Andrei Gramakov
Andrei Gramakov-
New ESP32-based platform testing: Updates!
07/11/2020 at 13:12 • 0 commentsWorks:
- GY-91 through I2C: gyroscope + accelerometer
- Serial for external control
- I2C slave for external control
- Wireless connection - Bluetooth serial port
- Motors control
- PWM for motors - three speeds
- RPM counts. (BTW the motors have different speed as it turned out 😕)
To-do:
- Position data handling - calibration, filtering, conversion in angles (?)
- Code refactoring and configuration with menuconfig
Work in progress here: Feature/esp32 by an-dr · Pull Request #1 · an-dr/zakhar_platform
-
New ESP32-based platform testing
07/10/2020 at 18:03 • 0 commentsWorks:
- GY-91 through I2C: gyroscope + accelerometer
- Serial for external control
- I2C slave for external control
- Motors control
To-do:
- Wireless connection
- Position data handling - calibration, filtering, conversion in angles (?)
- PWM for motors GPIO
- RPM counts
Work in progress here: Feature/esp32 by an-dr · Pull Request #1 · an-dr/zakhar_platform
-
Zakhar disassembled
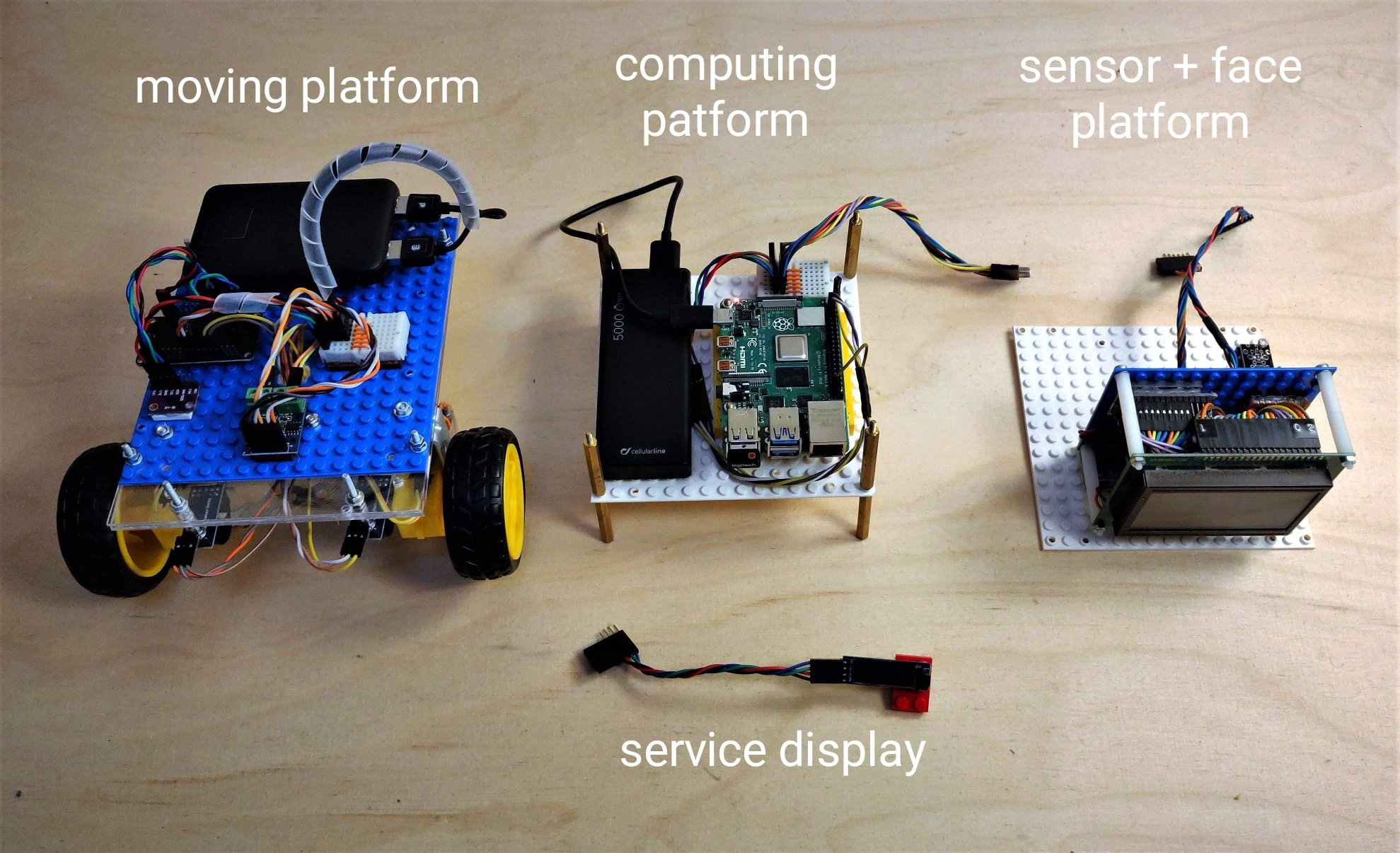
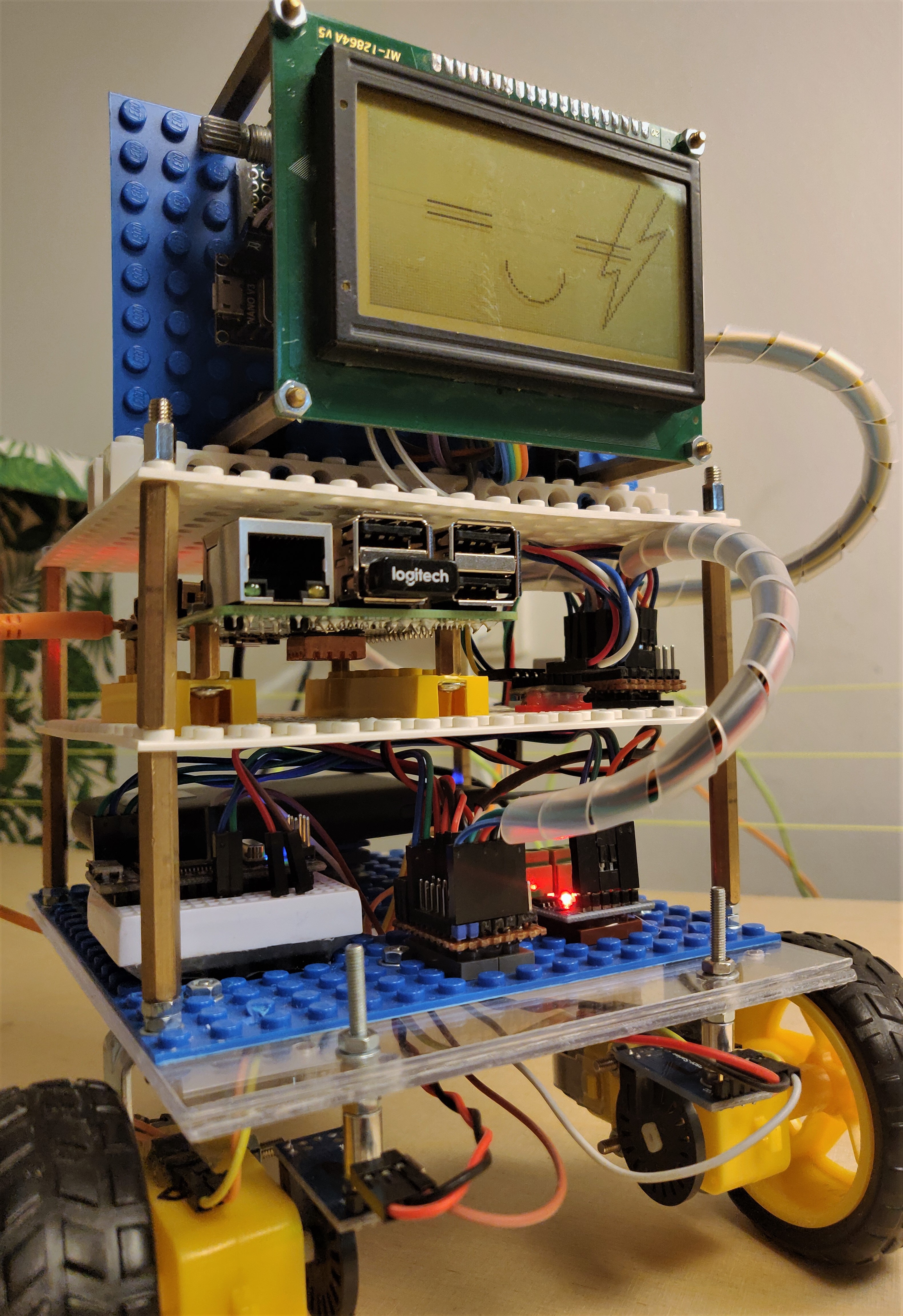
07/06/2020 at 21:04 • 0 commentsWhile the robot is changing all the time, after the last update I've decided to take some snapshot of its current state and show to the public what's going on now. Let's start:
![]()
Zakhar consists of three (sometimes four) platforms and a service OLED display. I'm using the last one for debugging, testing, etc.
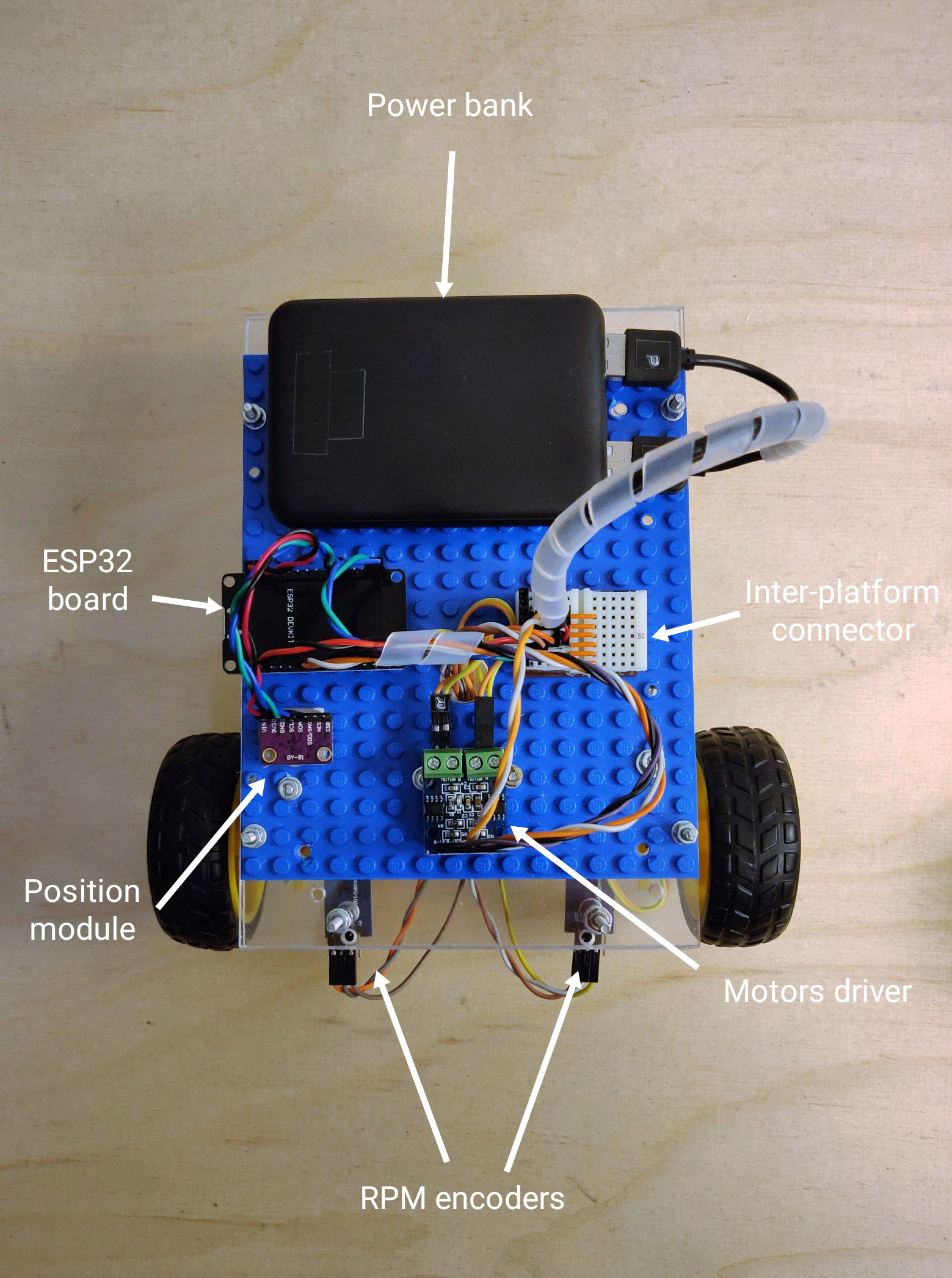
---------- more ----------Moving platform
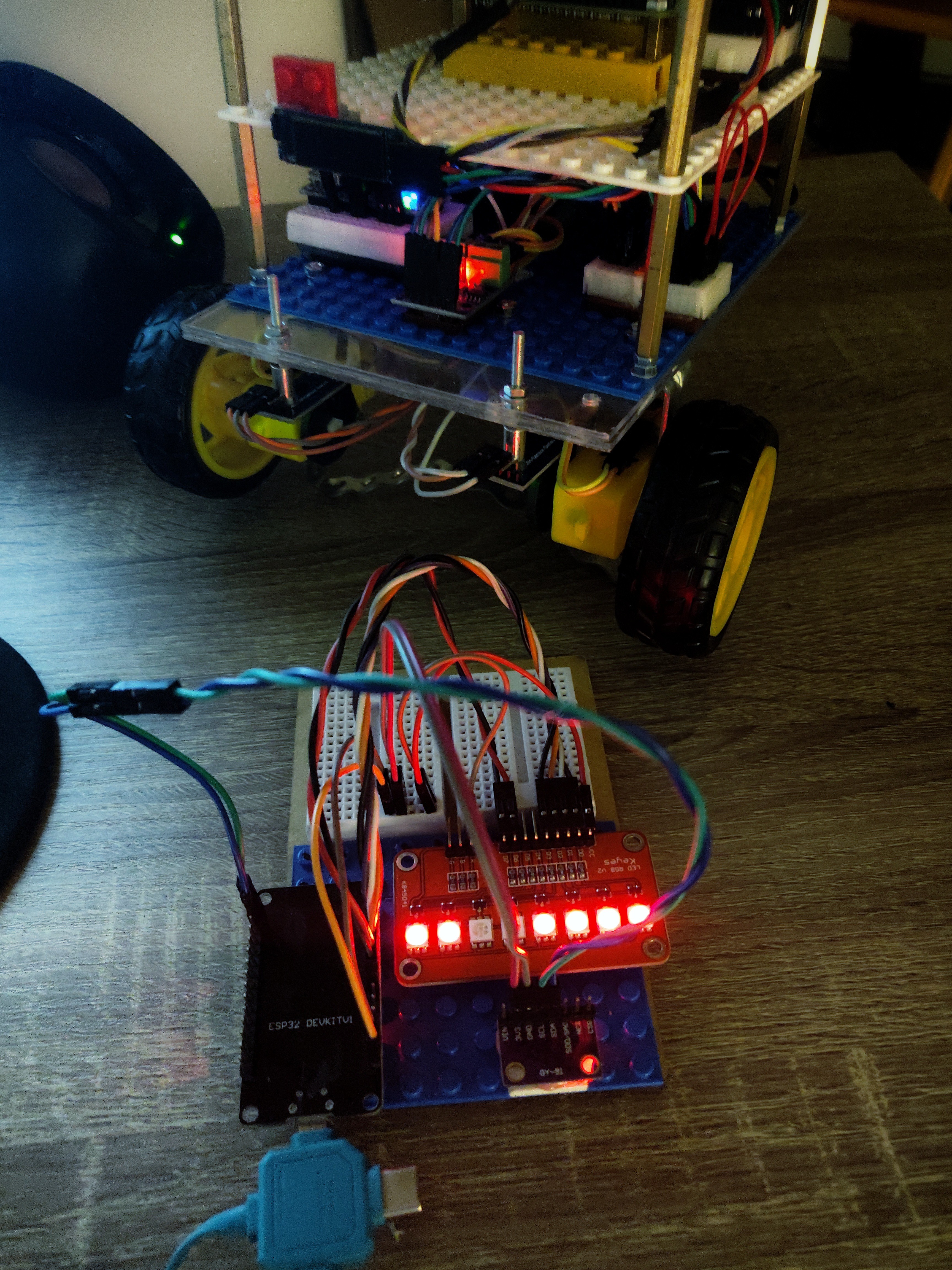
The moving platform just got the update with ESP32-board as a replacement for old Arduino and with the MPU module
![]()
I did it for the sake of better multitasking which is needed to me for simpler handling of data from sensors and commands from the computing platform.
The platform is carrying on a power bank which supplies motors of the platform and all other electronics of Zakhar (except Raspberry Pi).
The power, as well as commands, are transmitting through unified 8-pin connectors (2 pins for I2C, 2 pins for 5v of low current, 2 pins for 5v of high current, 2 pins - reserved)
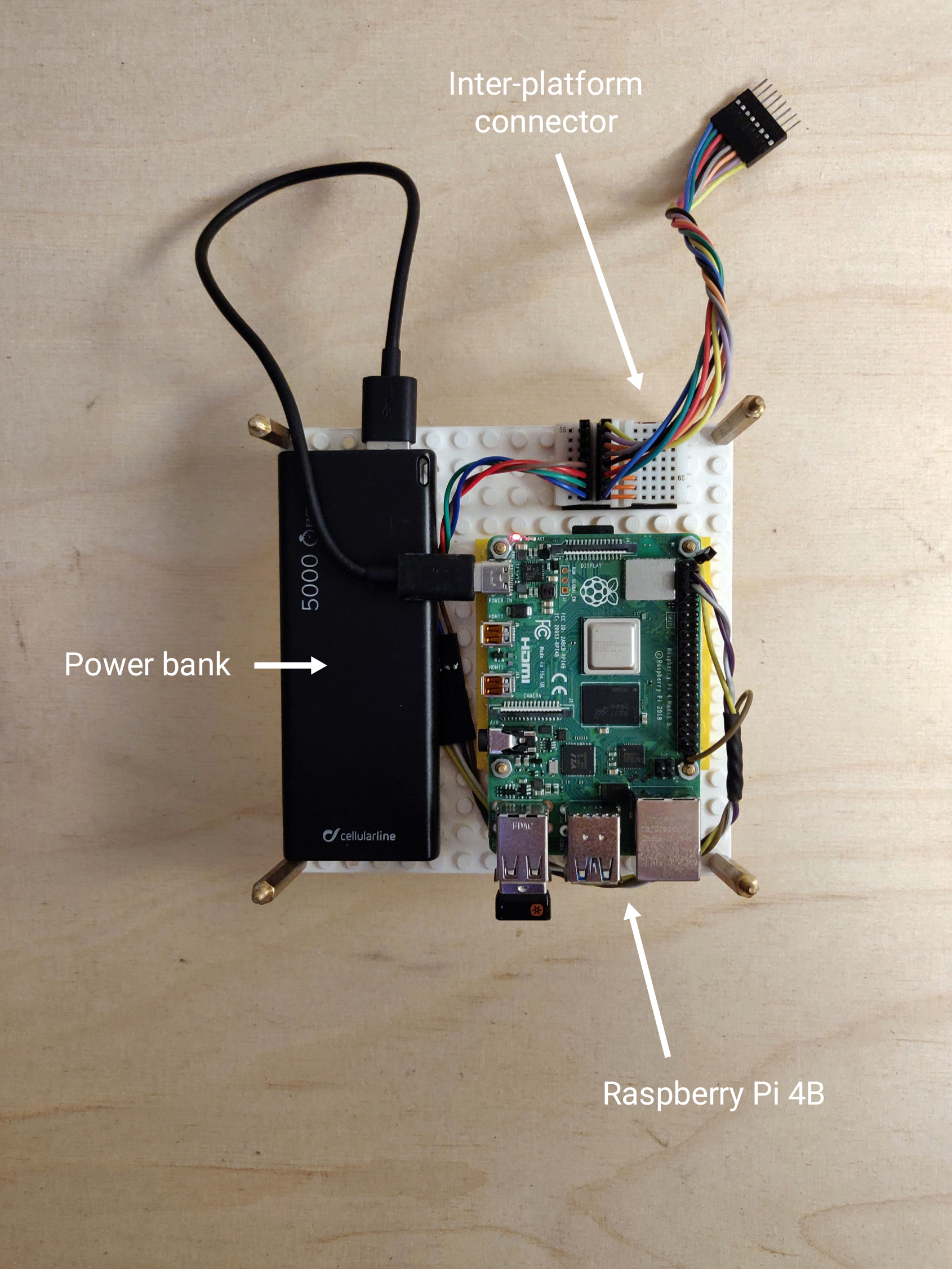
Computing platform
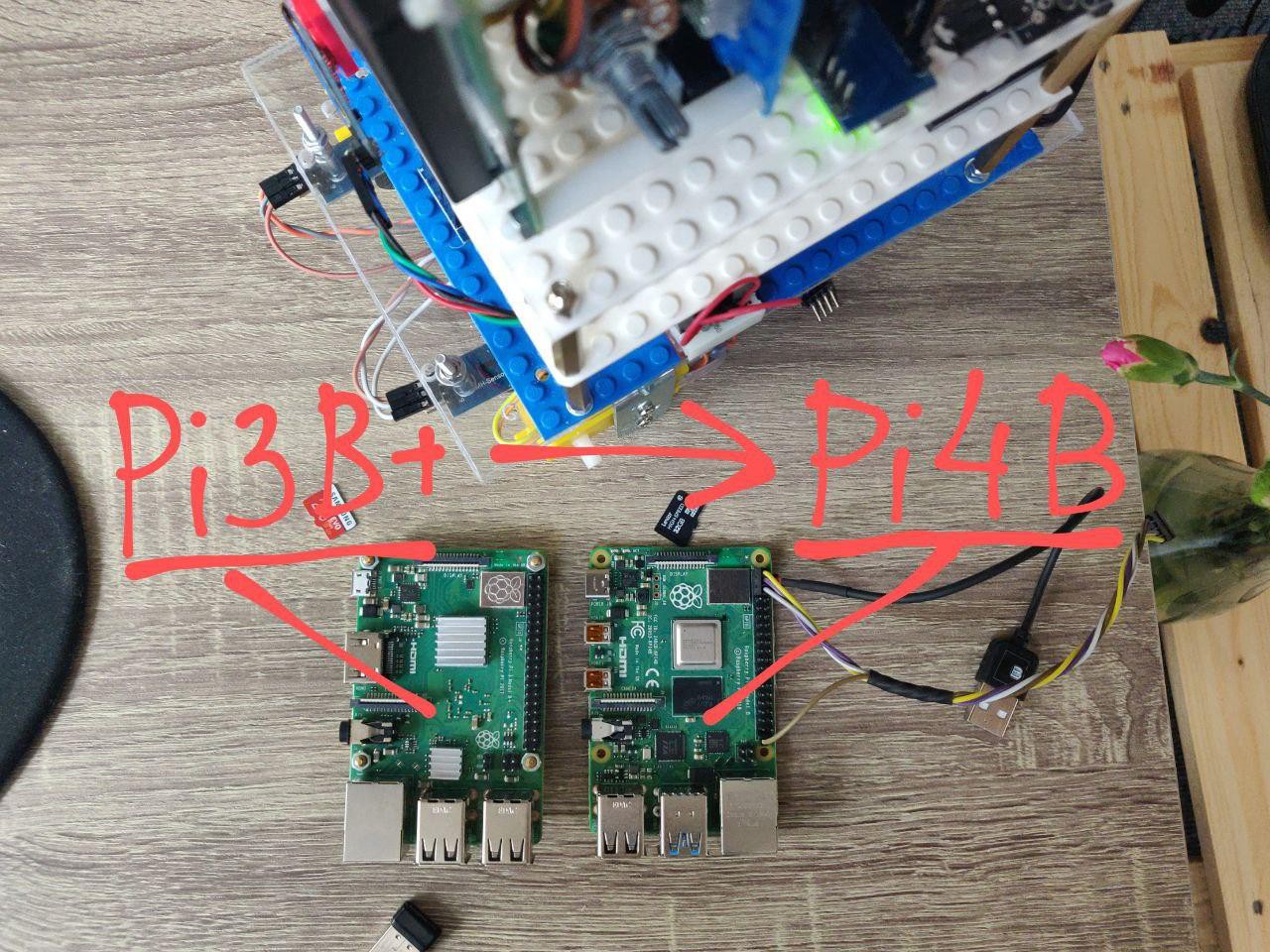
The computing platform has Raspberry Pi 4B with 4Gb of RAM and it's own power bank - for a stable supply of the Raspberry.
![]()
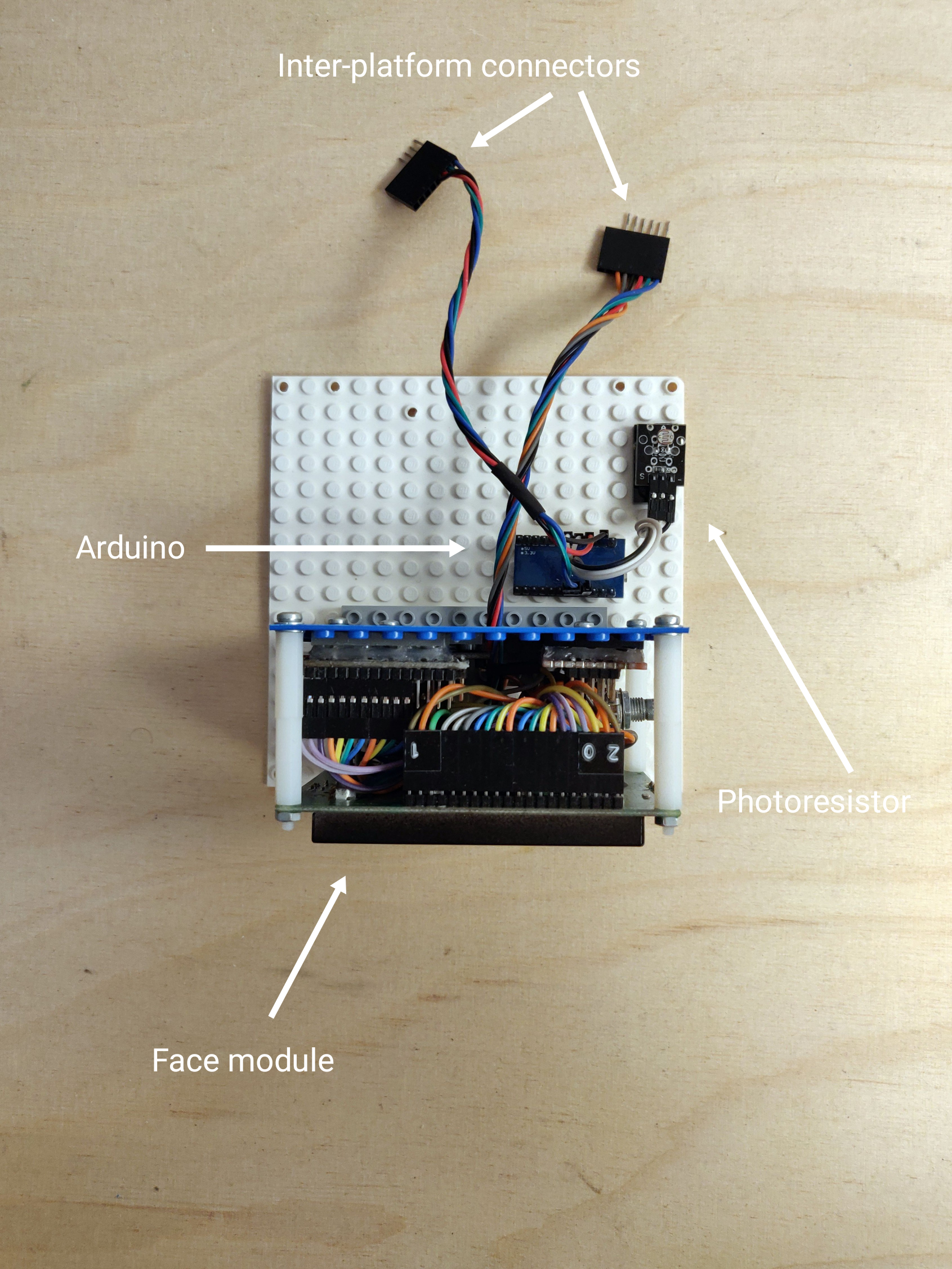
Face+sensor platform
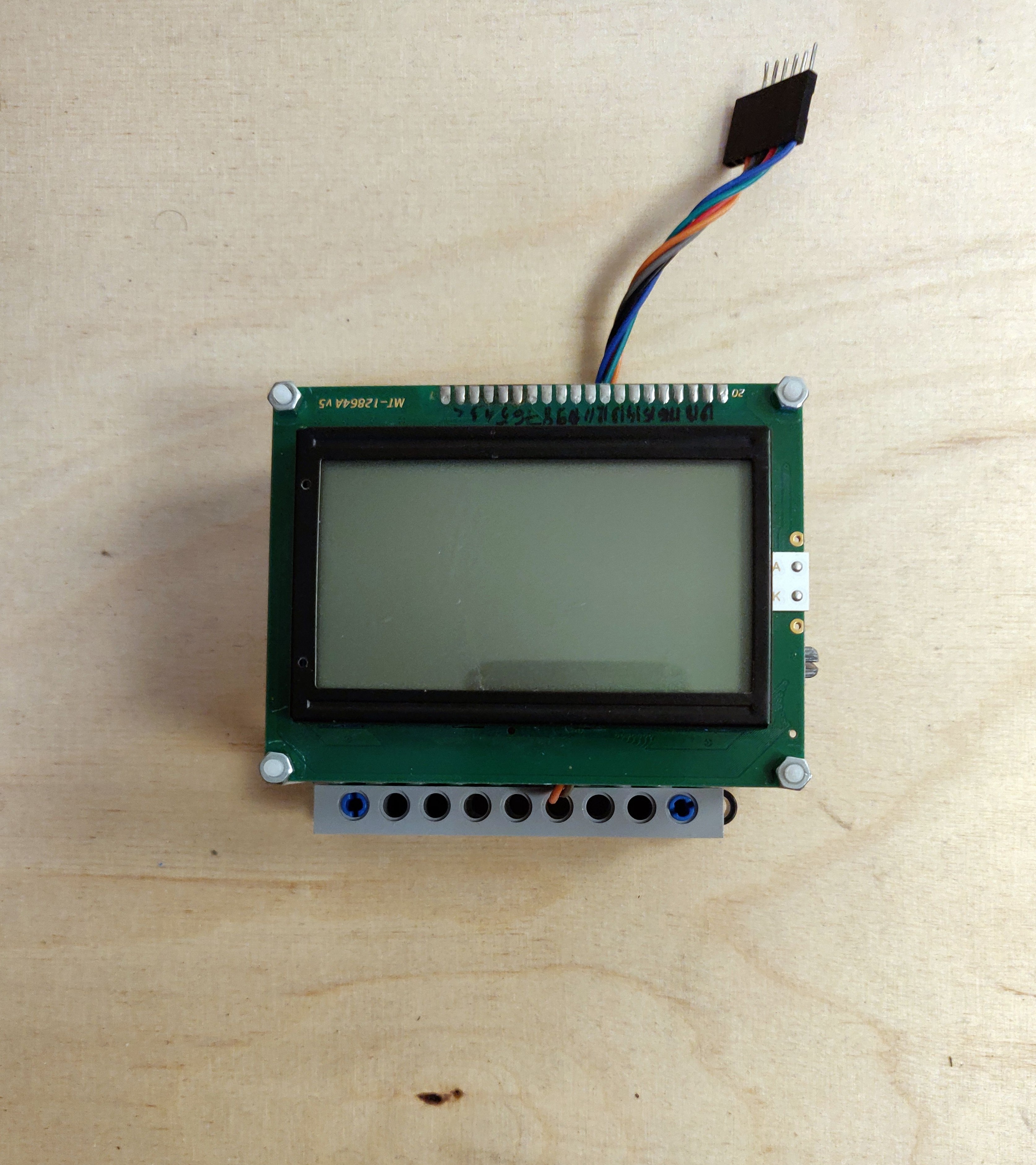
The platform is carrying an Arduino which performs as an I2C device with data collected from sensors (i have only one now) into I2C registers and the face module.
![]()
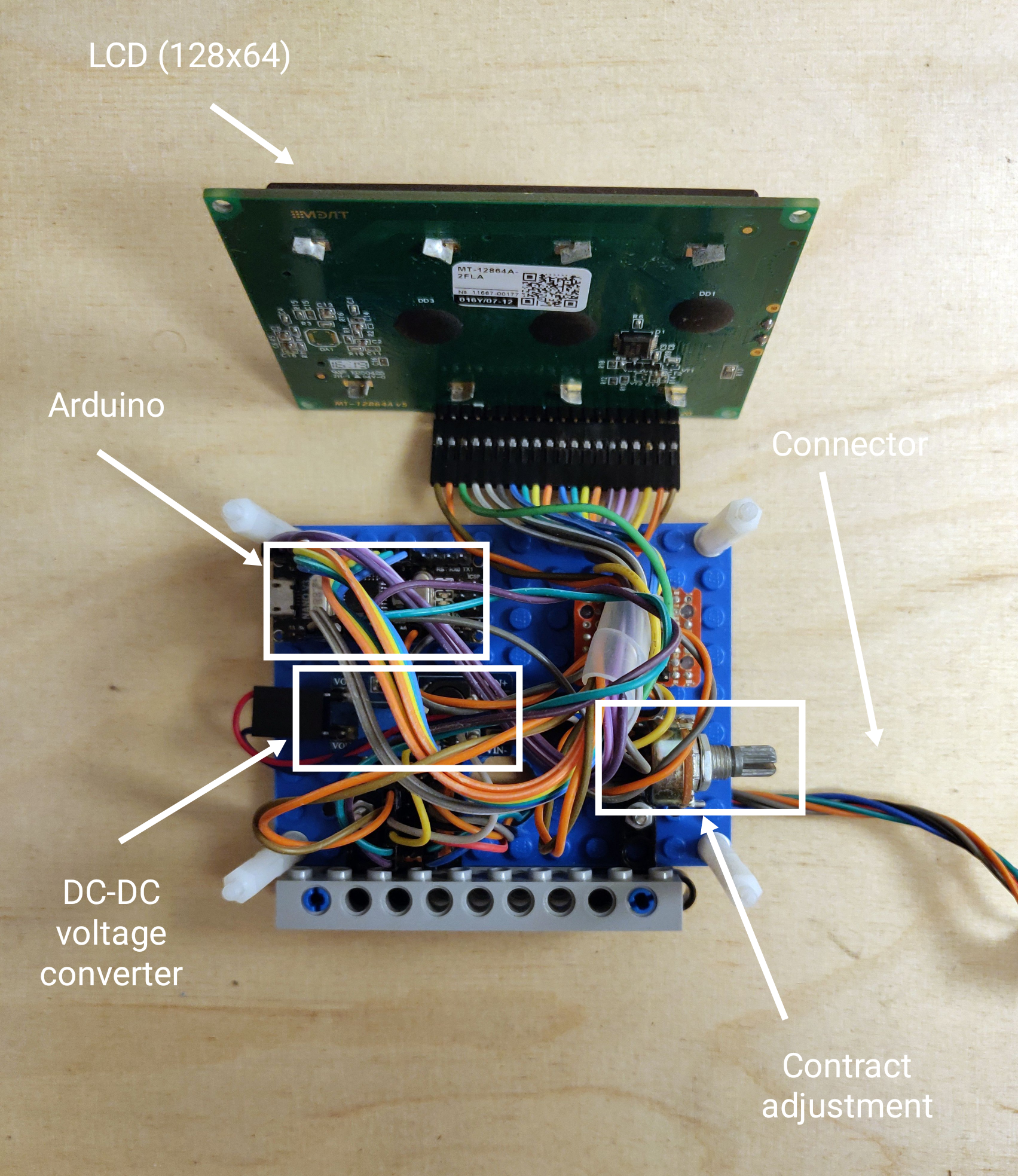
Inside the face module, there are another Arduino and a DC-DC convertor (for LCD supplying)
![]()
![]()
That's it, thank you for your attention!
I'm going back to writing the firmware for ESP32. CU soon!
-
Prototype of a new moving platform. Work in progress
07/03/2020 at 22:28 • 0 commentsPlanned: ESP32, gyroscope, accelerometer, onboard data processing, variable speed, wireless mode and more!
![]()
-
Some zakharos_core documentation
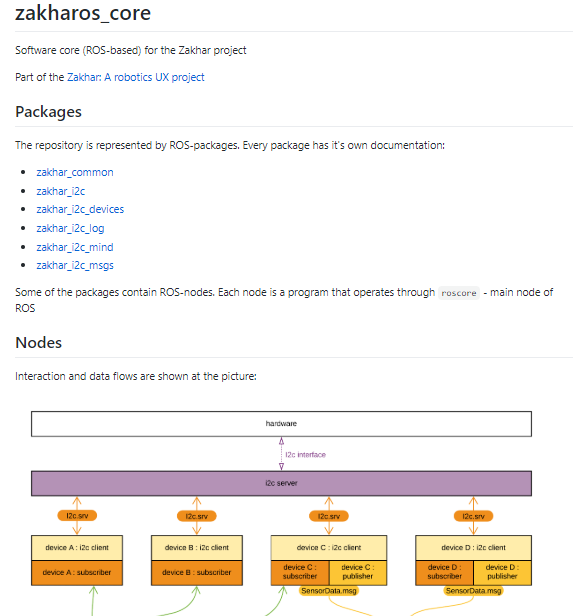
06/30/2020 at 18:30 • 0 commentsBefore moving to the reimplementing of moving platform on ESP32 I've added some documentation to the zakharos_core repository. Code has a lot of roughness that will be polished later (probably on the next milestone - The Emotions Demo)
Documentation is not complete but will be supplemented with time. Probably the illustration, requirements and how to build should be enough to check the implementation out. So PTAL if you are interested!
Repository: an-dr/zakharos_core
The code inaction: Reimplemented the Reptile demo with ROS!
-
Reimplemented the Reptile demo with ROS!
06/29/2020 at 20:37 • 0 commentsHalf-milestone. What's new for now:
- Brand new moving platform
- United sensor/face platform
- Raspberry Pi 4
- New ROS-based application architecture
- Updated face module with stabilized voltage
- Updated cable system with 8-pin connectors
- Stable (finally) I2C connection. Thanks to lower frequency (10KHz) and the new connectors.
-
Out of memory: moving to RPi4
06/25/2020 at 17:59 • 0 commentsOk, ROS needs RAM.
Just received Raspberry Pi 4 B with 4 GB of RAM and finally I can continue implementation of this structure. Stay tuned!
![]()
-
Improved ROS-based architecture for the program core
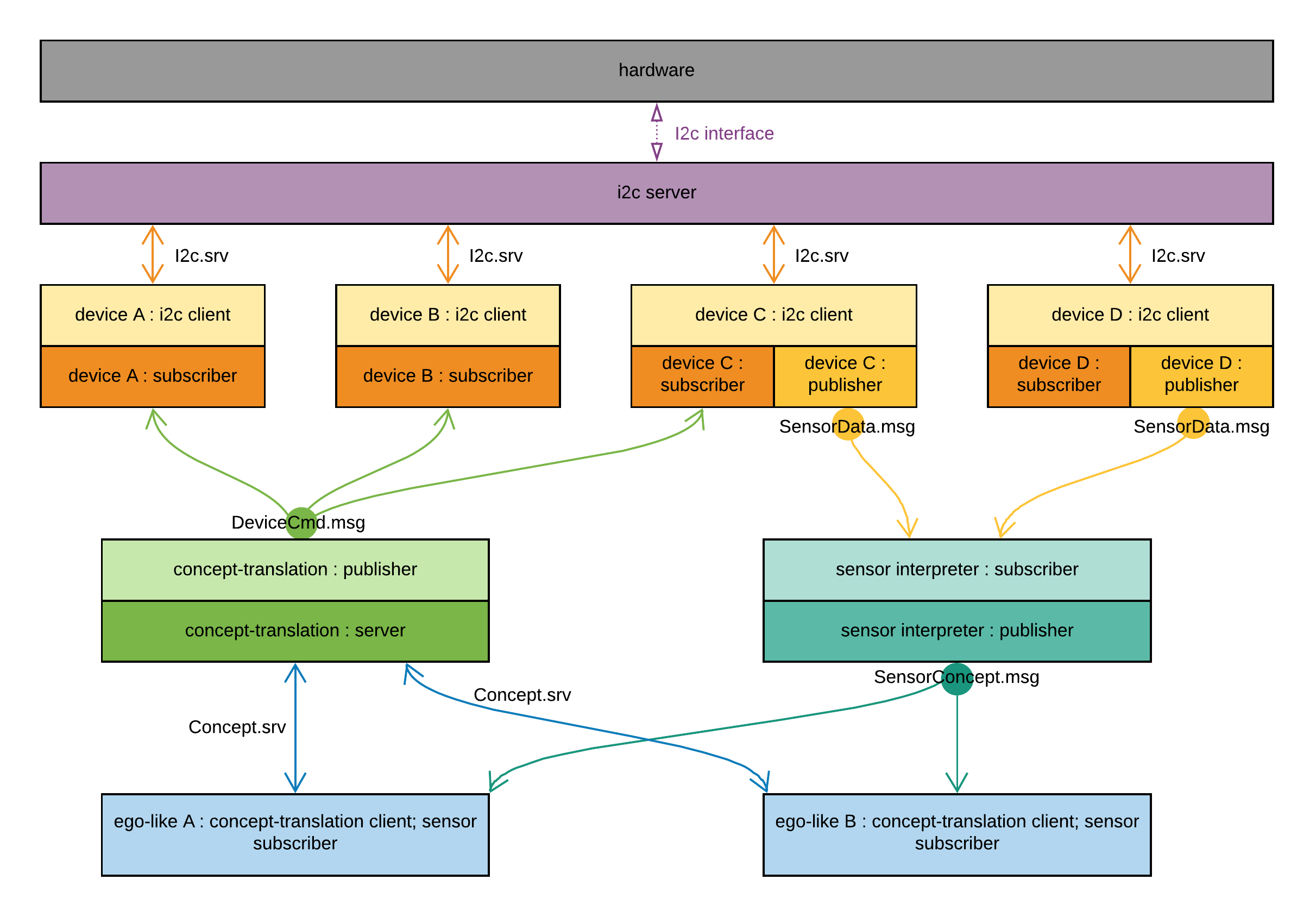
06/18/2020 at 21:34 • 0 commentsI'm about to finish migration to the ROS. Aside small things, architecture seems crystalized. It looks like following:
![]()
Every block represents ROS-node (except the hardware block). Interaction between blocks is trying to mimic a real brain (as I understand what is happening there).
I'm lazy to describe every node right now, I will write an article when this work will end up with the second demo. But if you interested you can check the code out in the repository here:
https://github.com/an-dr/zakharos_core
More about ROS: http://wiki.ros.org/
-
Just a photo with current state and a repo I'm working on.
06/11/2020 at 19:03 • 0 comments![]()
https://github.com/an-dr/zakharos_core (just pushed one more step according the plan)
-
Moving platform update 1
06/06/2020 at 08:44 • 0 commentsWhen three wheels are better than four