 Robin Fröjd
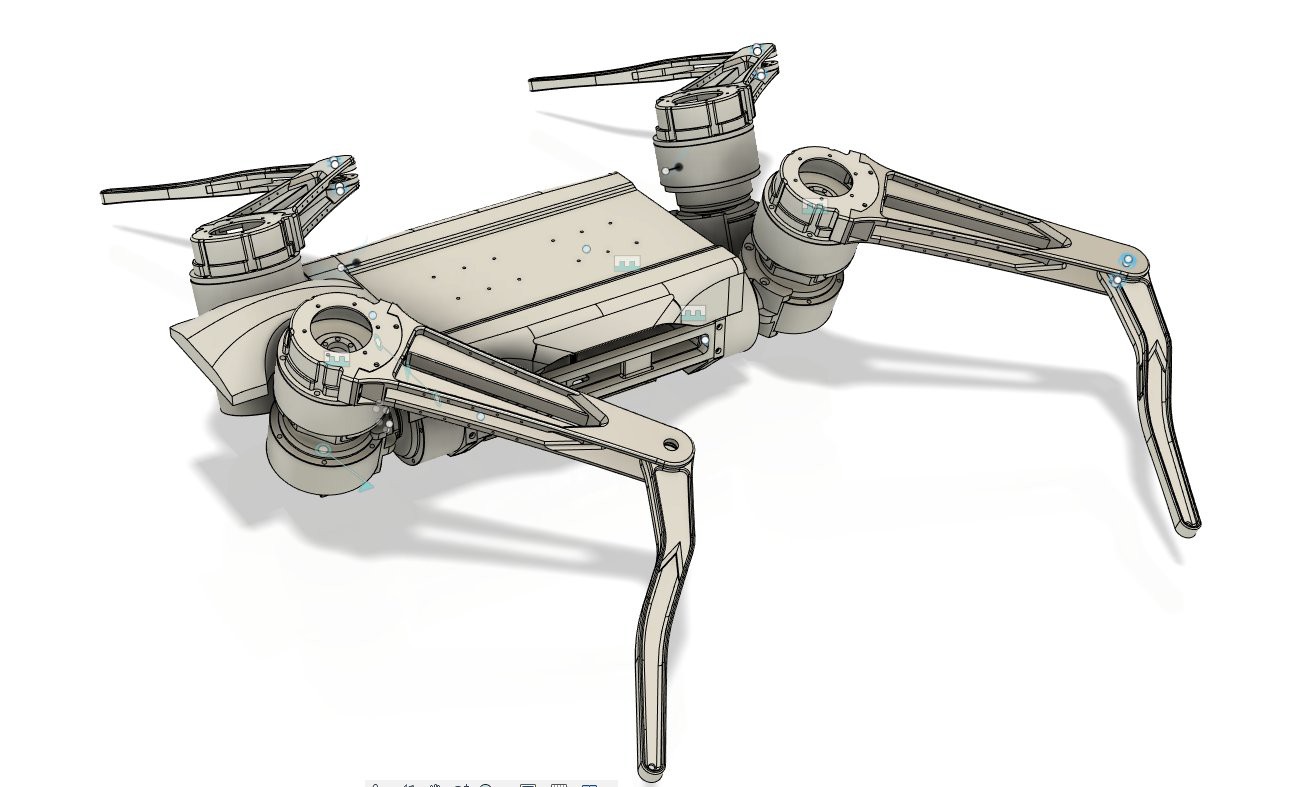
Robin FröjdBack to the drawing board for some of the covers to increase range of motion. Target motion for the is hip +-70°
A project log for K3lso Quadruped
K3lso is a quadruped robot similar to MIT mini cheetah and MIT Cheetah 3.
Back to the drawing board for some of the covers to increase range of motion. Target motion for the is hip +-70°
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.