 Anthrobotics
AnthroboticsSuccess! We managed to get bidirectional control with an off-the-shelf ESC!
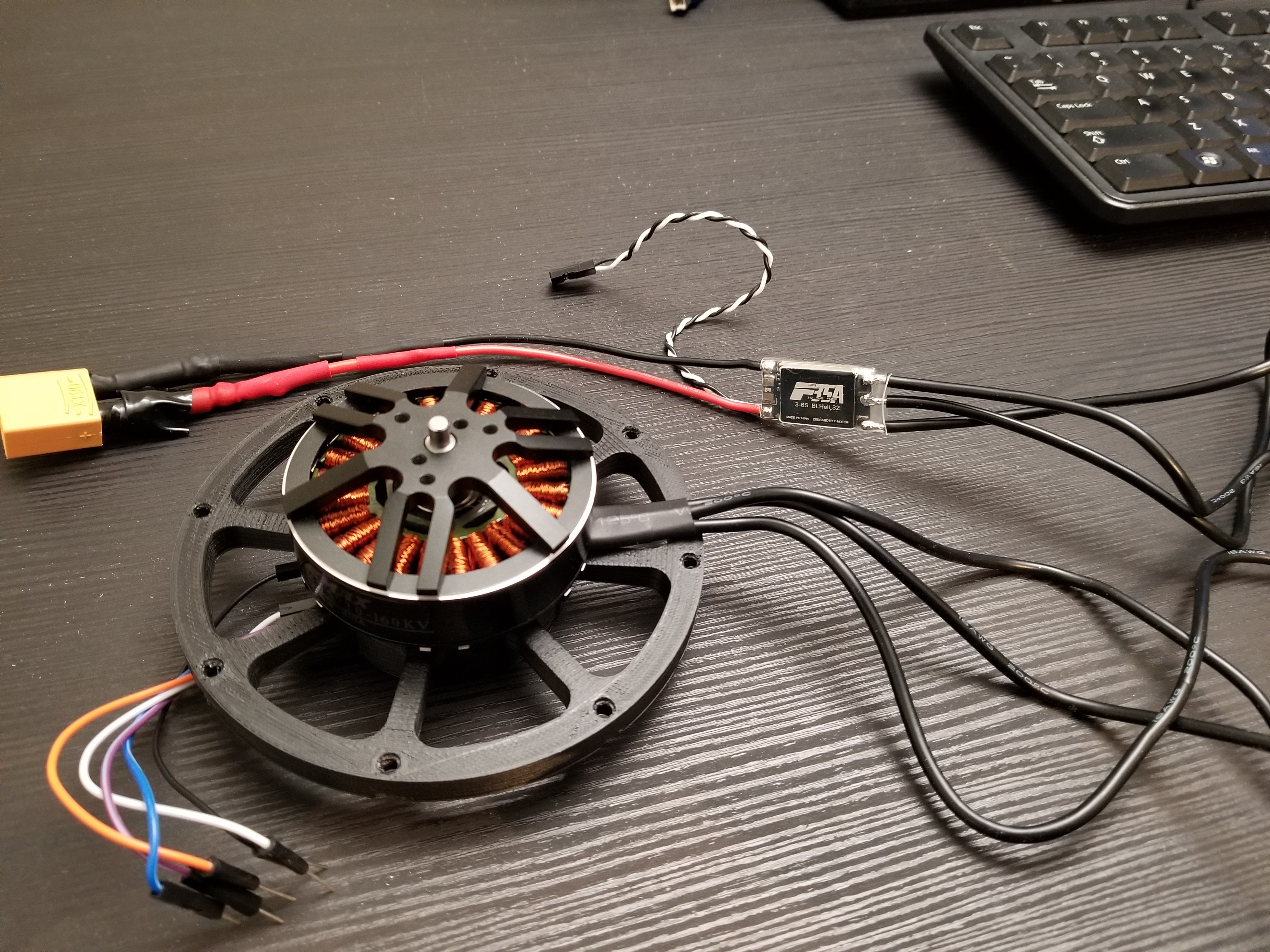
Unfortunately, the type of ESC had to be changed, as we encountered numerous issues flashing different firmware to a generic SimonK-type ESC. Instead we opted to go with a BLHeli_32 ESC. This comes with a number of advantages over the previous model, without incurring a massive price increase:
- 32-bit MCU,
- Easier firmware management, using a GUI;
- Built-in RPM, voltage and current monitoring;
- Sinusoidal control option;
- Higher continuous + peak current rating, and
- native bidirectional support
We are using a T-Motor F35A and F45A ESC to evaluate our BLDC controller design, as they are lightweight (~10 g) and compact (33 x 16 x 6 mm). The cost of each unit runs between $29 CAD and 43$ CAD, which is within our ideal price range, given their specifications. An ESC capable of delivering a higher continuous current will incur a higher cost, as expected. The current rating of an ESC selected for our actuator design will be based around the average current requirement for the intended task (current req. for drive systems for legs on a robot will be greater than that of the arms).
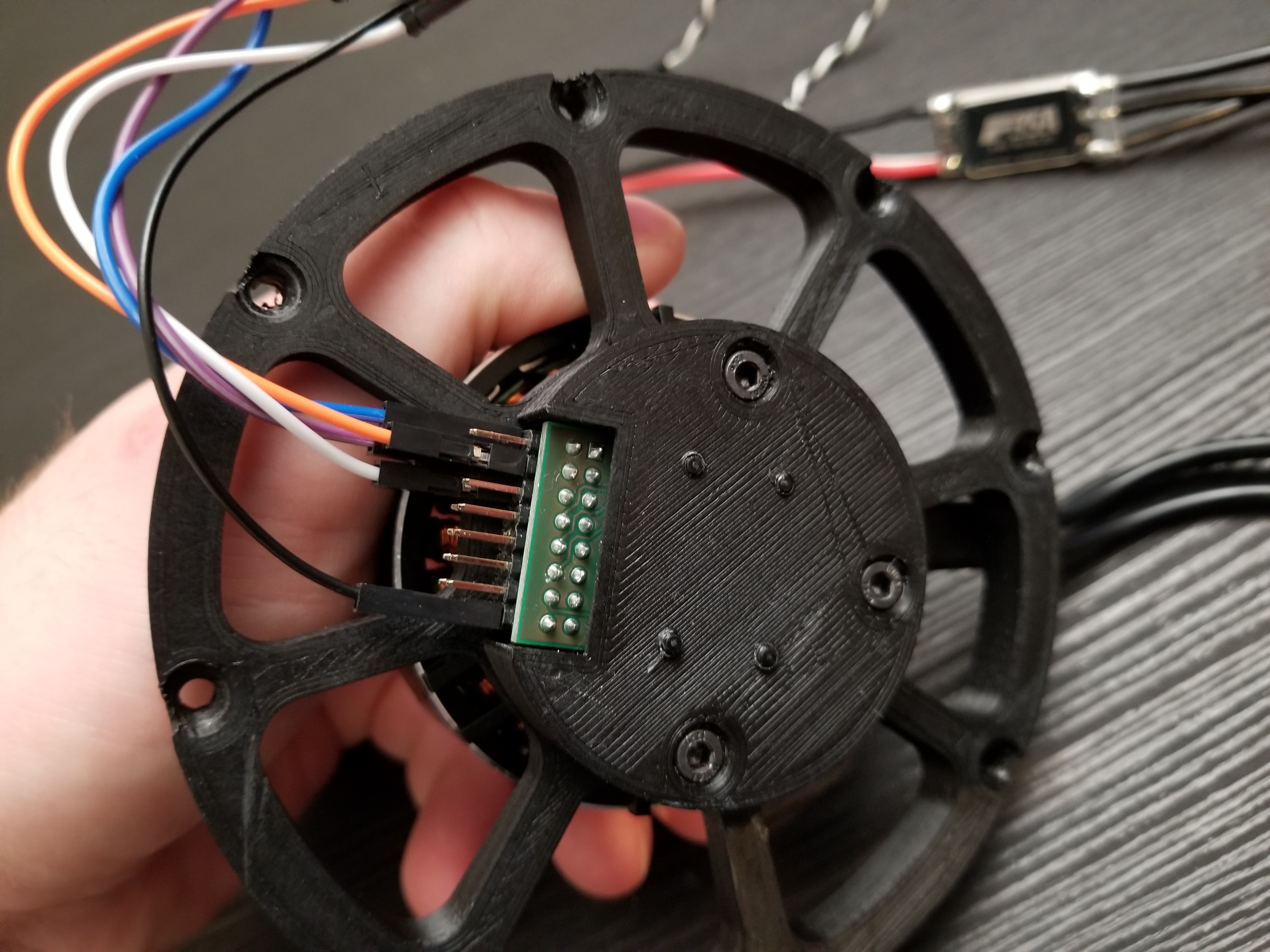
Next up is to experiment with position control of the BLDC motor (using the attached AS5047P Encoder), create a PID controller, and install the motor into an actuator housing. Load tests with a planetary gearbox will also be performed.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.