 Benjamin Prescher
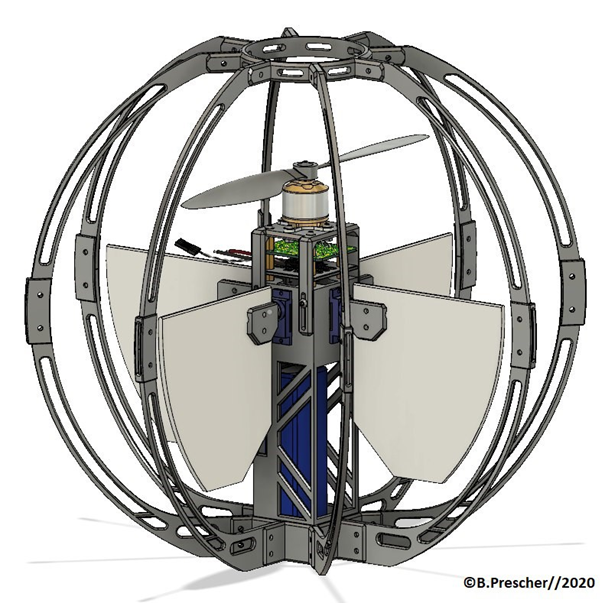
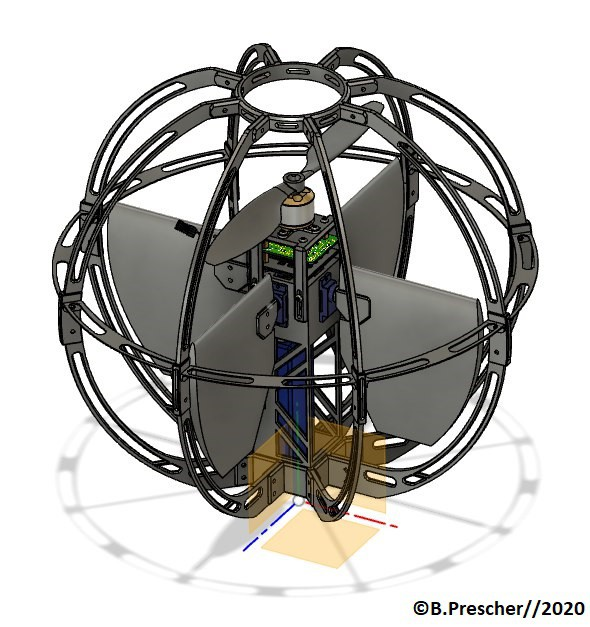
Benjamin PrescherThe idea behind the structure is to reach a low center of gravity with the battery underneath the rotor in order to not build an inverse pendulum. Furthermore, standardized components from the RC area had to be included in the planning (with the exception of the flight controller). The safety of the drone is an important aspect. Touching the rotor is made more difficult by a kind of ball-shaped cage, but the rotor can continue to rotate when the drone is pushed or flying against an obstacle. In an early state of design, plates were used to control the air flow.
In order to make the flow more efficient, a wing profile was modeled. Further bracing also took place.
Everything was designed in FUSION360 and 3D printed.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.