little french kev
little french kevA few weeks ago I created a game that learns how to play itself using reinforcement learning (more detail here :game that learn how to play itself).
Although this was a fun and great learning experience, the AI making the decision to control the gamepad was directly collecting data in game and never felt like a real player .
This is why I decided to come back with this project . This time I wanted to make a standalone robot that can play without any connection to the game or the computer running the game .
I also wanted to lean more a computer vision a more specifically about convolution neural networks .
A few months prior I put my hand on a Nvidia jetson nano so I decided to build my robot around that . It was a great fit as it can use a picamera and has GPIOs which makes control of servos easy .
I started with the design as I wanted to have a bit of fun building something a bit funky looking . I decided to base the design of this robot on one of my favourite video game character, GLaDOS from the portal franchise (What could go wrong here) . I tried imagining how GLaDOS could have been born if she was real .
I ended up with something like this :

isn't she cute ?

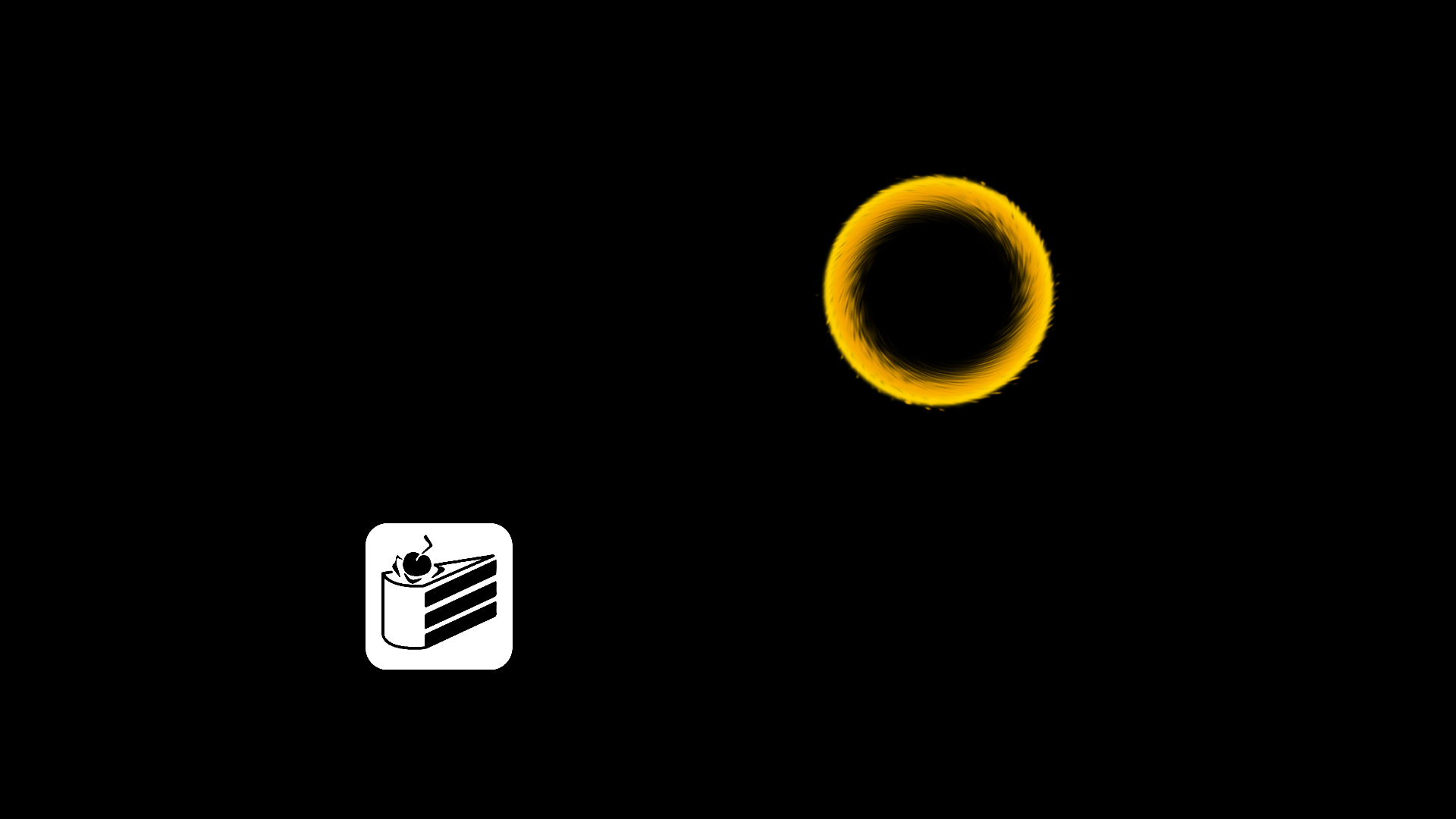
The next phase was to create a game . I needed something simple . The goal of the game is to place the portal over the cake . Of course as soon as she gets it the game reset . The cake is a lie you can never get it !!!
The following step was to create and train the neural network . neural network training requires data, a lot of it if possible . Here the data would basically be an image of the game and its associated joystick position . There are only 9 joystick positions in this case, left, left up, up, right up....... and centre .
Data can be very time consuming to collect this is why I decided to generate synthetic data . instead of taking photos of my screen with the game running I decided to render digital images of the game .
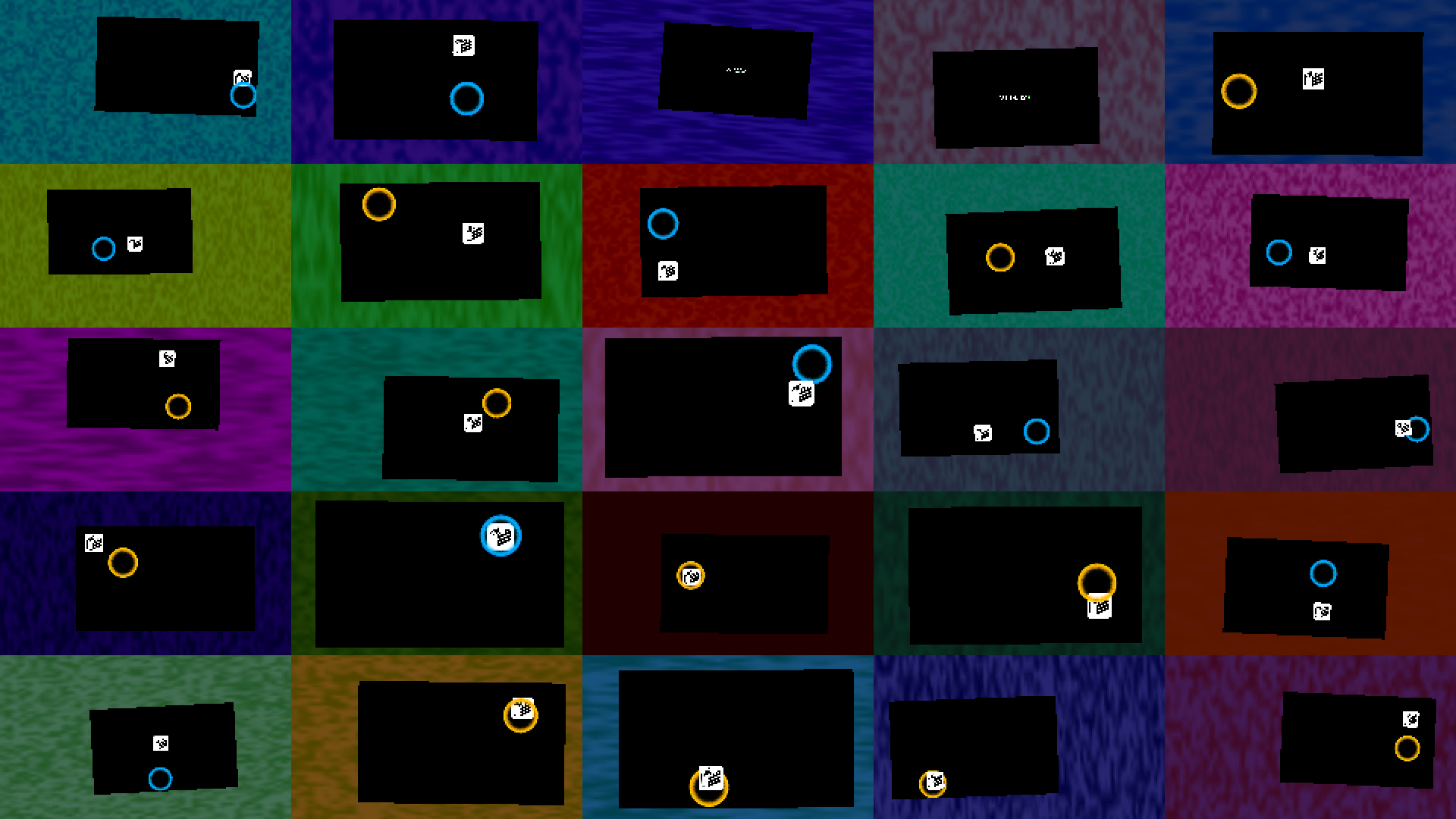
I used random noise in the background hoping that it would force the neural network to learn to ignore it and only focus on what is inside the screen . I also randomly moved the screen so the robot would learn how to play without being perfectly align with the TV .
Using this technique I was able to generate half a million of labelled images in only a few hours .
After a bit of messing around with the training parameters and architecture of the network it was able to predict what action to take with about 90% accuracy on the synthetic data .
Unfortunately the performance on real images are pretty poor .
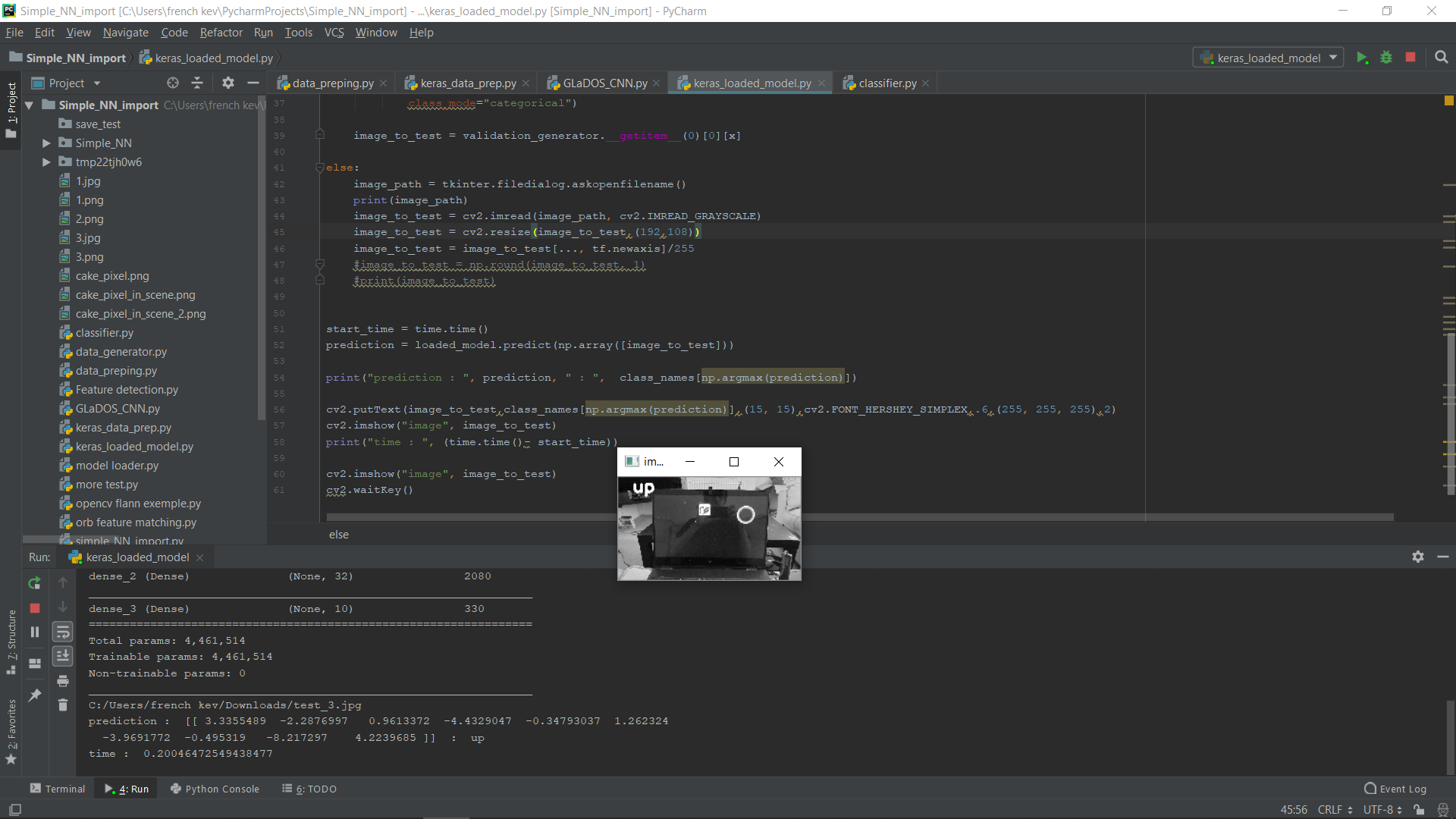
As you can see in the picture above the neural network predicts UP when it should pretty clearly be predicting LEFT or LEFT UP . I think this is due to my synthetic data being too simplistic with no reflection on the screen an a background way too uniform .
I then decided to collect data directly from the Pi camera mounted on the jetson Nano . For this I setup the Jetson Nano as a server and the PC running the game as a client . Once the game is started it connect to the server, the server then start taking picture and ask the game to change frame after each picture taken .


After inspecting the new data I realized that it could do with a bit of cleaning . Some images were taken between to frame and can have multiple target displayed which make them impossible to classify (even for a human) . Being a bit lazy I decided to retrain the neural network without doing any data cleaning . It still managed to reach 75% accuracy . Not great but I believe that the 'uncleaned' data is probably the cause .
I was curious to see how it would perform on the nano so I loaded the model and starting feeding it the video feed from the camera . It didn't disappoint as it ran at around 25FPS!
The other task I had to tackle was to control the arm actuating the gamepad joystick . I assumed I could just control the servos directly from the GPIO's of the jetson Nano . Unfortunately it was not the case . I decided that reusing...
Read more »