 Lars
LarsThe video in this log shows the first regular test of the autonomous driving unit during the suction process. For the test track I used some old boxes and crates as walls. Normally there are also free-standing objects in a room, but these were not considered in this test.
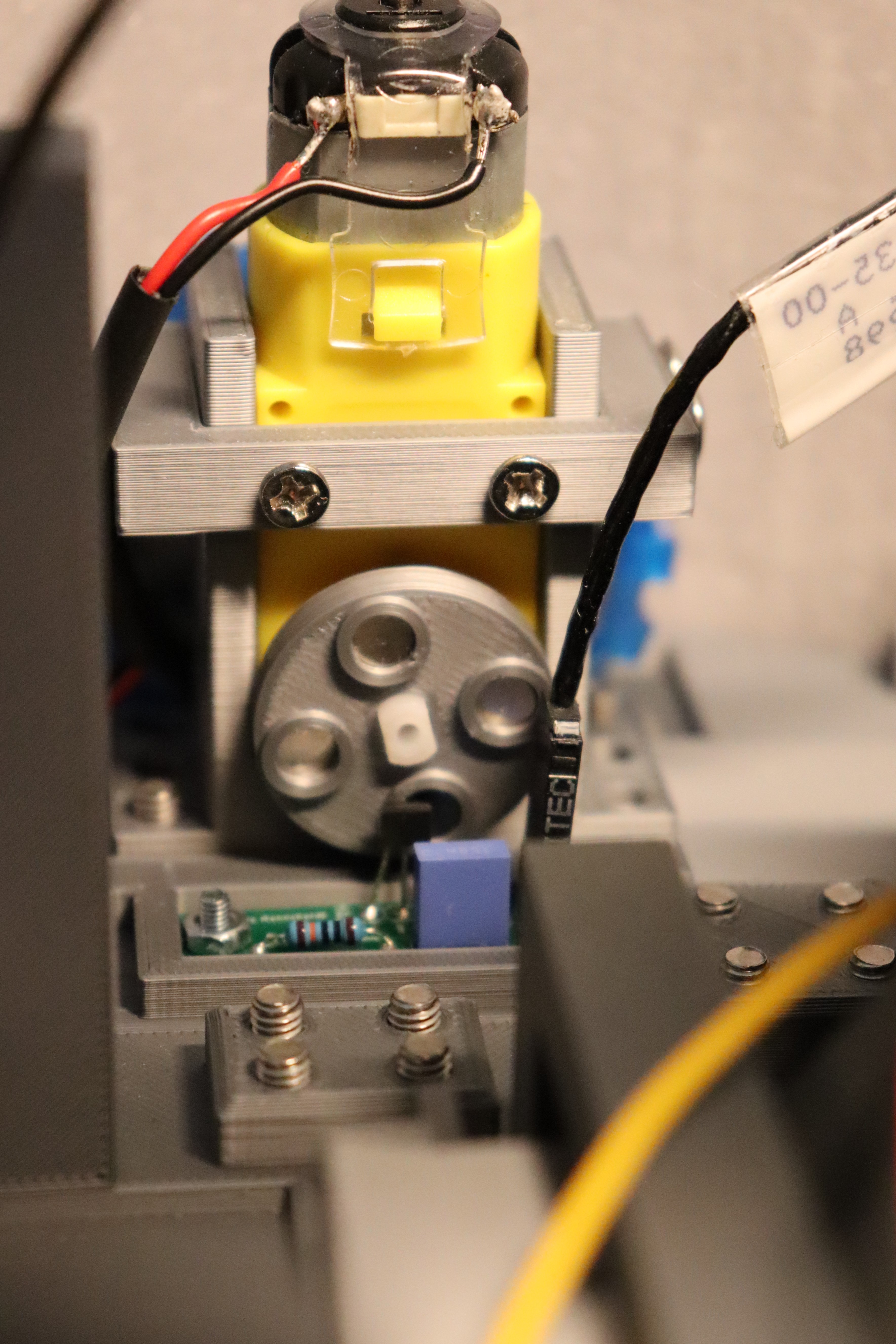
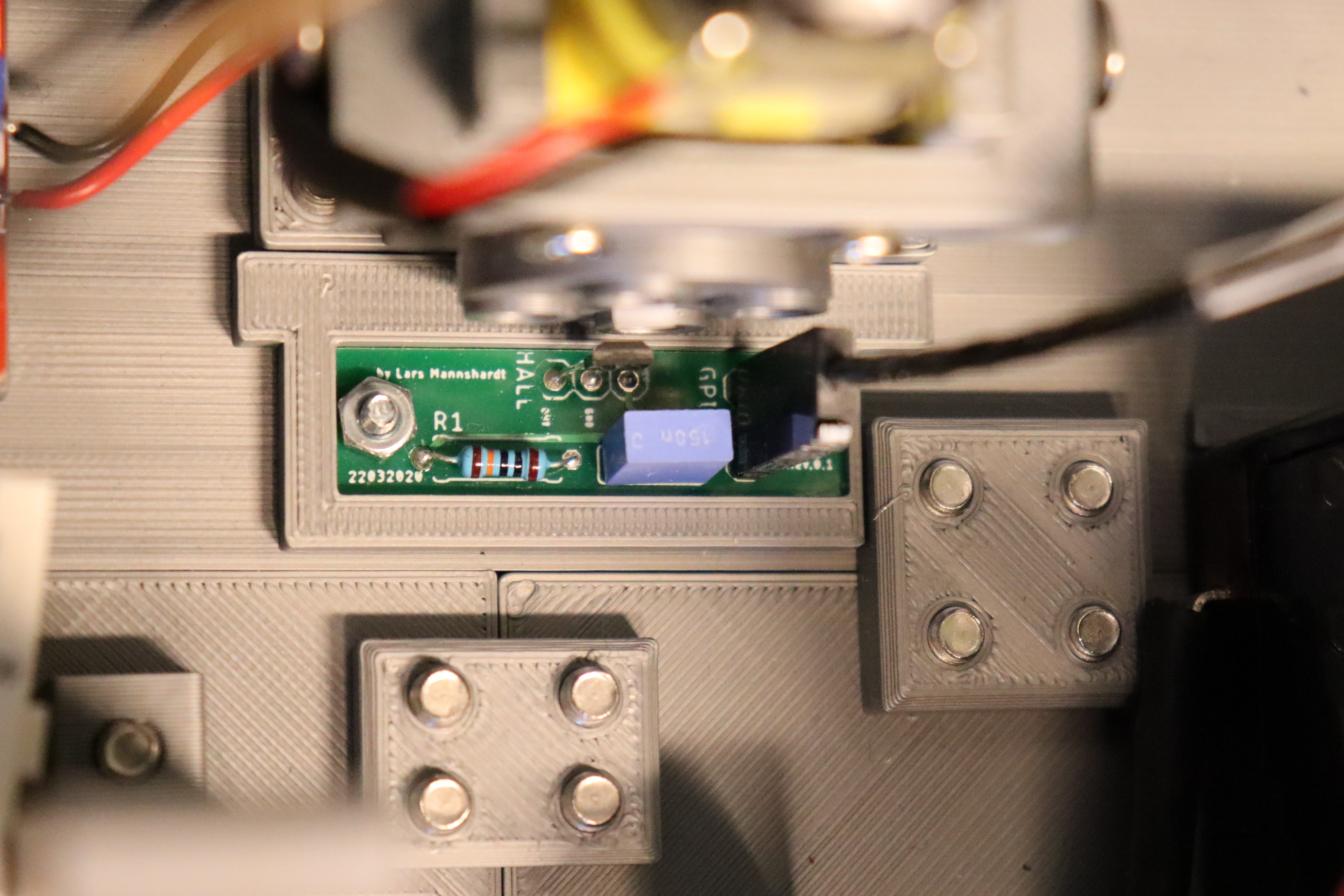
For obstacle detection, the vehicle uses only the two ultrasonic sensors mounted on the front. Because they can't see everything wheel encoder were attached to both wheels. They are based on four small neodymium magnets which are attached in a circle. A Hall sensor detects the magnetic fields and emits an electrical signal accordingly. The FPGA counts the wheel movements and can therefore determine how far the robot has turned.
Since only 2 ultrasonic sensors are used, I had to think of a way to detect the objects in the blind spot. If the robot collides with an object that is outside the range of the ultrasonic sensors, the robot stops. Due to the weight of the robot, the wheels are no longer able to turn. That’s why I have implemented a deadlock detection in the fpga.
The fpga stores the current and previous value of the hall sensors in flip flops. If both values remain the same, a counter is started. If the output of the counter exceeds a certain value and the values of the hall sensors have not changed, it can be assumed that the robot is not moving. Then the wheel condition is compared with the fsm for the motor control. If these two states are contradictory, the robot is stuck.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.