 Shane Hooper
Shane HooperSolidCore CoreXY

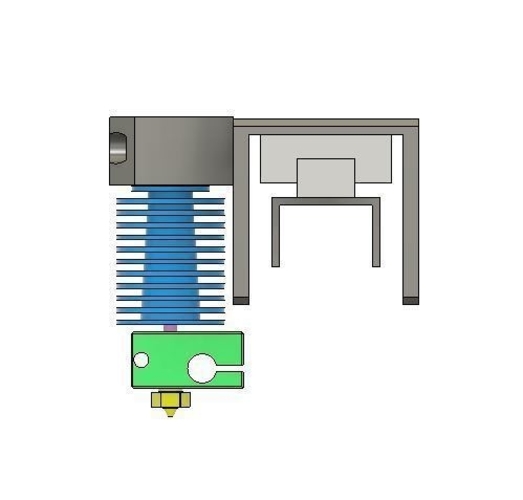
CAD Design In Fusion 360
All Metal Parts
Our long term goal is to is to build a modular platform, not just a printer. Think of it as an ecosystem of parts that can be arranged in different configurations and adapted for unique applications.
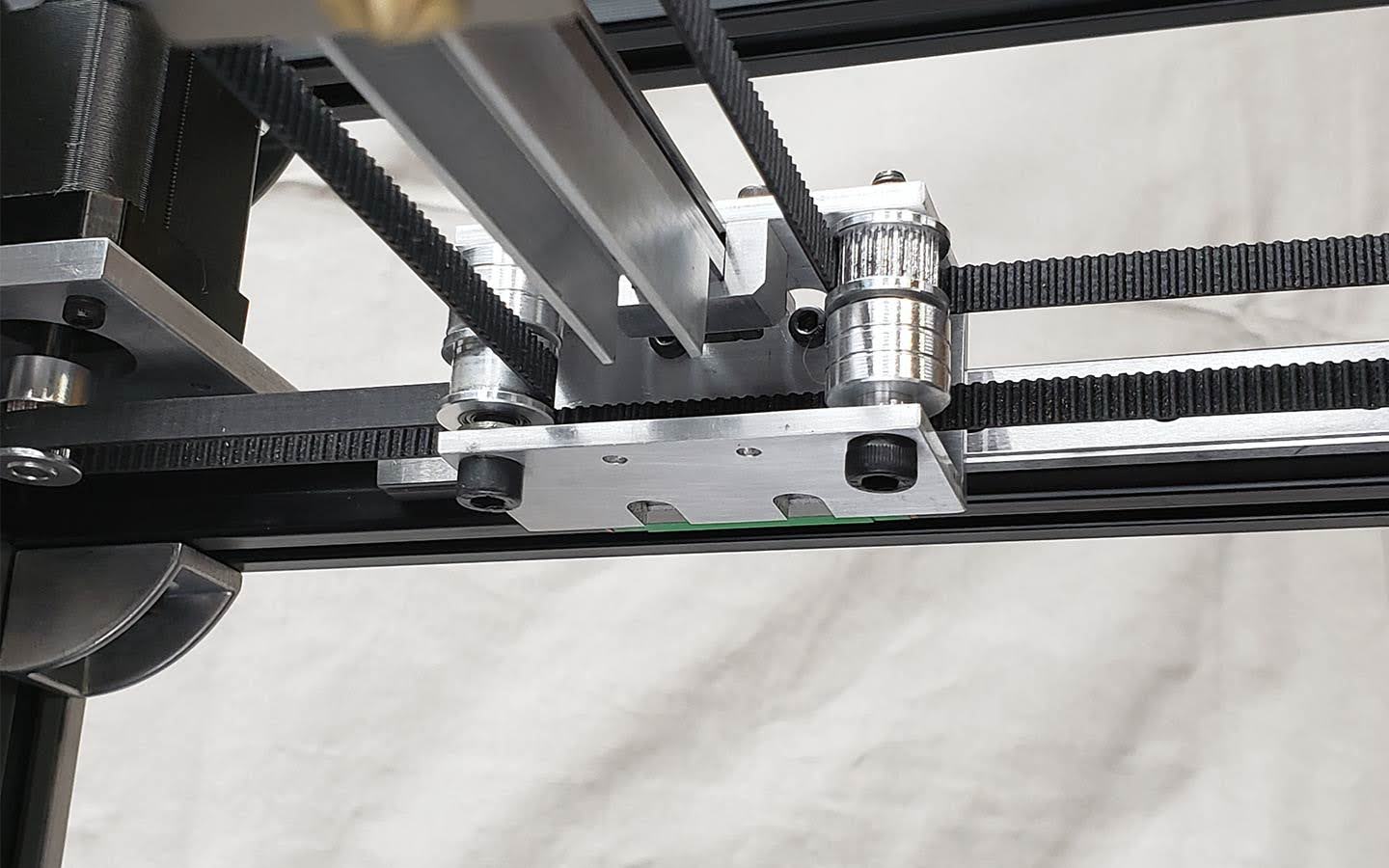
CoreXY Kinematics

The corexy parallel kinematics mean’s that the motors are the largest source of inertia within the system, are stationary. This means rapid acceleration because the two stepper motors provide a means of moving both axes independently or simultaneously. The major benefit of the design is that the motors remain in a static position.
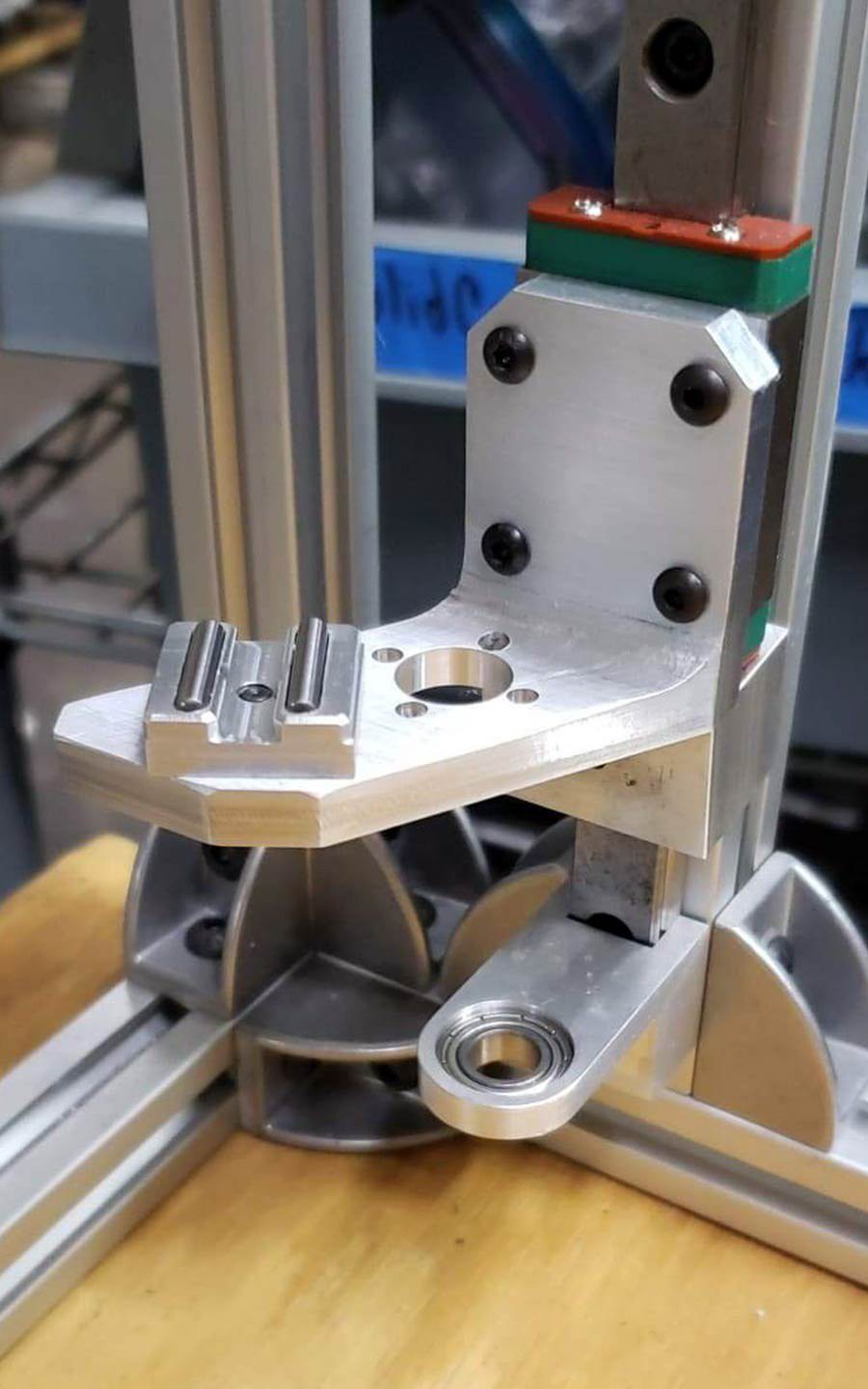
Z-Axis

Triple Z-Axis / Belted Z


We’re planning to use a 3 independent z-axis setup on the SolidCore 3D Printer. I’m not an engineer but I think that the belt and pulley ratio gives the steppers more torque and increases resolution. The belt to lead screw arrangement also minimizes and vibrations that might be transferred from the motors to the z-axis. Each lead screw will be constrained by an MGN12 linear rail. With the Duet Wifi we can drive 3 steppers and run an auto bed leveling routine using a proximity sensor or probe.
Single Z-Motor vs Triple Z-Motor

The typical core-xy 3d printer parts arrangement has a single NEMA 17 stepper motor with the belt routing to all two or three lead screws which move together in sync. Originally we were working on a design that used this single z-axis motor configuration. But after having trouble sourcing the belt that was the perfect length I decided to just go with three stepper motors similar to the HeVort printer or Jubilee tool changing core xy platform.
Duet 3 Mainboard H6C - RepRap Firmware

RepRap Firmware: Independent Z Motors
Many 3d printer users frown upon the idea of multiple steppers for independent z motors due to syncing issues. But with a good electronics setup like the 32 bit Duet board and the RepRap Firmware keeping the three lead screws in sync should be fie. When powered up stepper motors tend to jump to the four steps that match the phase current. Some will jump forwards or backward after a number of power cycles.
CoreXY Idler Mount












 AVR
AVR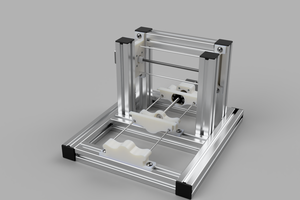
 Myles Eftos
Myles Eftos
 Philip Ian Haasnoot
Philip Ian Haasnoot
 Made In workshop
Made In workshop