Val
Val-
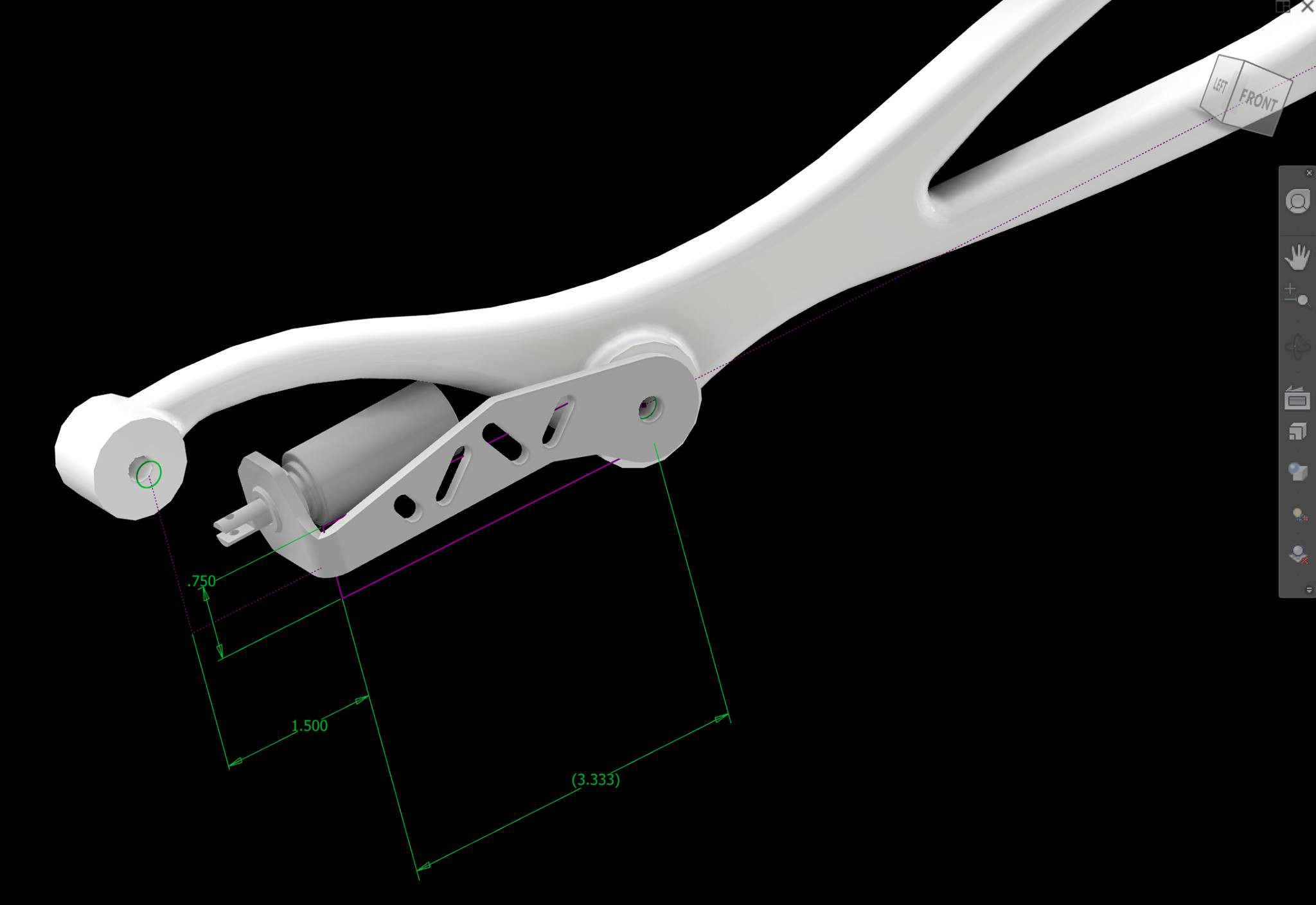
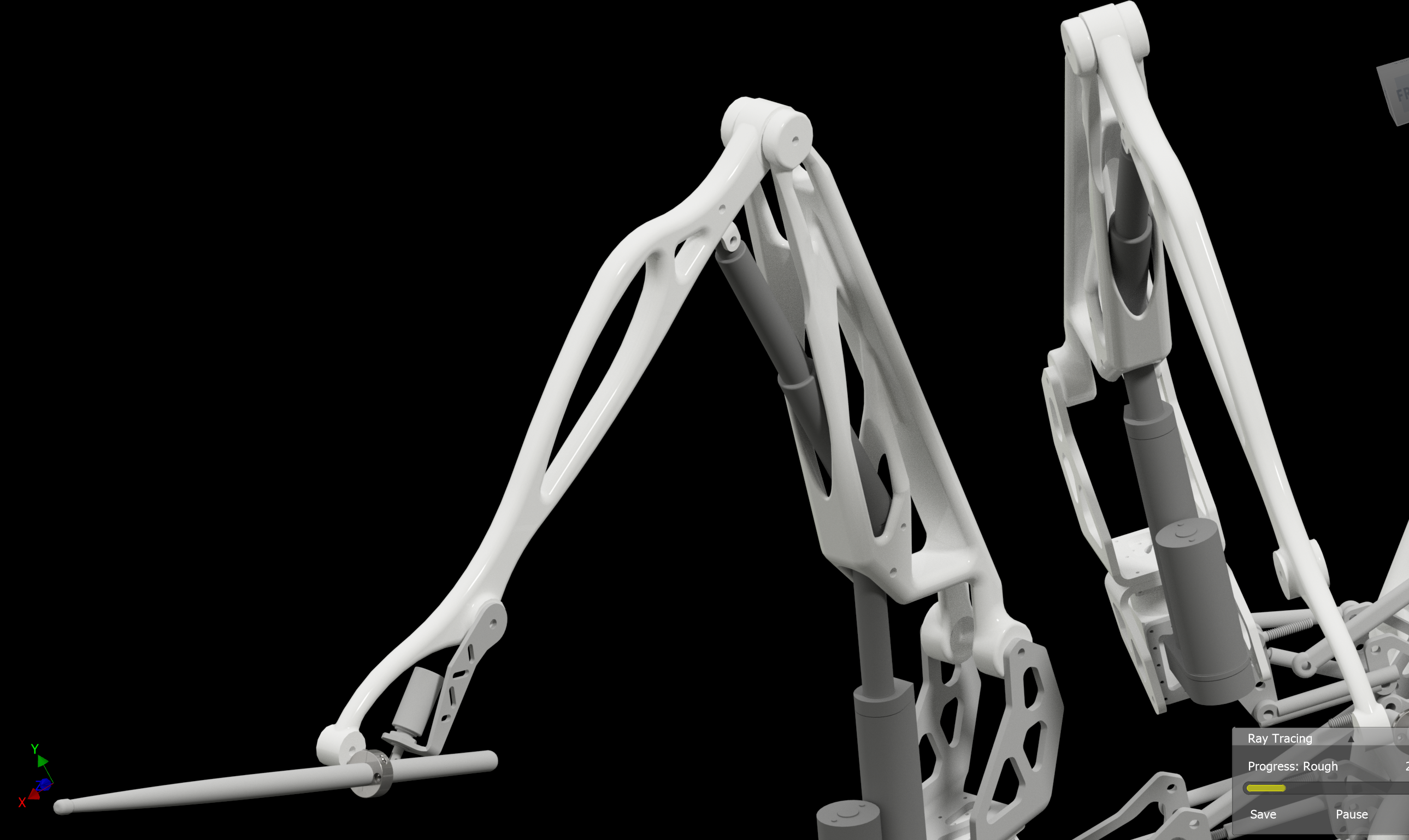
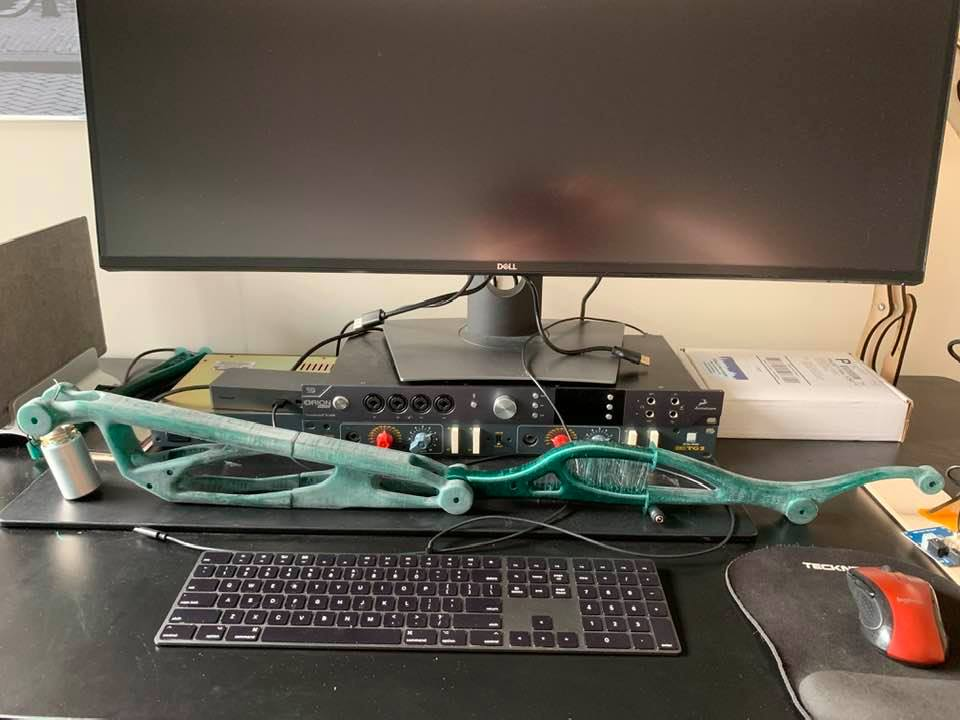
Solenoid Bracket Re-design
11/04/2020 at 22:18 • 0 commentsAlmost ready to test the full arm with the solenoid on the drums. Had to visit the hardware store a few times to try different solutions for mounting the drum stick and the solenoid, and re-design the mounting bracket.
![]()
![]()
-
Solenoids triggered by MOSFETs
10/23/2020 at 05:05 • 0 commentsThere is going to be a pull-type 12V solenoid at the end of each arm that will trigger the drum stick by pulling its end up, so it comes down and strikes the drum. The spring on the other end will pull the drum stick back up after a strike. I tried relays, but since the music is Drum and Bass, the High Hat will be getting a barrage of 16th notes at high tempos, so I went with MOSFETs. I got a few different solenoids, but this medium sized one from McMaster Carr seems to be a good fit for striking most drums. The heavier solenoids might work best for pedals.
-
Torso planetary gear drive working
10/21/2020 at 20:10 • 0 commentsMy next goal was learning to control the planetary gear drive with a ClearPath servo hooked up. I got it working this week - using the Velocity Command mode with PWM. The control pinout is Enable, Stop, Velocity, and Velocity Feedback. If you set Enable HIGH, Stop LOW, then PWM Velocity is < 50% duty cycle reverse and >= 50% duty cycle forward. You set the duty cycle constant by connecting that servo to USB and launching a Windows application that configures it. In this case I set 100 Hz as 100% duty cycle, so 50 Hz is half. On Raspberri Pi, I am using pigpio do send PWM with 255 passed for duty cycle to go forward max speed.
-
Linear actuators working with PWM
09/23/2020 at 17:04 • 0 commentsI am back to working on the electronics part of this project now that the weather forced me inside, and I got the two linear actuators in the arm working with PWM from Pi. I ended up using pigpio library to do this from C++.
-
Got slewing drive, finishing arm parts
08/19/2020 at 16:56 • 0 commentsThe slewing drive I ordered this spring to rotate the upper body finally arrived:
![]()
![]()
It weighs around 50-60 lbs, but it's all concentrated in that enclosure so it feels super heavy. That's a good thing because it needs to balance out the entire upper body without having the robot tip over.
I have all the metal casting supplies ordered, and working on finishing the 3D printed arm models to start casting them next month:
![]()
-
Getting Dynamixel Pro to work
06/26/2020 at 18:34 • 0 commentsThe basic test with Dynamixel Wizard on a Mac was successful, but I still can't get it to work in a Linux VM, or on the Pi.
-
Prototype Parts
06/18/2020 at 21:27 • 0 commentsI got laser cut parts to prototype one arm, now I just need to get screws to assemble all of this, hook up actuators and servo to their driver boards, and driver boards to Raspberri Pi.
![]()
![]()
-
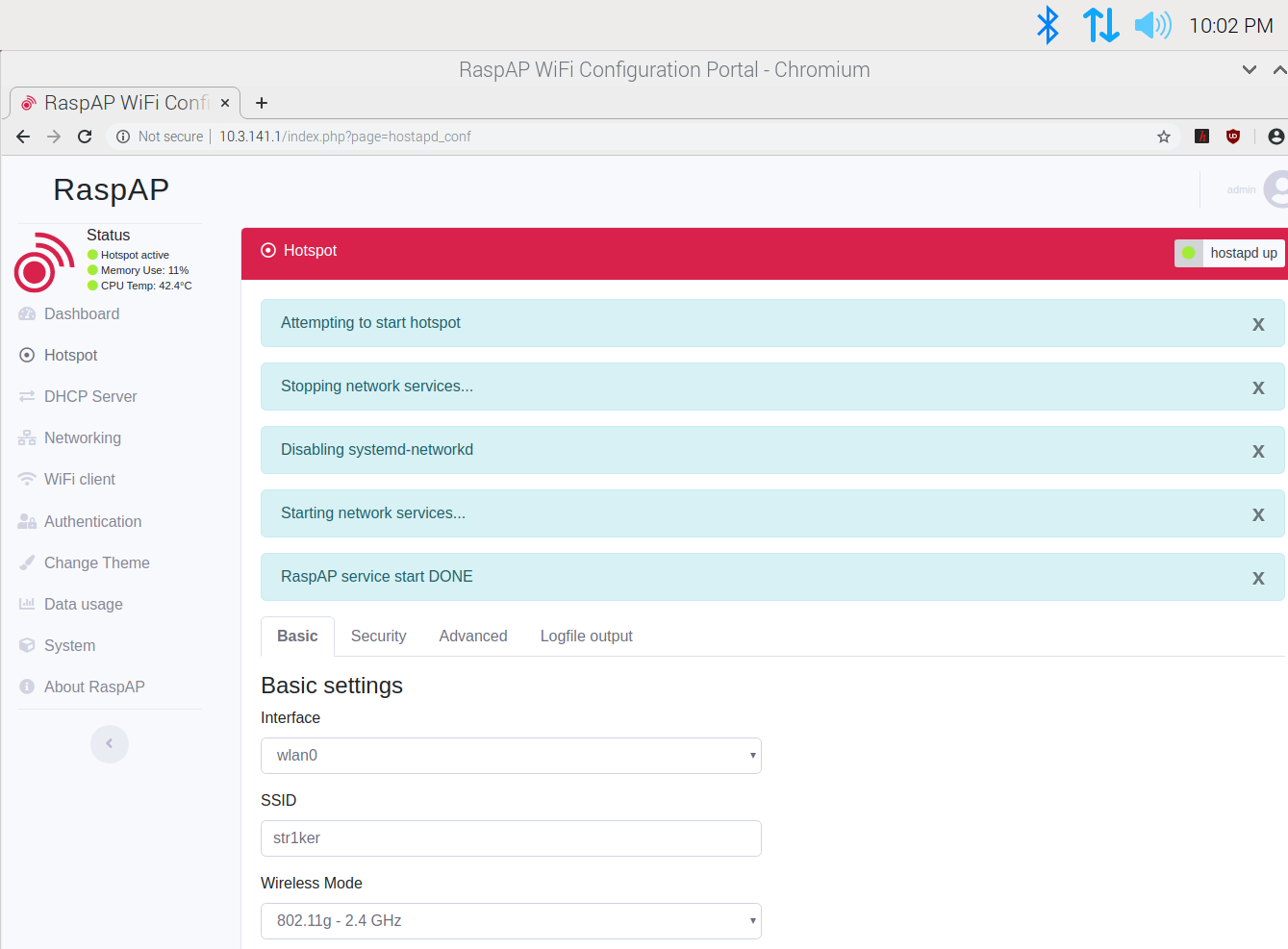
Robot Hot Spot
06/17/2020 at 05:15 • 0 commentsToday I finally completed the setup of the Raspberri Pi as a WiFi HotSpot. Now I can connect to the robot's WiFi network and control/monitor the robot operating system running on it.
Since I had to come up with a name for the hot spot, I am officially calling this robot "Str1ker".
![]()
I used the solution in: http://raspberry-valley.azurewebsites.net/RaspAp-Wifi-Hotspot/ to run the hotspot.
Unlike the countless console commands I tried before, the setup was really fast, actually worked, and give me a GUI interface for configuring the hotspot.
![]()
-
Dynamixel Servo
06/15/2020 at 18:28 • 0 commentsToday the Dynamixel Pro servo arrived - thanks Robotis!
I built ROS Melodic from source (there was no distribution for Raspbian on my PI4) but got stuck configuring it as a Wi-Fi access point so that I can connect to ROS master node running there. I'm sure that will be fixed early this week and I can proceed with hooking up servos. I also contacted someone I worked with before to make an arm prototype out of wood before ordering sheet metal parts or making investment casting molds.
![]()
![]()
-
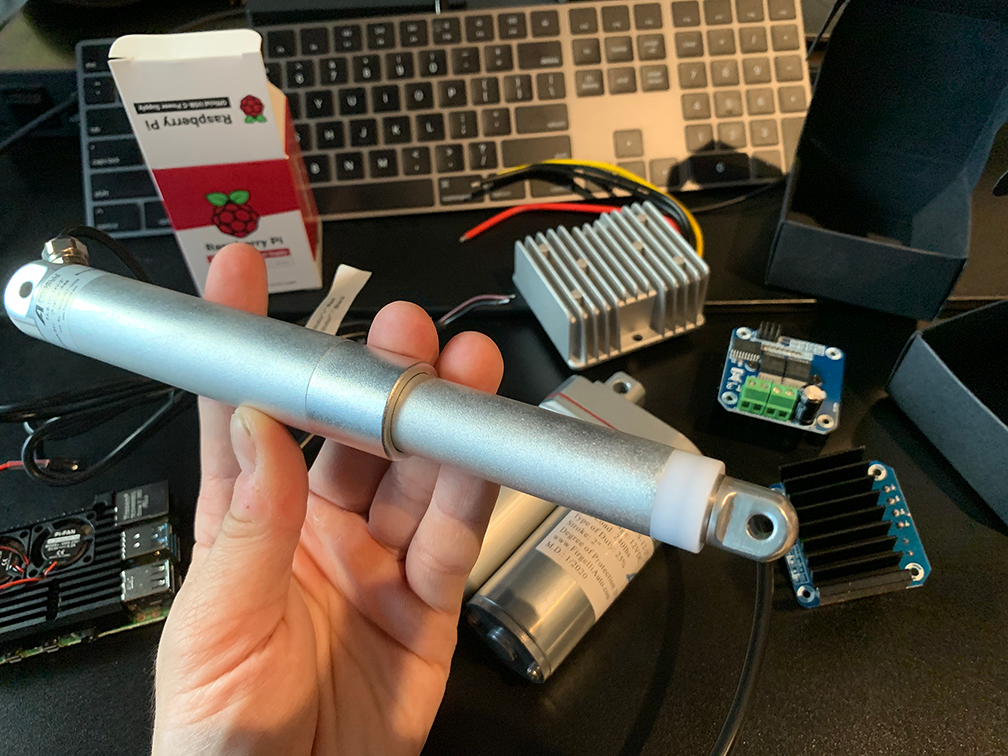
Actuators
06/12/2020 at 06:07 • 0 commentsI went pretty far with the CAD model without validating the design, so it's about time to build a prototype of one arm. Today my order of Raspberri Pi and the two linear actuators came in.
![]()
![]()
![]()