 Jacob David C Cunningham
Jacob David C CunninghamMainly because it's too dumb/can't carry more weight. So if you don't watch it and it's not running in a place where surfaces have a perfect edge to be detected/reflection then this robot will just run into it.
There were some goals I did not hit in here, like the telemetry for example, it would not have been hard to get it from the robot to the phone/web but I have not interfaced with an IMU before so that'll be my next thing.
My next project is a hybrid sensor/power system all in one but it's nothing really advanced/will only drive a basic 2-servo wheeled "tank" type robot. But the main focus is a combination of OpenCV(camera edge detection) and range averaging by depth(single point "Lidar" plus the ultrasonic sensor on a scanning pan-tilt system). I say all that but we'll see how it goes. The two-wheeled robot is able to carry more weight. For example this legged robot here I put an 8 oz weight on it and the robot could not carry it... the new hybrid sensor module with all its parts will weigh at least 6 oz no body... so yeah. But it will be cool, will have IMU inside, ADC... it'll be interesting. I'm looking forward to the software aspect, all powered by a Pi Zero. It's definitely going to be slow/not intended for say flying through a forest but yeah.
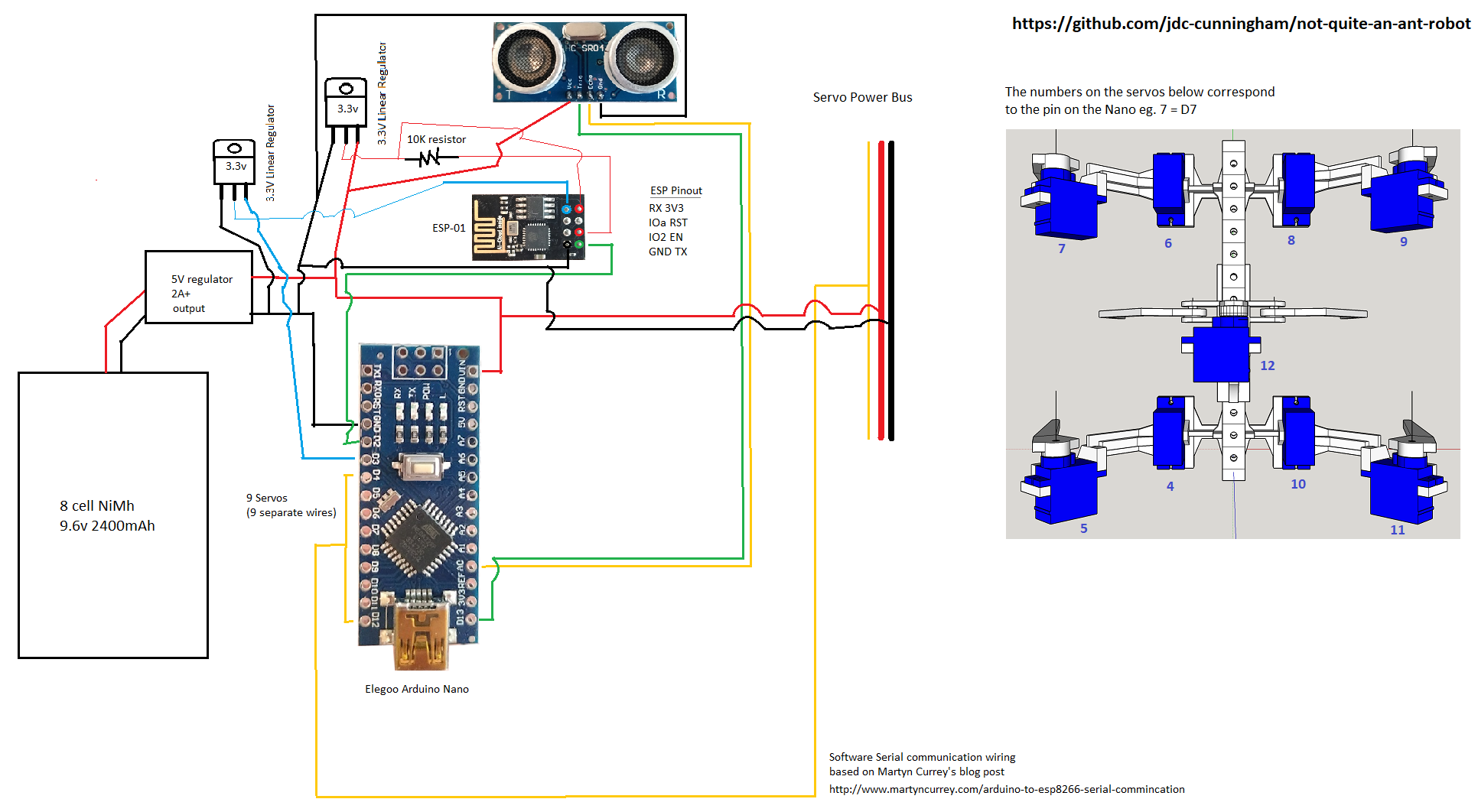
Here's some content updates for this project though, I made a lazy MS Paint schematic that's on the repo.
Last video, it's pretty fast relatively... I don't know if this is the fastest it can go.
I'll post about the new project after I have a prototype built... physically it's not hard to build, I just have to model all the parts/build a case for it, design the combined pan-tilt system, etc... but ideally I will be able to just mount it to this old body I have.
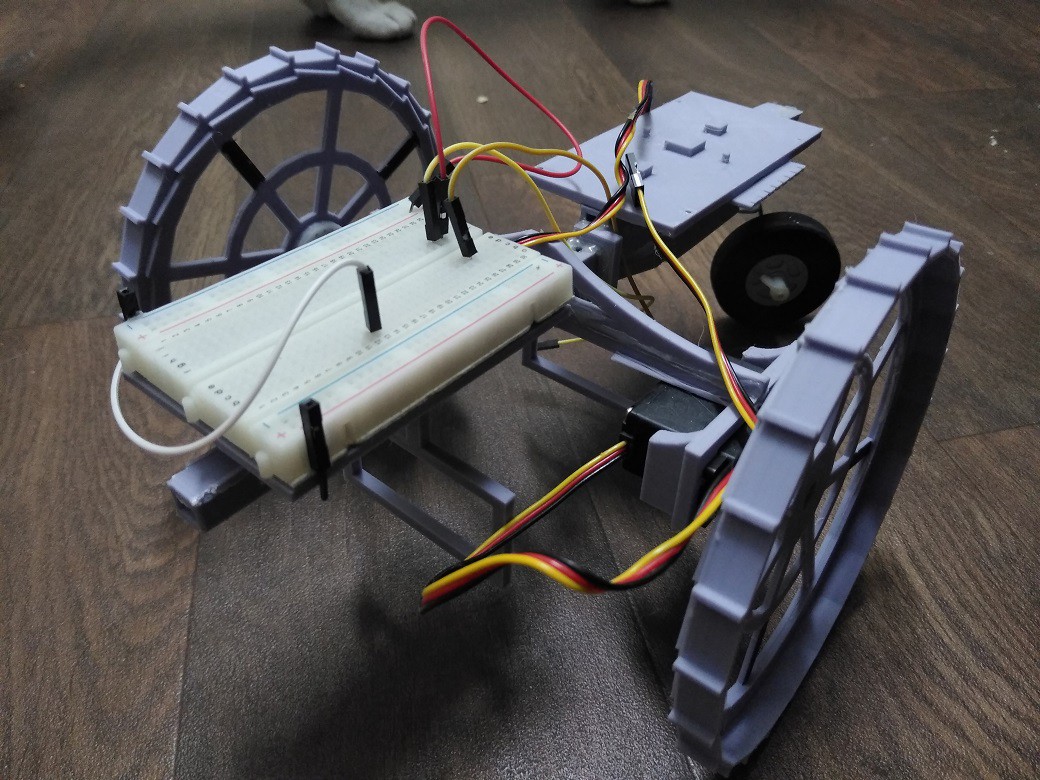
This literally would carry an Arduino Mega 2560 on it ha and a chonk 3000mAh 7.2v 6 cell NiMh battery
Overall it was a good project, learned a lot.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.