Construction
The helmet is made from cardboard with aluminium foil and tape.
A red LED is hot glued on a glass sphere for the eyepiece, which came from a japanese limonade bottle . The blue tint of the glass have a nice touch on the eyeball look whether its illuminated or not.

Electronics
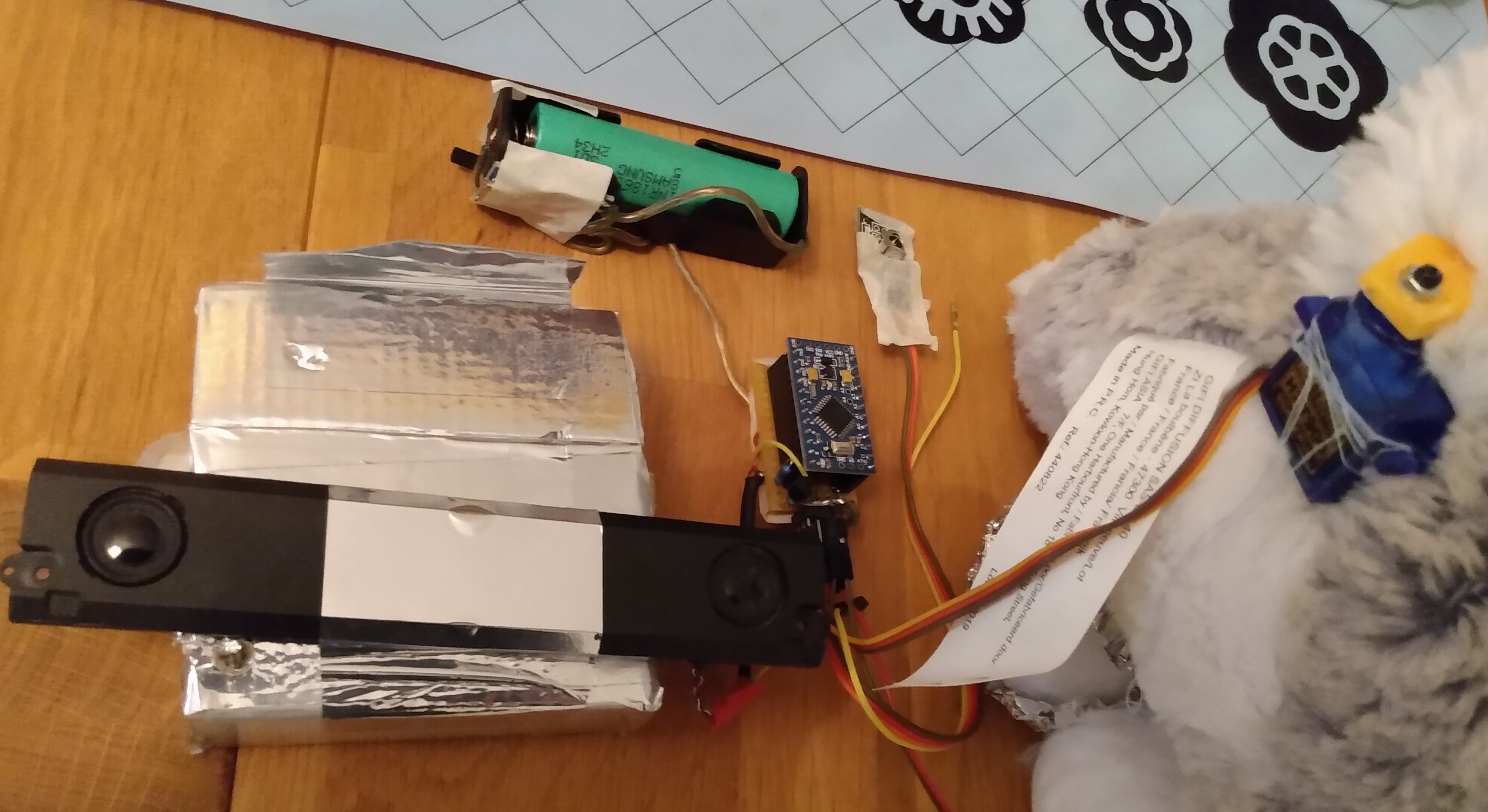
- 1x 18650 samsumg INR
- 1x arduino pro mini
- 1x IR receiver
- 1x 9g servo with toothpick arm
- old laptop speakers
Software
I used the the mozzi library to play samples : https://sensorium.github.io/Mozzi/
I was much limited by the available memory in the pro mini and was able to store only one 19ko barking sound.
To have him play differents notes , i modulated the sample speed to match the required note. It was a good opportunity to learn about audio in general. I used audacity to find the main frequency of the sample I used and went from this reference to calculate the other notes speeds/frequencies.
Limitations
The sound level is not too loud , maybe because i run the thing directtly on the 3.3V of the li-ion cell.
I did a first test with an old phone speaker but the sound was barely audible .
The mozzi library seems to take control of the only timer of the arduino, making the use of the default servo library impossible. I tried to use other servos libraries to rely on another timer but it didn't work.
As i didn't needed high accuracy for the servo positionning, i resorted to do a "manual" PWM in the main loop to control the tail wagging speed and duration.
The downside is if it tries to wag the tail while barking, it slows the main loop , making its voice as the one of a degenerated robot-pooch.
Conclusion
had fun , would build again :).

 Gintaras Valatka
Gintaras Valatka
 atomkemp
atomkemp
 G. Rosa
G. Rosa
Who's a good boy?