 Benjamin Prescher
Benjamin PrescherBetaflight has evolved over the past few years - new features are constantly being added to further improve the flight behavior of racing drones.
To put it bluntly, turn everything off and stick to the basics!
This is of course a bit of an exaggeration, but many of Betaflight's advanced controller functions are not needed and even make the drone's flight behavior unstable. The reason for this is relatively simple. With "normal" 4x drones, each of the rotors can intervene directly in the system. However, the ball drone requires a minimal amount of thrust in order to exert effective forces on the system through the air guide flaps. PID control of the vanes is required, based solely on the position information from the accelerometer and gyroscope. In order to generate this location information, Betaflight also offers a number of setting options, in particular for signal processing (filters), which I would like to investigate in more detail in the future.
The test flights that I have carried out so far worked best with the displayed settings:
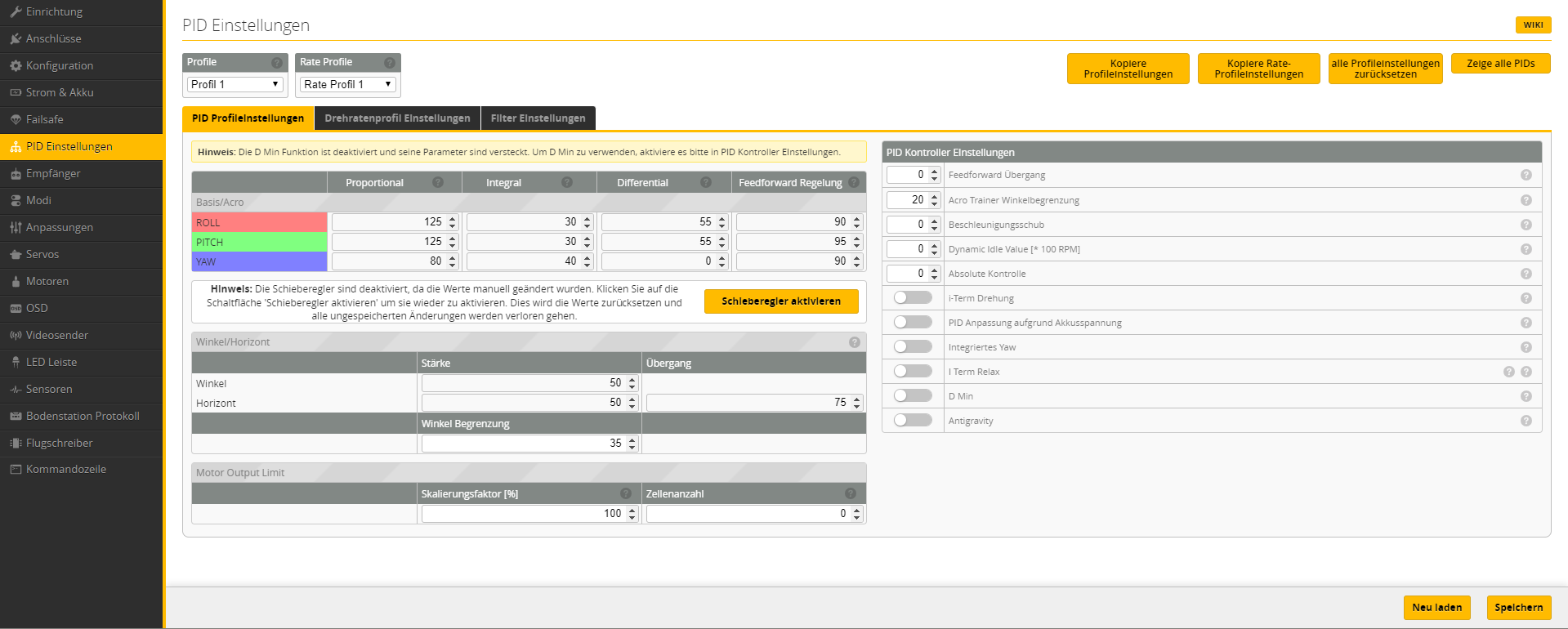
Note the high percentage of P compared to a classic x-220 racer. The drone will be more stable with a good part of the D component and a small I component.
I would also like to point out the angle limitation: Here the risk of a possible tip over of the drone can be reduced by setting an angle limitation.
In the future I would like to look at BF's black box logging and hopefully be able to derive important information about the PID setting from it.
PS: I look forward to your comments and messages!
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.