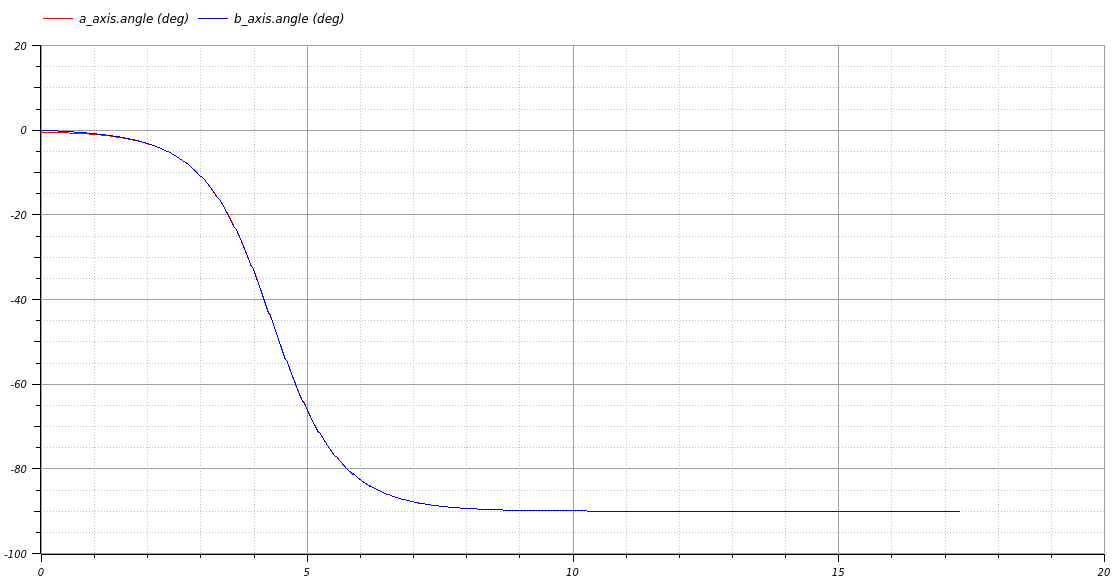
Success! I've solved the inverse kinematics problem!... But only for one tool position.
The next step will be to make some custom modelica blocks to feed the model with a series of end effector target positions and to extract the joint positions.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.