 Leandro
LeandroCurrently I am on the stage of upgranding the control board to use the TTGO t-display board, which has an integrated display which will help in the development of the prject and also is a cheap and easily available board.
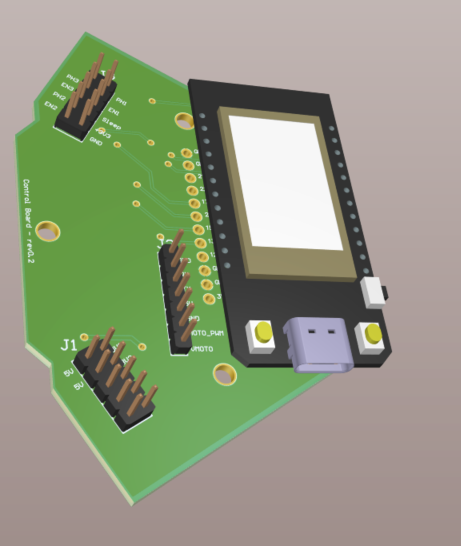
Yesterday I finished the board v0.2 with TTGO:
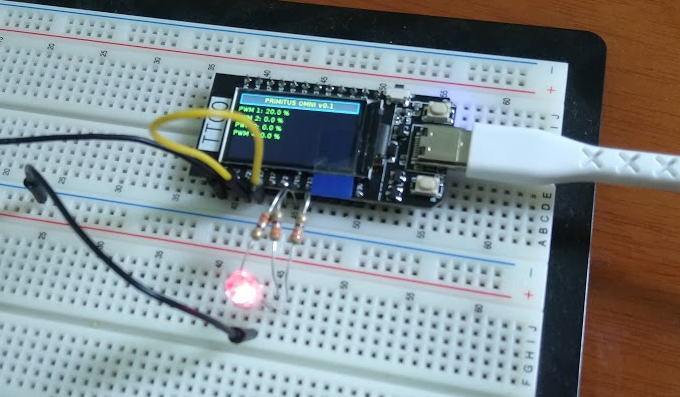
And in parrelel I am testing all the interface with the other parts of the robot before sending to manufactured (GPIO, PWM, UART).
The pcb files are already available in github:
https://github.com/LeandroTE/OmniHardware
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.