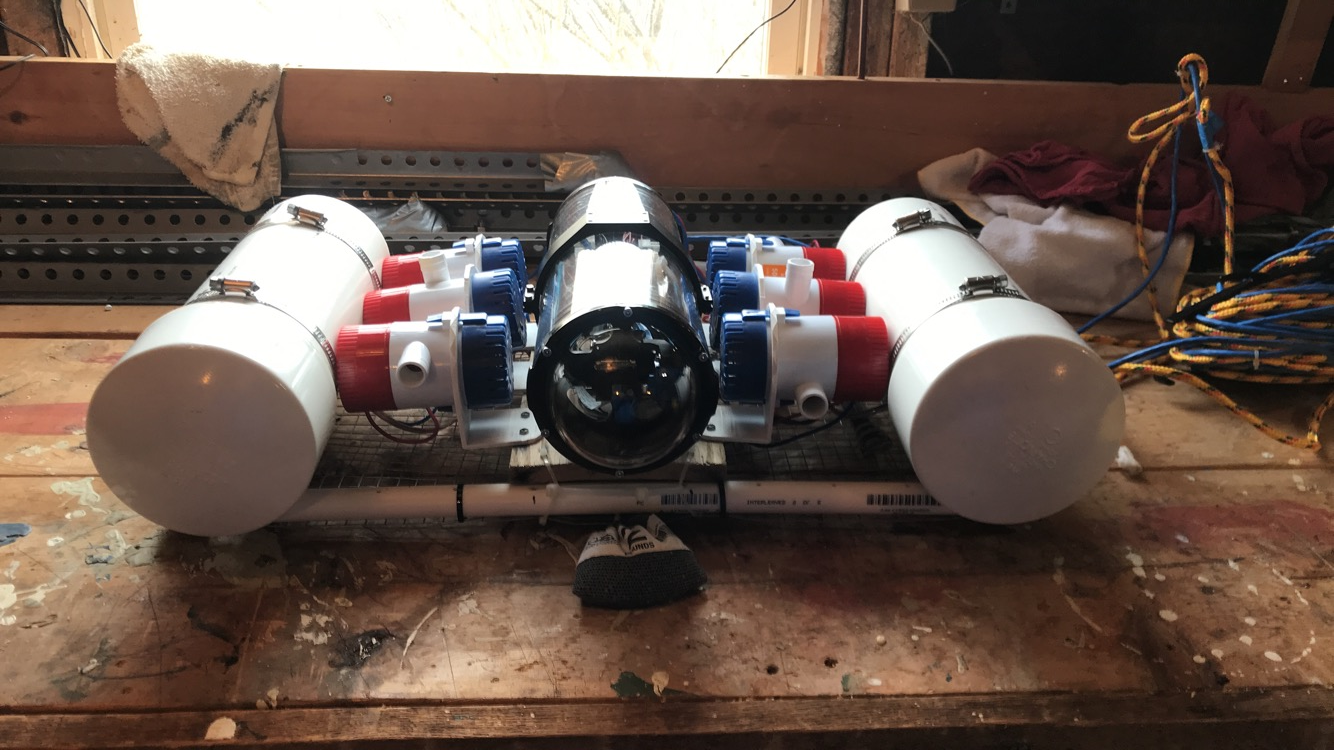
The successor to Version 0, Version 1 was supposed to be a much more capable vehicle and it came with a radically new design. Version 1 was supposed to be the first of what I called 'lander' type designs: everything would be mounted to a lower structure, which could theoretically double as a landing pad/foot if the vehicle were ever to settle on the seafloor.
Speaking of thrusters, you may notice the lack of up-thrusters. See, in my zeal for 3D-printed parts, I had designed a cool new compound thruster block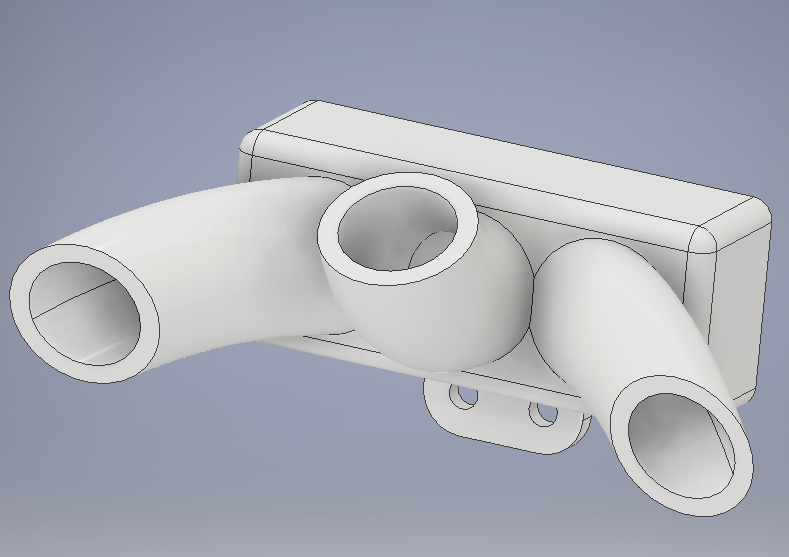
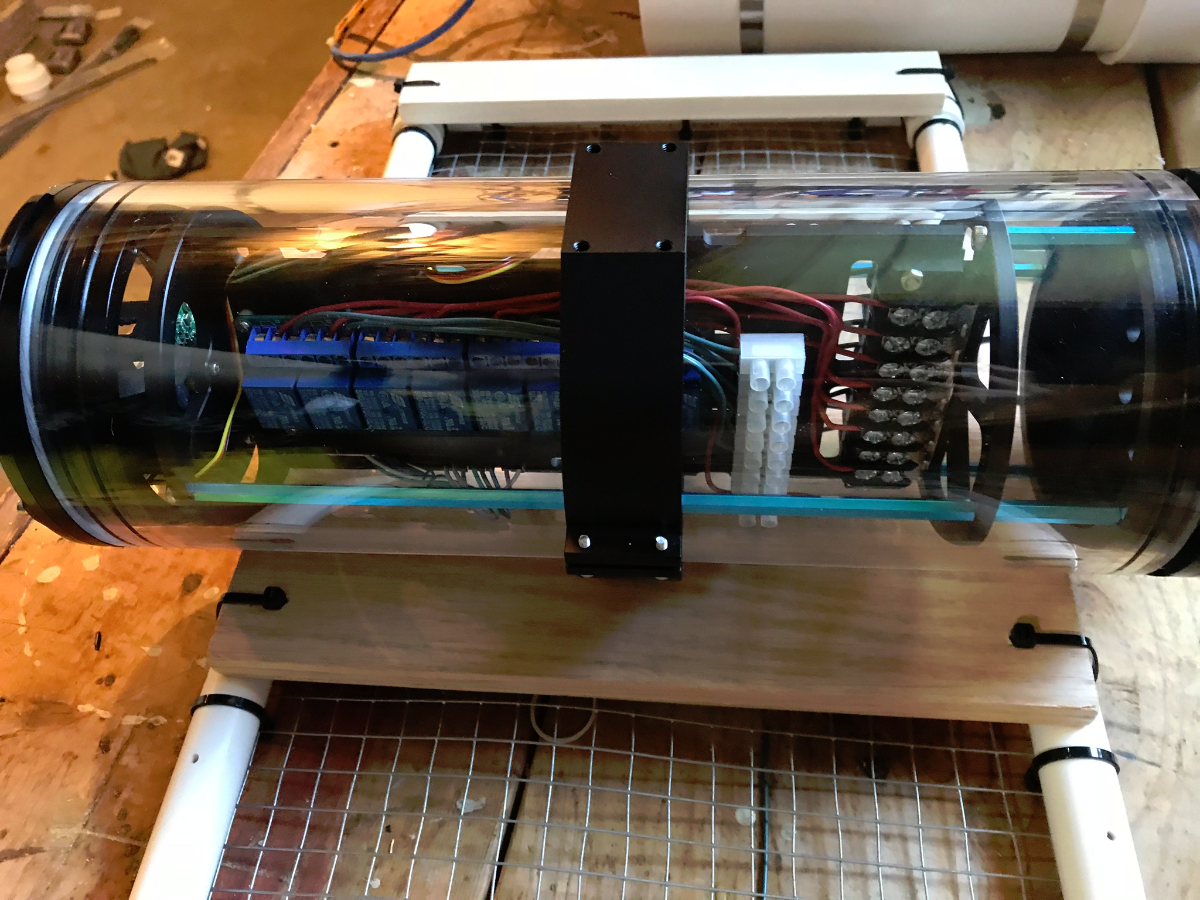
Aside from the thrusters and the new enclosure, a lot of stuff was the same. The outboard tubes still housed lantern batteries and the thrusters were still controlled by a Raspberry Pi. I made some software improvements to account for the new thruster design and the fact that my camera now had a pitch servo (yay!), but it was largely the same vehicle.
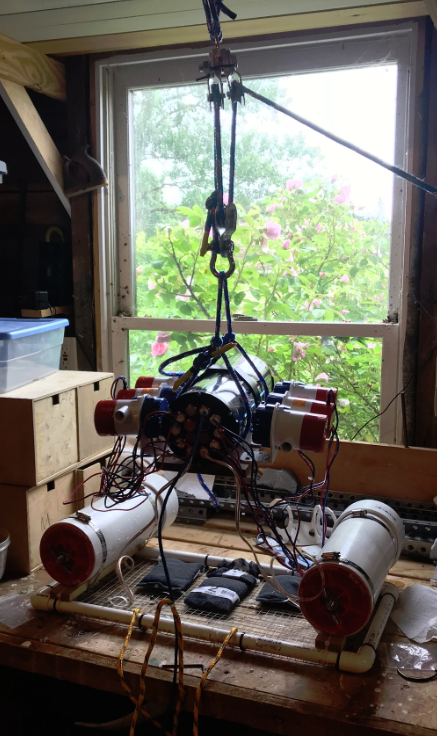
Version 1, unfortunately also didn't work. It worked better than Version 0 and made it as far as bathtub tests, but it wasn't able to stay afloat when taken out to open water (the quarry by my house). Turns out, the wood plank I used absorbed water (who would've guessed?!) and caused the vehicle to sink. All of my careful ballast adjustments had been for nought which was a shame, because the ballast was really hard to adjust on this vehicle. Version 1 also suffered from leak problems and trim problems, so it seemed that the battery tubes would be the main focus for the next vehicle.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.