Andrei Gramakov
Andrei Gramakov-
Thoughts about execution of commands in a mind-like program
05/31/2020 at 20:36 • 0 commentsI'm trying to reverse engineer myself and apply it to the Zakhar. Some points:
- I can't send a direct order to, let say, my hand
- I must form a concept, like "fold fingers into a fist" or "move the hand up"
What that's mean for Zakhar:
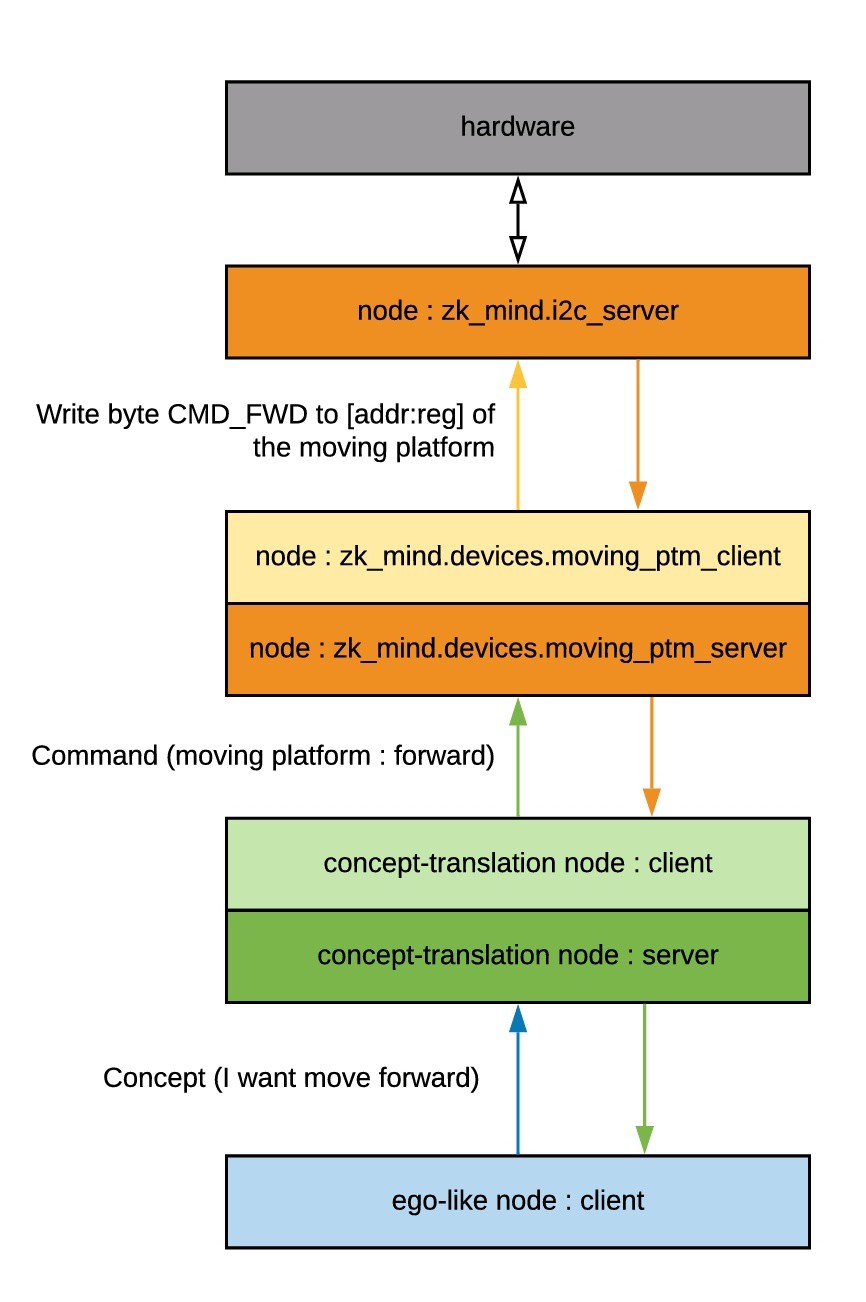
- The main program should use high-level commands or concept
- It is needed one more node translating these concepts into commands for devices
Possible in-program interaction using terms of ROS and Zakhar should be like:
![]()
The thoughts are related to: https://github.com/an-dr/zakharos_core -
The Zakharos Milestone
05/31/2020 at 09:46 • 0 commentsStarted the work on the next milestone called Zakharos. Aims of the milestone:
- Re-implementing The Reptile Demo with ROS - for simpler development of sophisticated Mind's structures
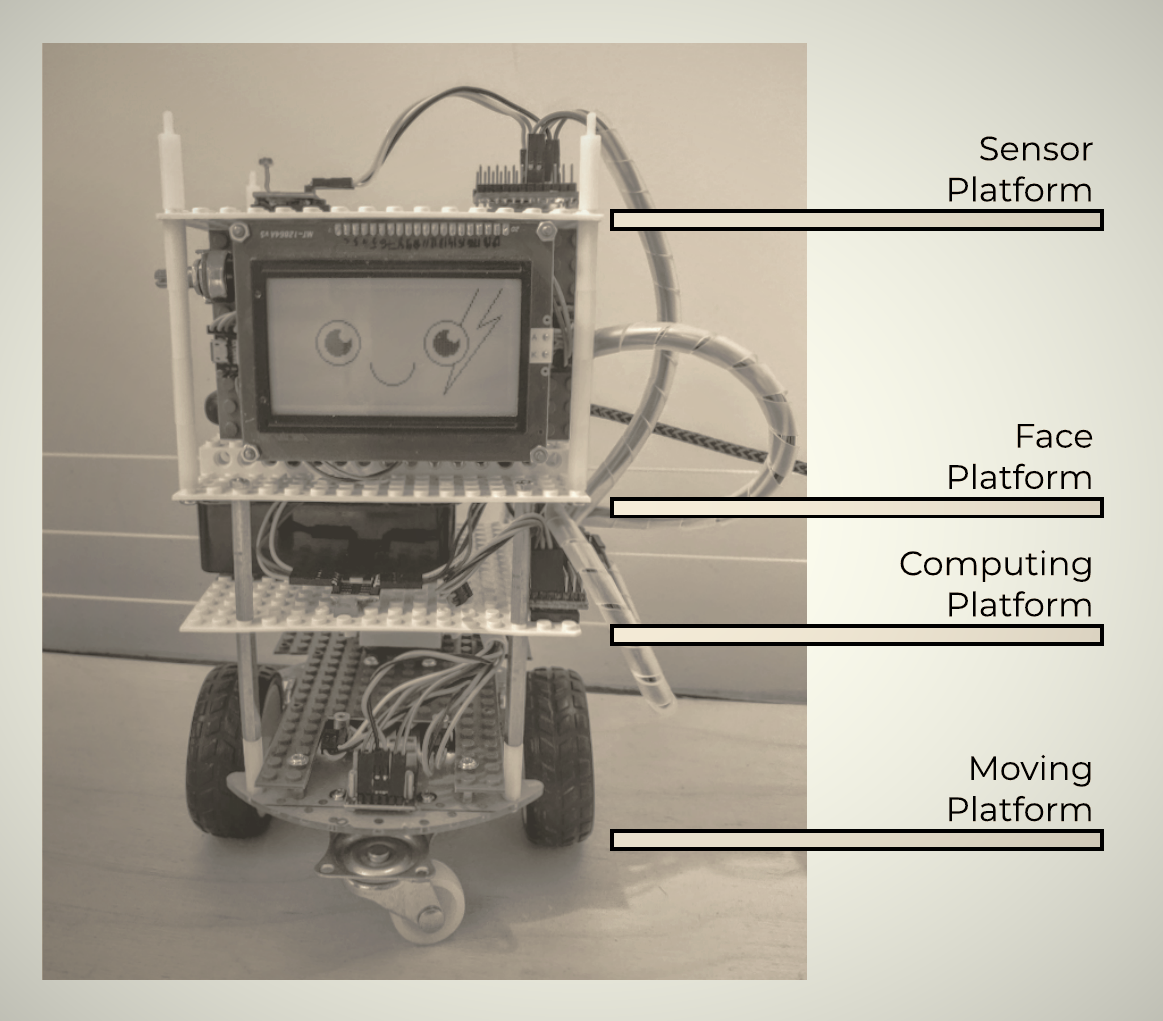
- Re-implementing Moving platform with the ESP32 , an accelerometer, PWM, FreeRTOS and WIFI communication - for faster responses, precise positioning, simpler access and more stable working.
![]()
-
Robot with the Conscious: Imitating animal behavior for reducing user’s anxiety
05/29/2020 at 18:59 • 0 commentsFinally! Just finished an article about my robot.
Robot with the Conscious: Imitating animal behavior for reducing user’s anxiety
#robot #article #robotics #embedded #zakhar #hardware #automation #engineering #hobby #diyproject #embeddedsystems #electronics
![]()
-
Moving to the Robot Operating System
05/27/2020 at 22:57 • 0 commentsThe first experiments with ROS showed that it probably will help a lot in building mind-like organized programs.
Node-based conception and server-client interactions hopefully allow me to think less about queues, threads, and access control, which took the most of the time during building the first demo on bare Python.
Here are some ideas of the mind-like program architecture. I probably will working on it next weekend.
![]()
Colored blocks are nodes
-
The Reptile Demo
05/25/2020 at 15:17 • 0 commentsWhile I'm finishing a new article about the project, please look the video demonstration. Without the context for now